ミッションの概略

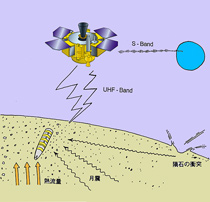
LUNAR-A 観測運用の模式図
衛星の推進系は、500N(ニュートン)の2液式(ヒドラジンN2H4とNTO)エンジンと1N/20Nの1液式(ヒドラジン)エンジンからなり、姿勢は、スピンによって安定化が保たれる。
衛星と地球局の交信には、Sバンド(2GHz帯)の電波を使う。臼田局の64mのパラボラアンテナを使えば、月周回中の衛星から地上局までのデータ転送率は、通常時で8kbps、良い条件の時には32 kbpsになると予想される。
M-Vロケットにより打ち上げられた探査機は、直接に月周回軌道には投入されず、月引力を利用して一度月から大きくはずれた軌道に投入され、その後、太陽の引力を利用して月に再接近する。これは燃料の軽減に役立ち、その分だけ探査機を軽くすることができる。そのための「スウィングバイ」技術は、すでに「ひてん」衛星や“GEOTAIL”衛星で修得されている。
衛星は最初に、軌道傾斜角約20゜、月面からの高さにして45km×200kmの楕円軌道に投入された後、近月点付近でペネトレータモジュールを切り放す。衛星から切り離されたペネトレータモジュールは、ロケットモータを使って減速され、高度25kmから自由落下をする。自由落下の間にガスジェットを使ってペネトレータの姿勢を月面に対して垂直にした後、キャリア部を分離して月面に衝突させる。この時の衝突速度は約270m/秒で、衝突時にペネトレータ本体が受けると予想される衝撃は約5,000Gになる。いろいろな実験結果からこの衝突によってペネトレータは月面の地下1~3mの深さにまで潜り込むと推定される。
ペネトレータは月面の2地点に投下される。そのうち1地点はアポロ12号着陸地点の近傍、もう1地点はほぼ反対側にあたる月の裏側に設置される。これらのペネトレータでは、月震計測、および熱流量計測を実施し、月の内部の地震学的構造、熱的構造についてのデータを取得する。
観測データはペネトレータ内部のメモリーに一時記録される。約2週間ごとに母船がペネトレータ上空に来て通信できるようになった時点で、そのデータを母船に送信する。月面表層の物質の電気伝導率はきわめて低いために、この深さからでも電波によって上空の母船と交信できる。
母船は地球局との通信可能期間にそれらのデータを地上局(臼田宇宙空間観測所)に送ることになる。コマンドは逆のルートでペネトレータへ送信される。