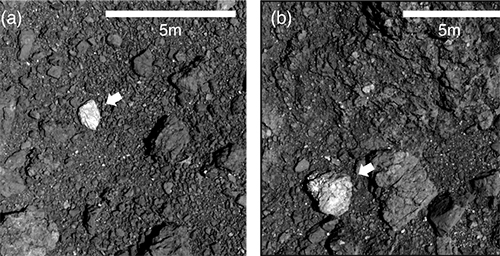
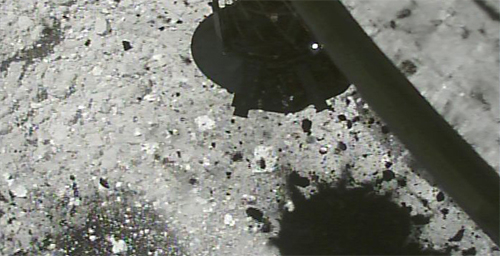
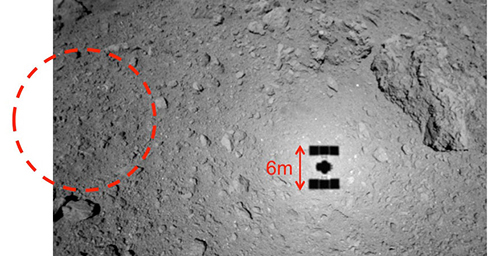
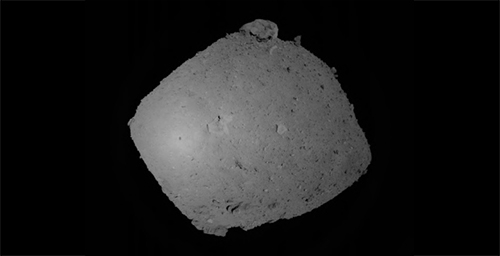
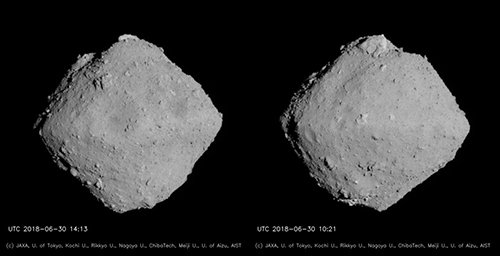
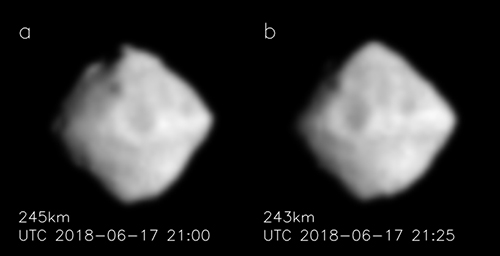
「はやぶさ2」は、6月27日に小惑星リュウグウ(Ryugu)に到着しましたが、その後、小惑星から約20km離れた地点(ホームポジション)に滞在して、リュウグウの観測を続けていました。高度20kmでホバリングをしていたわけです。そして、7月16日の週には、このホバリングの高度を下げるという運用を行いました。最終的には、高度が6kmを切るくらいまで下がりました。そのときに撮影した画像の1枚が図1です。

[オリジナルサイズ]
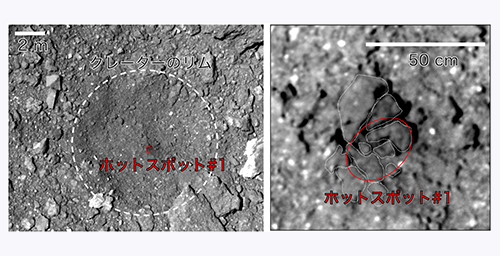
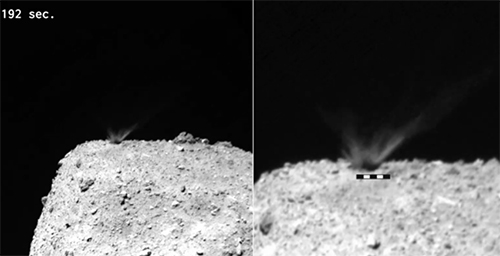
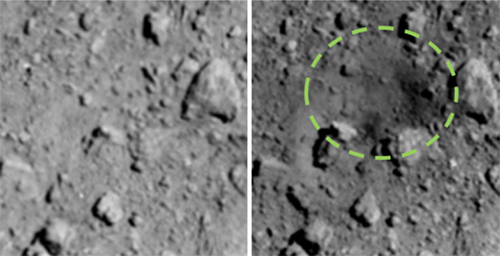
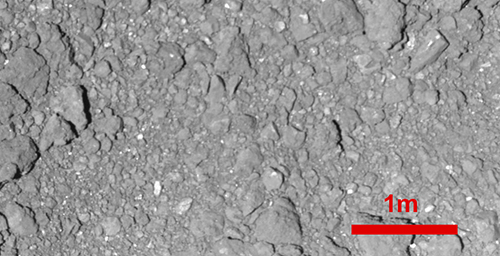
