
MMXの大きな見どころの1つは何かと聞かれたら、「人類未踏の天体でめちゃカッコいいロボットが最高に大活躍するところ」と私は答えたいです。惑星探査機は学会などでRobotic Explorerとも訳されることがあります。これは、ミッションを実現するために技術的に複雑になったり自律性が高くなったりすることが多く、それ自身がロボットであるという側面を持っていることによるものです。MMXではサンプリング装置とローバという特にロボティクスを駆使した装置が2つも搭載されています。今回はこれらの行うミッションとそれを実現する技術に関して紹介しようと思います。
サンプリング装置(C-SMP):フォボスからサンプルを採取するロボット
サンプリング装置は文字通りフォボスからサンプルを採取する装置です。取得したサンプルを帰還カプセル(SRC)に収納するところまでを目的としています。マニピュレータを搭載したことで既存手法より確実にかつサイエンスに最適な場所からサンプルを採取することを狙っています。
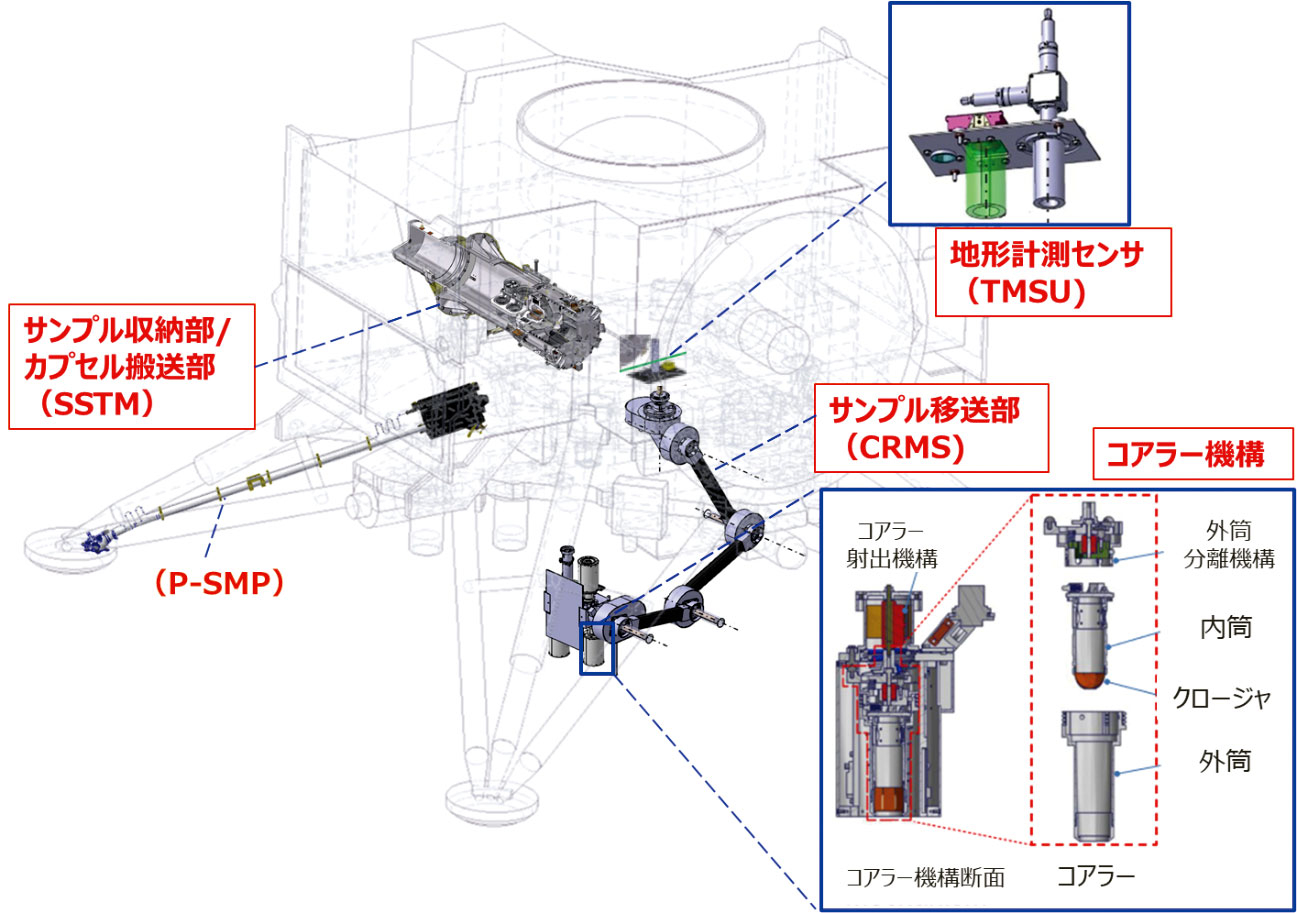
図1:サンプリング装置(C-SMP)の構成
構成としては、エンドエフェクタ(手先)にサンプルを採取するコアラー機構を3つ、小型光学カメラ、計測機器等を搭載した5軸関節構成マニピュレータ(ロボットアーム)によるサンプル移送部(CRMS)、探査機本体に搭載される地形計測センサユニット(TMSU)、これらを制御するコントローラ部(SMP-E)、サンプルをSRCに収納するサンプル収納/カプセル搬送部(SSTM)から構成されます。また、アメリカが提供するニューマティック式のサンプル採取機構(P-SMP)のサンプル格納キャニスタをSSTMに搬送する役目も担っています(図1)。
