88万人のタッチダウン

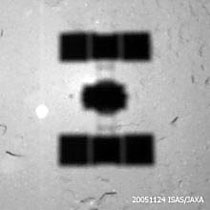
「はやぶさ」の影と、落下するターゲットマーカー(白)とその影
垂直降下開始時の速度は毎秒12cmだった。5時28分、高度54mに到達した時点で、ターゲットマーカーの拘束解除の指令を出し、5時30分、高度40mで、探査機自身が毎秒9cmの減速を行って、マーカーを切り離した。つまり、マーカーは秒速12cmで降り続け、「はやぶさ」本体は秒速3cmで降下していったというわけである。マーカーは、イトカワ表面上、「ミューゼスの海」の南西に着地し、画像トラッキングに成功した。「はやぶさ」はその後、高度35mでレーザ高度計(LIDAR)を近距離レーザ距離計(Laser Range Finder: LRF)に切り替え、高度25mで、降下速度をほぼゼロにして浮遊状態(ホバリング)に入った。
イトカワ表面に着地したターゲット・マーカーには、打上げ前に日本惑星協会が実施した「星の王子さまに会いに行きませんか ミリオンキャンペーン」に応募した88万人の人々の名前が、アルミ箔に刻まれている。半導体の微細な構造を作っていく特殊な技術を駆使して、0.03mm角の大きさのアルファベットで綴られている。今後永遠に「イトカワ」先生と一緒に過ごしていただくことになる。それを聞いて「しまった!」と思う人がいなければいいのだが……。
その後、「はやぶさ」は自由降下を行い、5時40分頃、高度17m付近で、地表面の傾斜に自分の体の向きを合わせる姿勢制御のモードに移行した。この時点で、「はやぶさ」は自律シーケンスにより、予定通り地上へのテレメトリの送信を停止し、ドプラー速度の計測に有利なビーコンのみの送信に切り替え、同時に、送信アンテナを広い範囲をカバーできる低利得アンテナに切り替えた。
以降、実時間での搭載各機器の状態の把握は(予定通り)できなくなったが、「はやぶさ」上で記録されたデータを再生した結果によれば、まもなく「はやぶさ」のファンビームセンサーが障害物を検知し、探査機は自ら判断して緊急浮上を試みた。しかしながら、浮上加速をするための姿勢が許容範囲外であったため、結果として安全な降下の継続が選択された。「はやぶさ」は緩やかな2回のバウンドを経て、およそ30分間にわたりイトカワ表面に着陸し、地球からのコマンドで離陸した。これにより「はやぶさ」は、小惑星から離陸した世界初の宇宙船となったのである。
指令を受け離陸した「はやぶさ」は、100kmの彼方まで飛び去った後、セーフモードに移行した。