
本連載の最終回として、地上系の構成、運用システムの特徴を説明します。EQUULEUS、OMOTENASHIと地球との通信には、図1のようにJAXAのアンテナ局とNASAのDeepSpace Network(DSN)を使用します。探査機は超小型ですが、通信するためには大型のアンテナが必要になります。そのため、アンテナ局を使用するJAXAやNASAの衛星・探査機と運用時間の調整が必要になります。また、最近ではDSNの各アンテナ局とJAXAの運用室との間でのデータの疎通試験を順次実施しており、DSNのWebサイト(DSN now)をご覧になると、運用中の様々な探査機に加えてEQUULEUSやOMOTENASHIの名前を見つけることができるかもしれません。加えて、両探査機ともに精密な軌道決定が必要になるので、通常用いられるRange and Range Rate(RARR)計測 ※1 に加え、DSN局と連携したDelta Differential One-way Range( DDOR)計測 ※2 も実施します。DDORは、「はやぶさ2」などでも使用されている実績ある技術ですが、CubeSatでも使用します。OMOTENASHIはそのほか、世界のアマチュア無線家への電波送信も行います。ご興味がある方はOMOTENASHIのWebサイト(JAXA Ham RadioClub )をご覧ください。
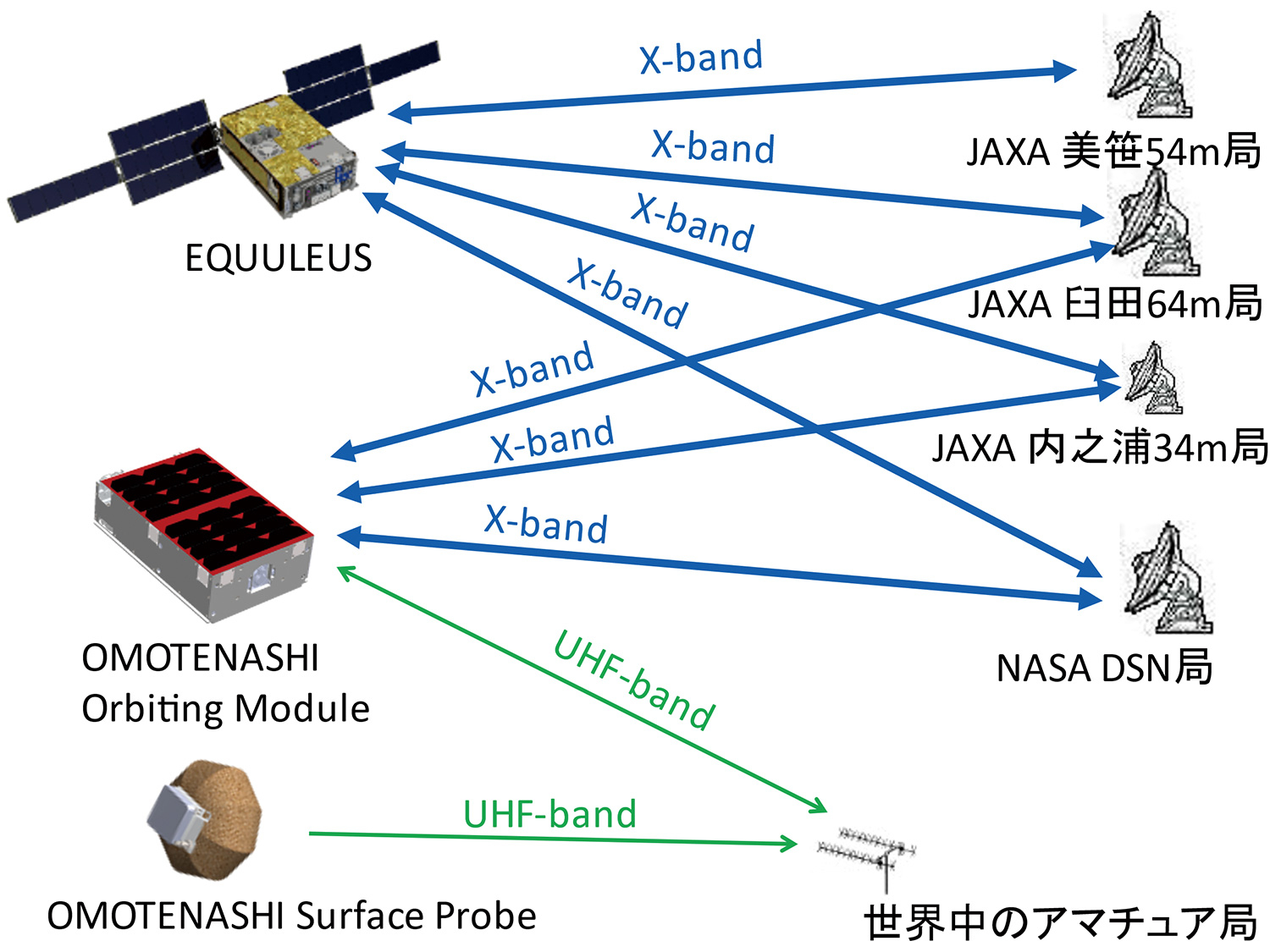
