
OMOTENASHIのミッション
今月はもう1つの探査機OMOTENASHIの紹介です。OMOTENASHI(Outstanding Moon exploration TEchnologiesdemonstrated by NAno Semi-Hard Impactor)のミッションは、その名の通り、超小型探査機(CubeSat)による月面へのセミハード着陸の実証です。月まで航行するためのオービティングモジュール(OM)、月面接近時に減速を行うロケットモータ(RM)、着陸モジュールであるサーフェスプローブ(SP)の3モジュールで構成されています。
OMOTENASHIは打上げロケットから分離して約1日後、月衝突軌道へ自ら乗るため2ユニットのリアクションコントロールシステム(RCS)により最初の軌道制御を実施します。その後、月面衝突の数分前に着陸準備シーケンスに入り、RMによる減速(秒速2.5km分)時の姿勢安定のためRCSを使用してスピンアップを行います。探査機全体を月面に着陸させるには大きな推進系が必要で、CubeSatの限られたリソースでは困難です。そのためOMOTENASHIでは月面到達直前にRMを点火すると同時にOMを分離してRM+SPだけ着陸させます(図1)。減速させる質量を減らすことで超小型でも月着陸が可能となります。SPにはクラッシャブル材を搭載しており、着陸時にかかる衝撃も低減させます。探査機の合計サイズは12×24×37cm、質量は12.6kgと過去の宇宙機の中でも非常に小さく軽量です。
