
深宇宙探査CubeSat EQUULEUS
EQUULEUS(エクレウス)は太陽ー地球ー月圏での実証・科学探査を目的とした6U CubeSat(約10×20×30cm)です。小型サイズながらパワフルな深宇宙探査機であり、図1に示す機器から構成されています。50 Wの発電能力を持つ太陽電池パドル、3軸姿勢制御を可能とする姿勢制御系コンポーネント、遠方から地球との交信を可能とするX帯トランスポンダ、軌道・姿勢制御用の推進系等の深宇宙探査機に必要不可欠な基本機器に加え、科学ミッションのために3つの観測機器を搭載しています。現在既にFM(Flight Model:実際に宇宙に打ち上がるモデル)は組み上げ済みで、米国への輸送間近です。
今回はEQUUELUSの工学ミッションおよび3つの科学ミッションを紹介します。
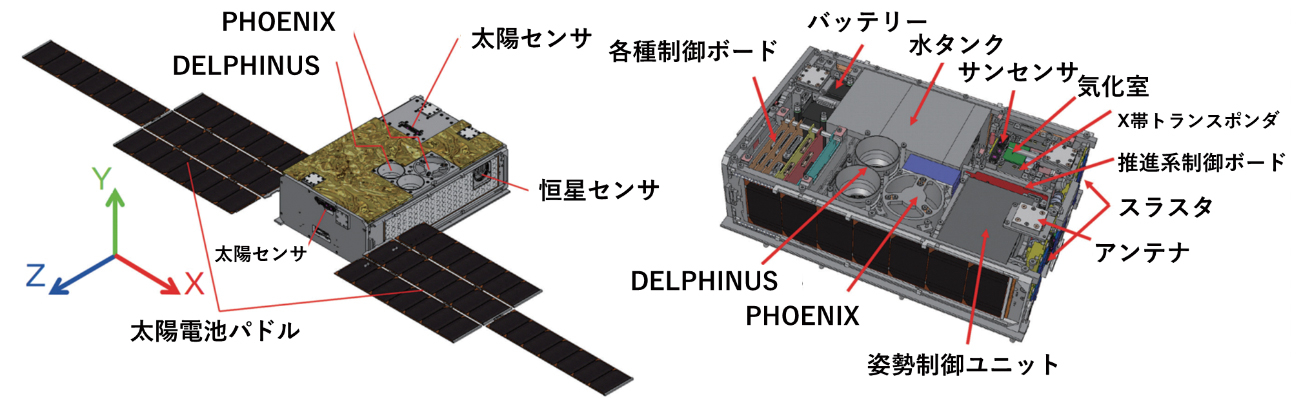
図1 EQUULEUSの外観図と内部機器配置
工学ミッション:太陽―地球―月圏での軌道操作技術の実証
EQUULEUSの主ミッションは太陽ー地球ー月圏における軌道制御技術の実証です。太陽や月の重力を利用する事で、リソース制約の厳しいCubeSatの軌道変換能力で地球ー月系のラグランジュ点(地球から見て月の裏側となるL 2点。以下、EML 2と呼称。)周りの周期軌道へ効率的に航行します。地球から約40万kmのこの周期軌道を目指し、約1. 2kgの水を推進剤(約80m/sの速度変化量)としたレジストジェット推進系AQUARIUS(AQUA ResIstojet propUlsion System)を用いて航行します。搭載推進剤の量は、過去の月・深宇宙ミッションと比べても極めて少ないですが、図2に示すように太陽や月の重力、複数回の月スイングバイを駆使し、燃料を節約し効率的に軌道遷移を行う事で余裕を持ってEML 2に到達できます。遺伝的アルゴリズムによる軌道維持の最適化もあり、最悪時でもEML 2に数ヶ月は滞在できます。
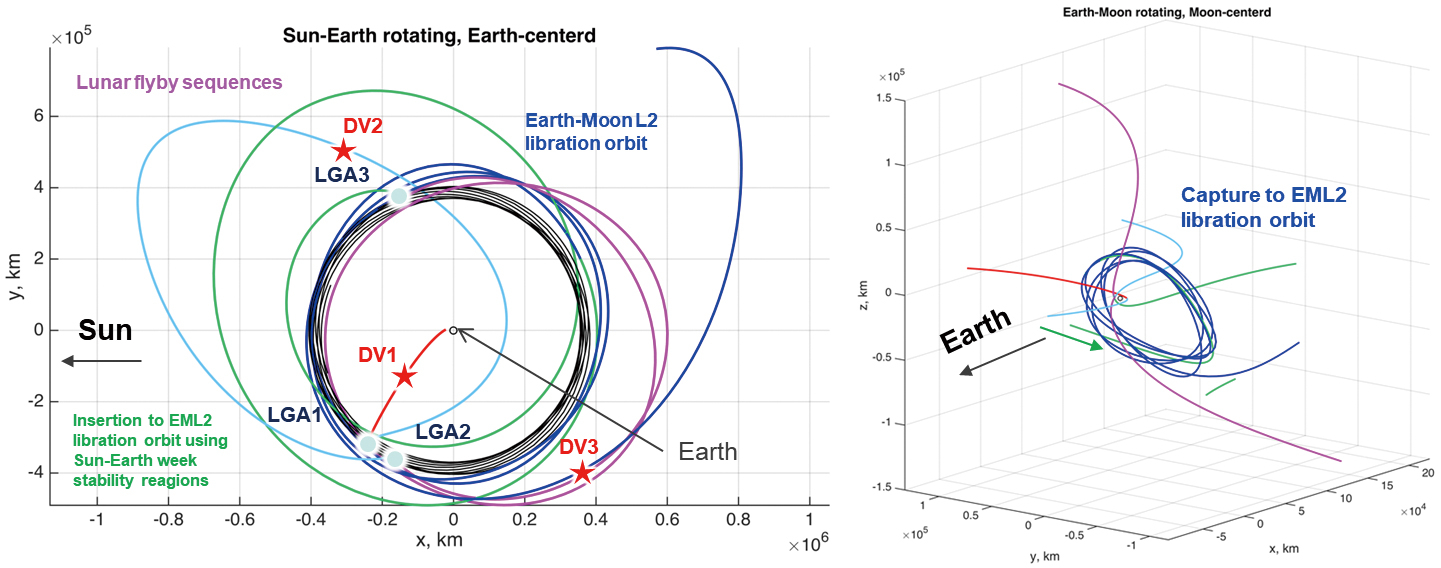
図2:EQUULEUSの軌道設計例(DV:スラスタ作動、LGA:月スイングバイ)
(左:地球中心 太陽―地球固定回転座標系、右:月中心 地球―月固定回転座標系)