図1 フリーフライングロボットによる作業
探査機に指令(コマンド)を送信したり探査機の状態(テレメトリ)情報を画面表示したりするシステムは、JAXAの科学衛星の運用で標準的に使用されているGeneric Spacecraft Test andOperation Software(GSTOS)※3 を使います。こうした汎用のソフトウェアに、各探査機独自の内容を追加することで、探査機の運用に使うシステム(探査機管制装置)が完成します。例えば、GSTOSの文法に従って、探査機に送信するコマンドやその実行状況の確認項目が記載された「コマンド計画ファイル」を作成し、GSTOSに読み込ませます。また、探査機からダウンリンクされたテレメトリデータを見やすく画面表示させたり、グラフを描かせたりすることも、GSTOSの定義ファイルを作成するだけで自由にできます(とはいえ、0 /1で表されるバイナリデータをどのような物理値に変換して、画面のどこに何色で表示するか、などを全部事細かに記述する必要があるので、大変な作業ではありました)。
探査機は2021年7月にNASAに引き渡し、既にSLSロケットに搭載されています。打上げ後の運用の訓練をするために探査機シミュレータを開発しました。シミュレータのコンピュータや通信機、バッテリなどは実際の探査機と同等の開発品を使用しました。また、無重力空間での姿勢の動きを地上で実際に模擬するのは非常に難しいため、専用のソフトウェアを開発しました。