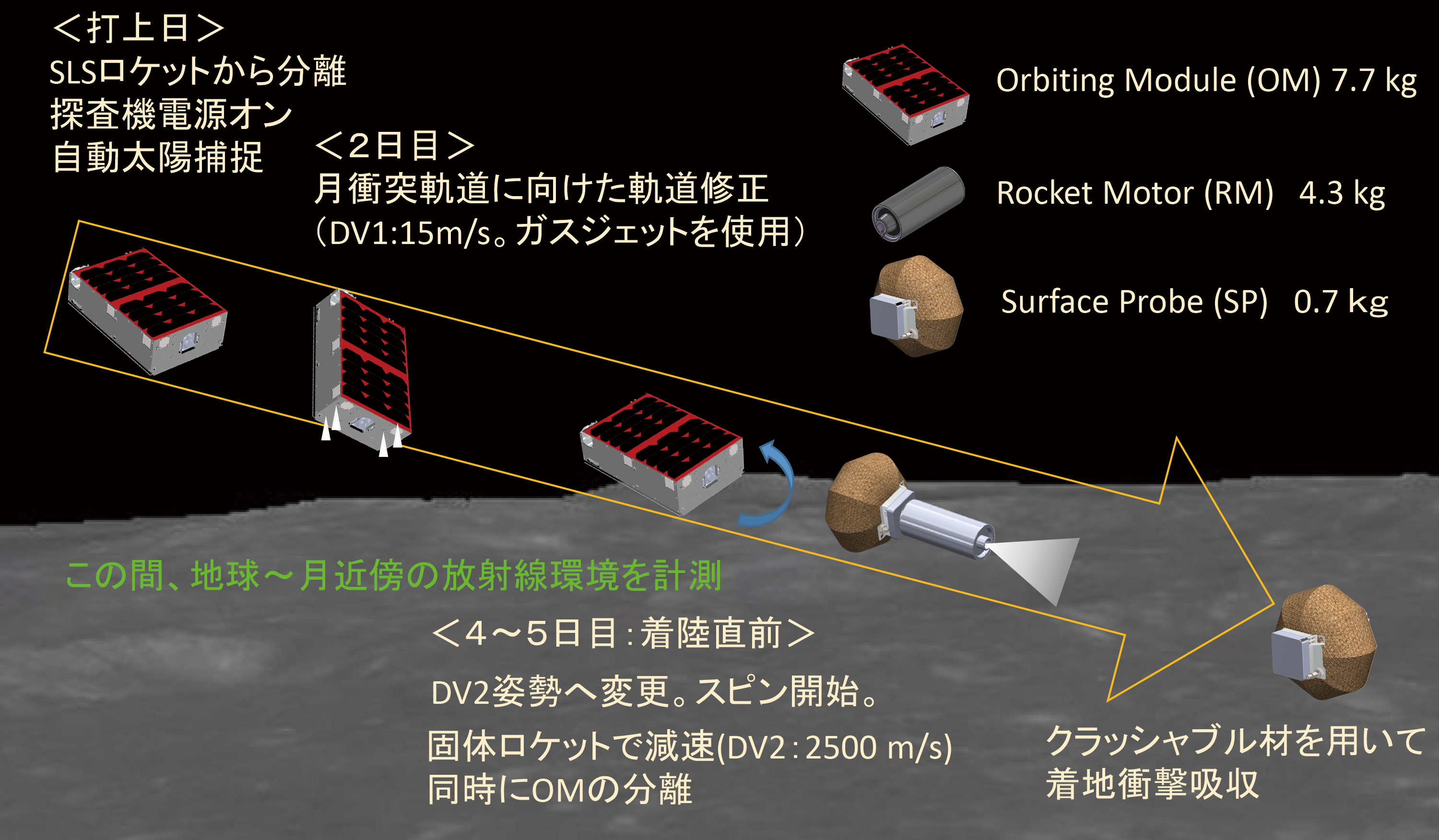
図1 OMOTENASHIのミッションシーケンス
OMOTENASHIの機器構成(図2)
探査機を超小型化するためにはシステム的な工夫とともに、各機器を小型にする必要があります。OMの電源にはJAXA 研究開発部門が開発した高効率3接合薄膜太陽電池を使用しています。「ひさき」搭載NESSIE 実験および「こうのとり」6号機搭載SFINKS 実験の結果を反映して改良が加えられたものです。バッテリは厳しい安全基準が課されているため、NASAから支給された基準に合格したリチウムイオン電池を3直列で使用しています。通信系はPROCYONで搭載したX帯送受信機をさらに小型軽量化しました。また、アウトリーチ活動のため、アマチュア無線のUHF帯の発信器も搭載し、OMOTENASHIからの電波を世界各国のアマチュア無線家に受信してもらう予定です。姿勢制御装置は世界中から最も小型のものを探しました。0.5U*サイズ、0.9kg の小型軽量でありながら、3台のリアクションホイール、4つの太陽センサ、3軸ジャイロ、スタートラッカを有しています。RCSもまた輸入品で、合計8基のスラスタにより、軌道制御、角運動量管理、並びにスピンアップを行います。推進剤としては安全性を考慮し、低圧、無毒、不燃性の液化ガスを使用します。観測機器は、地上用の携帯放射線線量計を改造したものを搭載しています。RMは直径110mm、長さ300mm程度、質量は約5kgのレーザ点火方式固体ロケットモータを開発しました。