現在、「はやぶさ2」はリュウグウ到着に向けてイオンエンジンの運用を行っていますが、5月11日にイオンエンジンをいったん停止して、スタートラッカ(注1)によってリュウグウの撮影を行いました。これは、探査機からリュウグウの方向を観測することによって光学航法(注2)を行うためです。
撮影は、5月11日から14日にかけて、ほぼ1日おきに3回行いました。1回の撮影では、数時間の間に3枚の画像を取得しています。撮影はすべて成功し、写っていたリュウグウの位置を正確に計測しました。このデータを使って、リュウグウと「はやぶさ2」の軌道を正確に求める作業を開始しています。
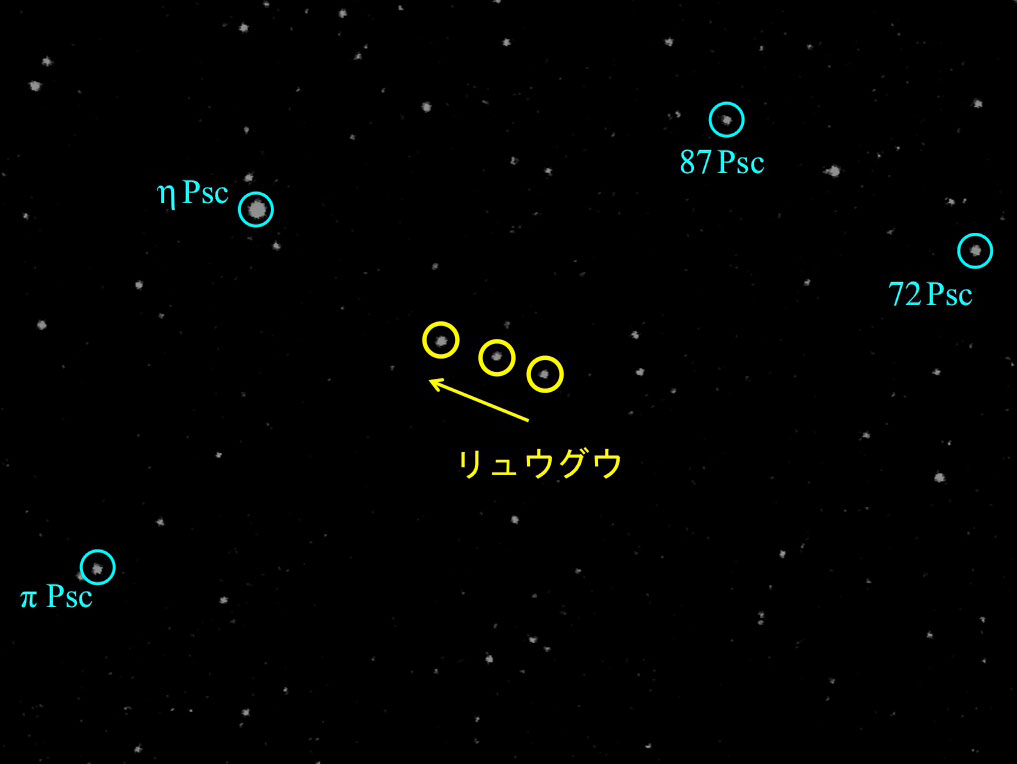
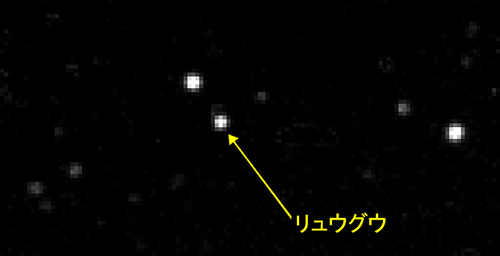
図1 スタートラッカによって撮影されたリュウグウ。図中で黄色の丸で囲まれた天体がリュウグウ。右から左へと移動している。撮影時刻は、右から5月12日1時頃、5月13日2時頃、5月14日1時頃(日本時間)である。探査機から見てうお座の方向にある。Pscとはうお座の略符である。画角は約 9°×7°。 (画像提供:JAXA、京都大学、日本スペースガード協会、ソウル大学)
図2 上記の画像のアニメーション。中央付近で右から左に動いている点がリュウグウ。現れたり消えたりしている像はノイズである。 (画像提供:JAXA、京都大学、日本スペースガード協会、ソウル大学)
注1)通常は恒星の位置を計測することで探査機の姿勢を推定することに使われる装置。今回は、カメラと同様に画像を撮影するモードで使用した。
注2)探査機の軌道は、通常は電波による通信で推定する。これを電波航法と呼ぶが、「はやぶさ2」がリュウグウに到着するときには、リュウグウの軌道と探査機の軌道をより正確に知るために、探査機からリュウグウの方向を計測し、そのデータも利用してリュウグウと「はやぶさ2」の軌道をより正確に推定することを行う。これを光学航法と呼ぶ。