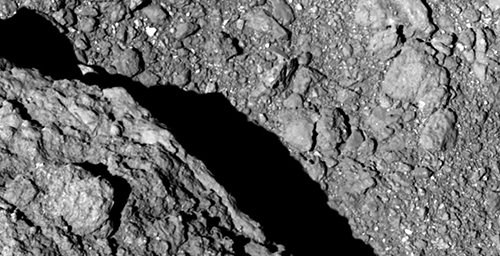
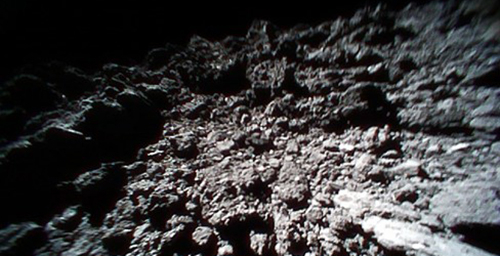
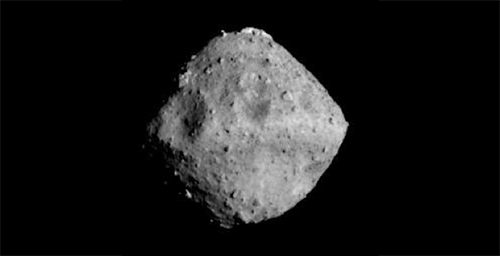
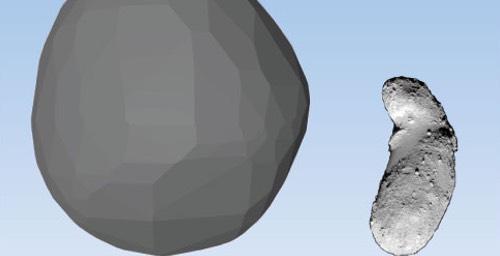
図1 高度約6kmから撮影したリュウグウ。2018年7月20日、16時頃(日本時間)に望遠の光学航法カメラ(ONC-T)によって撮影。
画像クレジット※:JAXA, 東京大, 高知大, 立教大, 名古屋大, 千葉工大, 明治大, 会津大, 産総研
※ 画像を引用する場合にはクレジットを記載してください。もしクレジットの短縮が必要な場合は「JAXA、東大など」と表記してください。
図1は、これまでホームポジションから撮影されていた画像(例えば、こちら)と比べると、解像度が約3.4倍上がっており、1画素が約60cmに対応します。画像中央付近にリュウグウ表面で最大のクレーターが写されていますが、"すり鉢"のような形をしていることがよく分かります。また、リュウグウの表面が非常に多数の岩塊(ボルダー)に覆われていることも分かります。この写真は、着陸地点を選ぶ上でも重要な情報となります。
