
姿勢系の開発と聞くと、様々なセンサやアクチュエータを開発し、それらを使った宇宙機姿勢の制御アルゴリズムを開発することを思い浮かべると思います。EQUULEUSでは、開発行為の多くは既製品を用いることで外注され、姿勢制御系の上位に位置する自律機能設計が検討の中心でした。今回は姿勢系で既製品を利用することのメリットとデメリット、そしてDV 1運用という挑戦的な運用を成立させるために実装した自律機能について紹介します。
統合型姿勢制御ユニットの利用
姿勢系を設計するにあたって大きな制約となったのがサイズでした。複数のセンサやアクチュエータを別々に調達して配置するという通常の設計手法では6 Uという狭い空間に収まらないことを懸念し、Blue Canyon Technologies社の統合型姿勢制御ユニットXACT- 50を採用しました。XACT- 50は1U以内のサイズに姿勢制御に必要なセンサ・アクチュエータを備え、それらを用いた姿勢制御機能も有しています。従ってメインの搭載コンピュータは制御アルゴリズムを実行する必要がなく、目標姿勢などの高レベルな指令をするだけで姿勢制御機能を達成できます。基本的な姿勢制御機能は既に実証済みであり、プロジェクトで「車輪の再発明」をせずとも、より信頼性の高い姿勢制御機能を得ることが可能です。
このように既製品利用には多くのメリットが存在する一方で、開発がプロジェクトの制御下にないことによるデメリットも多く存在します。具体的な姿勢制御アルゴリズムの中身やソースコードは企業のアセットであり、詳細な共有が困難です。また、ミッションの要求から特殊なアルゴリズムが必要でもその実装ができなかったり、できても高いコストがかかります。さらにユニットの挙動再現のためにパソコン上で動くソフトウェアシミュレータが欲しいと思っても、EQUULEUSでは企業側から提供されたユニットシミュレータをプロジェクトで開発した探査機シミュレータと統合できませんでした。そこでEQUULEUSの挙動を再現する際には、XACT- 50のエンジニアリングモデルを用いたハードウェアシミュレータを使っています。