着陸モジュールであるSPは、リチウム金属1次電池、搭載計算機、UHF送信器、3軸加速度計を搭載し、UHF電波が着陸後も地上にて受信できることで、着陸成功を確認します。
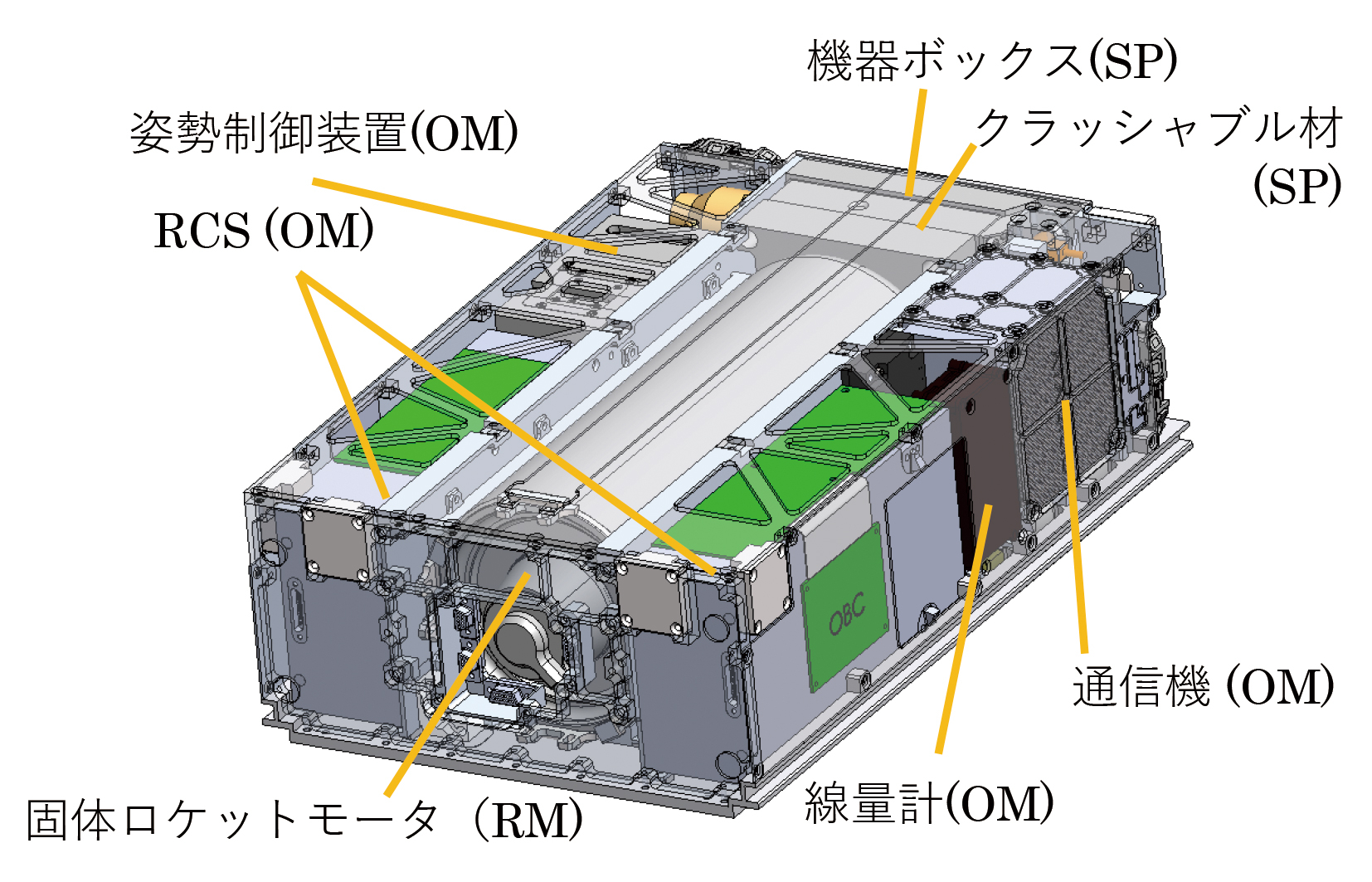
図2 OMOTENASHIの内部構成図
超小型、低擾乱の分離機構
OMとRM+SPの分離には、小型、軽量である2種類のノンエクスクローシブアクチュエータ(NEA)が使用されます。打上げ時の振動環境に対して強固に保持するためフランジボルトという比較的遅延時間の大きいNEAを用います。これを軌道上で動作させた後、分離の瞬間には数ミリ秒の遅れ時間で動作するピンプラーと呼ばれる別のNEAを使います。分離タイミングには50ミリ秒以下の非常に高い精度が求められるためです。その直後にRMにレーザ点火して固体ロケットモータの推進力を利用してOMを分離します。分離時に発生する外乱を低減させるため、OMとRMの間に板バネと固体潤滑を使った分離レール機構も採用しています。これらの分離機構は地上でのスピン分離試験にて機能を確認し、無重力空間のシミュレーションにより軌道上での分離外乱推定なども行っています。
* Uは超小型衛星のサイズを表す単位で約10cm×10cm×10cmの立方体のこと。OMOTENASHI探査機は6U。姿勢制御装置は5cm×10cm×10cmなので0.5U。
【 ISASニュース 2021年3月号(No.480) 掲載】