探査機のコンピュータは無重力を飛行しているかのようなデータを専用ソフトウェアから受け取ることで、無重力空間での探査機の動きを再現しています。実際に運用で使用する探査機管制装置をシミュレータに接続すると、運用システムの画面上にあたかも本物の探査機のようにデータが表示され、臨場感ある運用訓練が可能となっています。図2に、運用訓練で使用している運用画面の一例を示します。
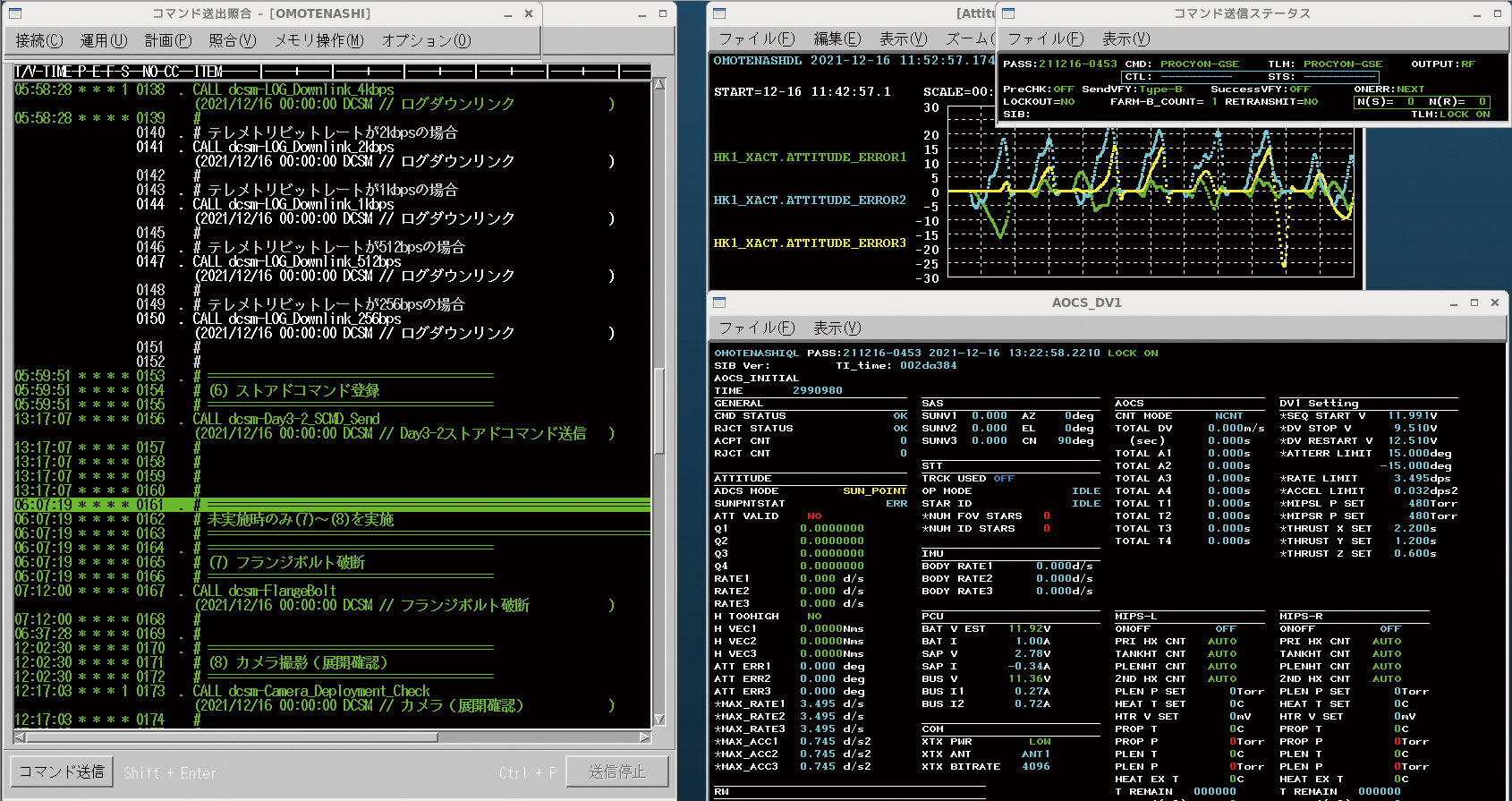
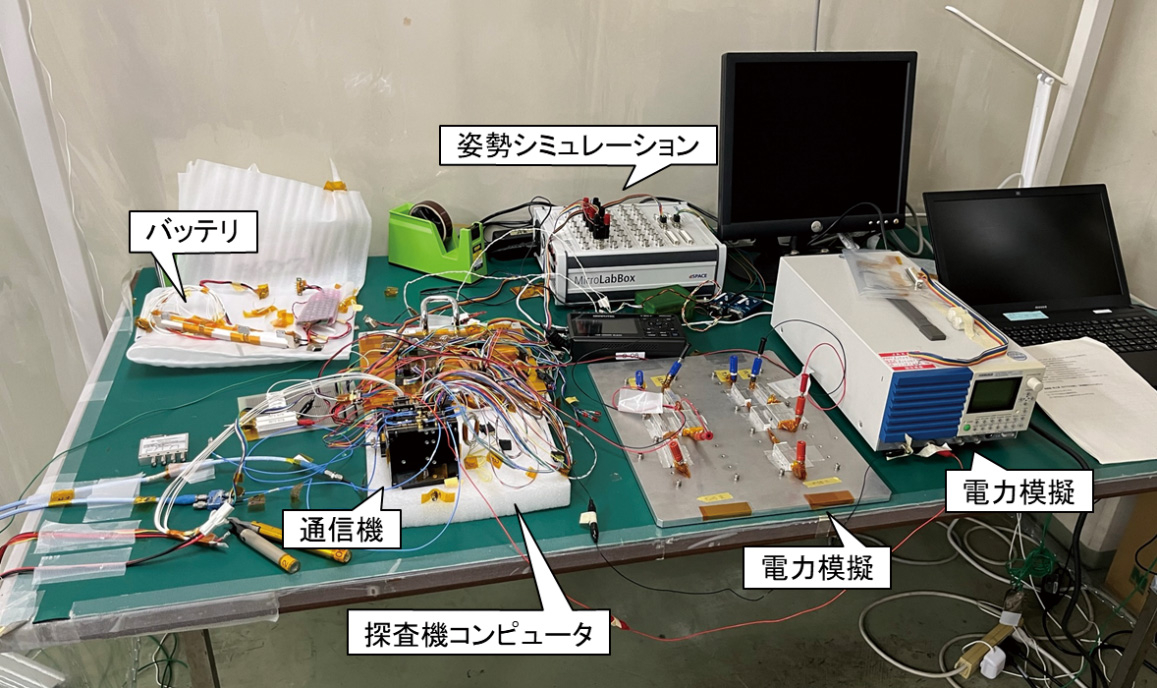
図2 (上)GSTOSの運用画面 (下)探査機シミュレータ
本項執筆時点で、SLSロケットの打上げは2022年3月の予定となっています。現在、両探査機の運用に向けて、地上運用設備の整備、運用手順の確認、運用訓練などを実施しています。ミッションの成功に向けて、応援よろしくお願いします。
※1 地上から送信した電波が探査機で折り返されて返ってくるまでの時間から距離(Range)を計測し、送信した電波と受信した電波の周波数変化から速度(Range Rate)を計測する技術。ISASニュースNo.415(2015.10)参照
※2 距離的に離れた複数の地上局で、探査機からの電波と電波星からの電波を交互に受信することにより、その電波遅延量から探査機の位置を精度良く求める技術。ISASニュースNo.421(2016.4)参照
【 ISASニュース 2022年1月号(No.490) 掲載】