今回、高度を下げた運用はBOX-C運用と呼ばれるものになります。はやぶさ2プロジェクトでは、BOX-A、BOX-B、BOX-Cというものを定義しています。図2にBOXの説明を示します。
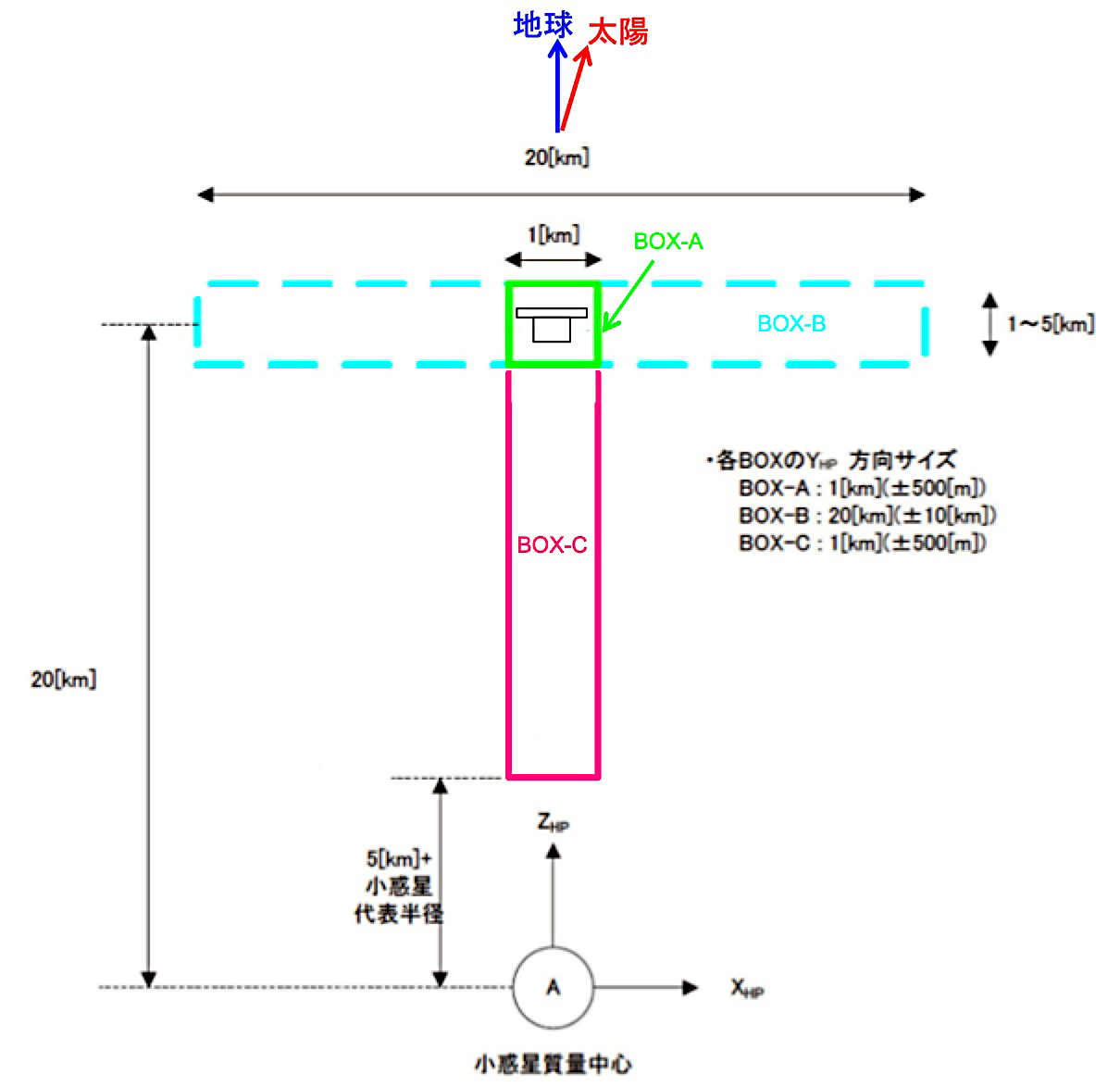
図2 BOXの定義。XHP、YHP、ZHPはホームポジション座標系。YHP軸はこの紙面に垂直で紙面の向こう側に向かう向きになる。
画像クレジット:JAXA
BOX-Aがホームポジションに対応するもので、高度が約20kmになります。BOX-Bは高度はBOX-Aと同じですが、前後左右に±10kmまで移動できる範囲になります。そしてBOX-Cは前後左右はBOX-Aと同じですが、高度を5kmくらいまで下げたところまで含む領域です。なお、ここでの座標系はプロジェクトで定義しているホームポジション座標系というものですが、定義は下の図3をご覧ください。重要な点は、Z軸は常に小惑星から地球方向を指すものになっているということです。
今回は、BOX-Cでの運用を行いましたが、7月17日からゆっくりと降下を開始しました。最低高度付近に滞在していたのは7月20日からの1日間です。この期間に観測を実施した後、7月21日に上昇を開始し、7月25日にBOX-Aに戻りました。
参考:ホームポジション座標系
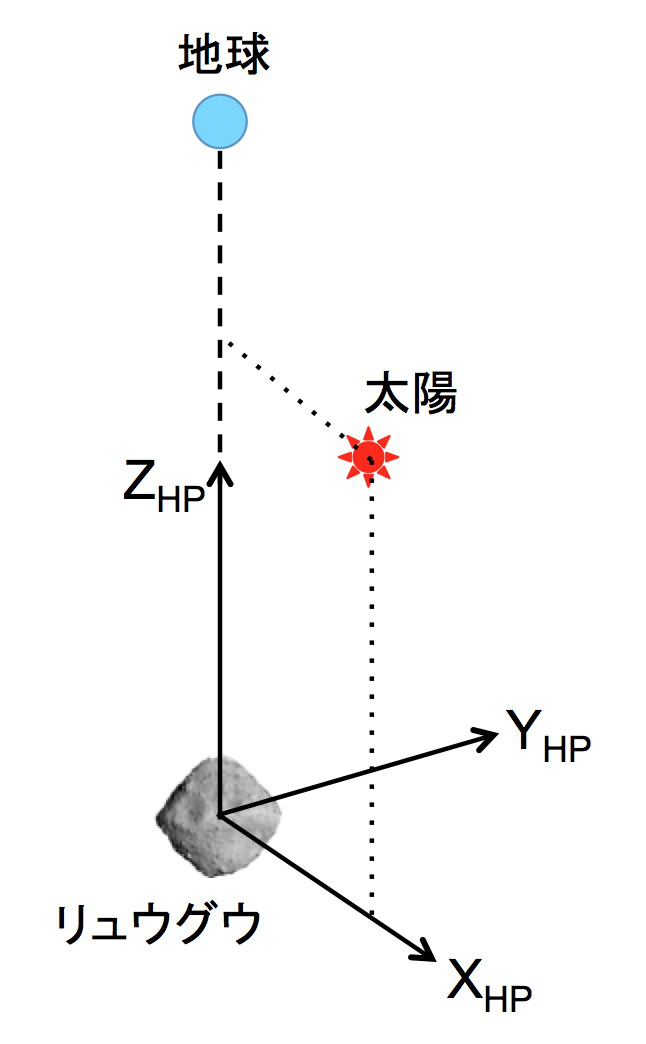
図3 ホームポジション座標系の定義
画像クレジット:JAXA