さらに、XACT- 50の内部挙動がブラックボックスであるため、FDIR( 異常検知・隔離・復帰)の設計に工夫が必要でした。階層型FDIRと呼ばれる設計フレームワークを用い、姿勢系コンポーネント異常などの下層の異常に対してはXACT- 50のソフトウェアが対処し、姿勢制御失敗などの上層の異常に対してはメイン搭載コンピュータが対処するという役割分担によって解決しました。
XACT- 50外観
DV 1運用を成立させるために
EQUULEUSでは、異常が発生した場合は三軸姿勢制御モードから太陽捕捉モードに切り替わり、宇宙機の最低限の機能以外を停止し、次の地上局との通信までバッテリー枯渇などの致命的な事象に陥らないように設計されています。
一方、打ち上げ直後には、「DV1運用」という長時間の推進系作動運用が計画されています。DV1運用の目的は、月へ向かう軌道からラグランジュ点に向かう軌道へ移行するために適切な幾何関係で月フライバイを行う事です。推力・燃料に制限があるため、打ち上げ後数日以内に軌道制御を終わらせる必要があります。このため、DV1運用中に異常を検知して太陽捕捉モードで留まると地上局が対応するまで貴重な時間が無駄になり、月フライバイまでに目標とする軌道制御が達成できなくなり、目標軌道への到達が難しくなる可能性があります。そこでDV1運用では、太陽捕捉モードに留まらずに自動で推進系作動状態まで探査機自身で復帰する「アグレッシブリセット」という機能を実装しました。
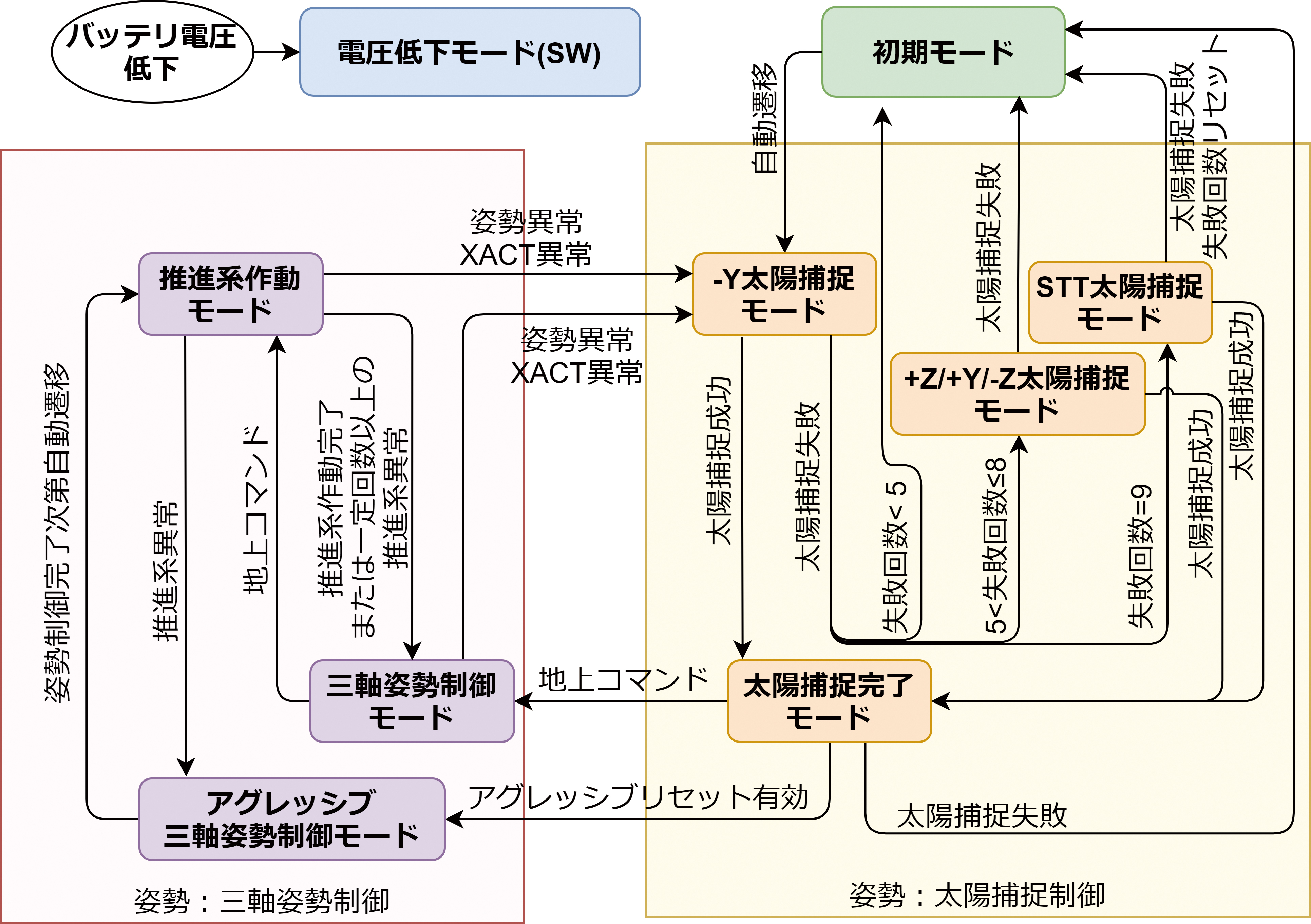
EQUULEUSの制御モード図(一部簡略化しています)
最後に
EQUULEUSの姿勢系開発は、既製品を用いるという新しい取り組みでした。設計の再利用性を高めつつミッションに応じてカスタマイズしたいという、衛星設計における相反する要求に取り組むための知見が得られたのではないかと思います。またDV 1運用は超小型探査機ならではの攻めた運用が要求され、ここでは紹介しきれない数多くの工夫によって成り立っています。無事成功することを読者の皆さんも祈ってください。
【 ISASニュース 2021年10月号(No.487) 掲載】