また、上記に加え、SLS相乗り打上げゆえの困難があります。一般的に相乗り打上げの場合、打上げ日や投入される軌道条件は主衛星にとって望ましいものが選定されます。そのため、相乗り衛星はそれらが変わりうる不確定性の中でミッション達成を可能とする軌道設計・計画が要求されます。さらに厳しいことに、2021年の打上げを予定している現在でも、実際の打上げ軌道条件がまだ手元にありません。EQUULEUSの軌道は地球から出発する軌道とEML2から時間的に逆伝播した軌道とをうまく接続して設計しますが、予め巨大なデータベースを作成することで、大きな軌道条件の不確定性を抱えていても、その変更に対応して現実的な時間での軌道生成を可能としています。その他にも推進系のもつ不確定性を軌道制御および軌道決定計画によって補う等の様々な注意を払い、最悪ケース下でもミッションに支障がない事を検討・解析結果を示す事で担保しています。
3つの科学観測ミッション
EQUULEUSは3つの科学観測ミッションを予定しています。1つめは地球出発後、EML 2に到達するまでの8 ヶ月以上もの長い航行期間を活かし、プラズマ撮像装置(PHOENIX)によって地球の磁気圏プラズマの全体像を地球から離れた位置から極端紫外光で撮像します。
2つめはEML 2の周期軌道投入後に月裏面に衝突する小隕石の発する一瞬の光を閃光撮像カメラ(DELPHINUS)で検知する事により、月面に降ってくる小隕石のサイズや頻度を評価し、将来の月面上の有人活動やインフラに対する脅威を見積もります。比較的安定度の高く、日陰のない軌道に投入する事で安定して長期間観測できます。
3つめは地球から月軌道周辺までの空間におけるダスト環境の評価です。熱制御用に宇宙機に搭載する多層断熱材(MLI:Multi-Layer Insulation)の層間に、薄膜状のダスト検知センサを埋め込んだ、科学観測機器と衛星バス機器を統合したダスト計測器(CLOTH)により観測します。
超小型衛星による深宇宙探査
EQUULEUSはわずか約10kgのCubeSatですが、その深宇宙探査能力の高さを理解していただけたのではないでしょうか。現在、世界中でこのようなCubeSatのミッションが検討され、その活躍の場が広がりつつあります。ここで紹介した航行技術はそのような超小型衛星の活躍の場を広げ、多数の超小型探査機が深宇宙を航行・探査する世界の実現に貢献する事が期待されます。
【 ISASニュース 2020年12月号(No.477) 掲載】