フォボス表面に着陸後、TMSUでの撮像画像を地球に送信して、半径1mサイズの地形に対して地表状態確認と3次元地形復元を行います。それに基づき安全にサンプル採取できる地点を2点(メイン及びバックアップ地点)選択し、サンプル採取実行のコマンドを探査機に送信します。C-SMPはそのコマンドを受け取った後は完全自律でサンプル採取を実行します。サンプル採取地点近傍までアプローチ後、地表の障害物有無や硬さを確認後にフォボス表面にコアラーを発射し筒を地面に打ち込むことで中に入り込むサンプルを採取します。コアラーは二重構造になっており外筒を地表貫入状態で分離させます。CRMSで地表から引き抜く時に内筒と外筒の間に仕込まれている板バネ仕掛けのクロージャが動作することでサンプルをコアラー内に閉じ込めることができます。その後、離陸衝撃に耐えられる姿勢にCRMSを移行させフォボスを離脱します。この運用を異なるフォボス上の地点で2回行う予定です。
フォボス離脱後の擬周回軌道(QSO)上にて、ターゲットマーカを用いた画像解析により、誤差1mmの精度でSSTM上に搭載された格納部にコアラーをアプローチさせ、エンドエフェクタから取り外します。すべてのコアラー及びP-SMPキャニスタを収納後、SRCにバネを用いた直動機構で搬送し蓋をします。以上でC-SMPのミッションは完了です。
MMXローバ(IDEFIX):探査機に先立ちフォボス表面を移動探査するロボット
探査機本体の着陸に先立ち、フランス(CNES)ドイツ(DLR)との国際共同開発のMMXローバ(IDEFIX)をフォボス上に着陸させ、100地球日の独立した探査を実施します。探査機本体に先立ちフォボス表面を探査することで、より確実な探査機着陸を実現するのが目的です。
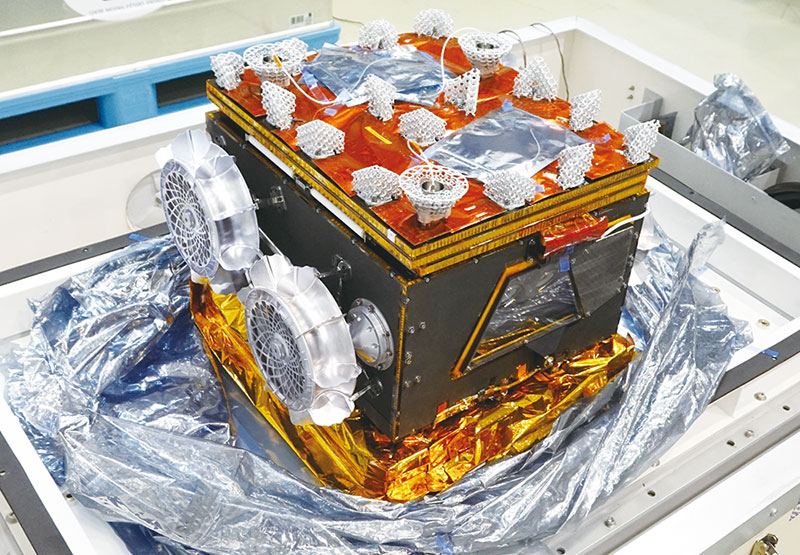
図2:MMXローバ(IDEFIX)の外観
IDEFIXはローバ本体が重さ約23kg、1辺約50cmの立方体形状で探査機の大きさと比較すると小型です(図2)。フォボス表面移動や姿勢制御のために、4つの独立に動作が可能なホイールが先端についたアームを制御します。アームは本体との連結箇所が回転する仕掛けになっています。ホイールを動かすことで前進したり、アームを動かすことで高さや姿勢を変えたりすることができます。科学観測機器として光学カメラ、ラマン分光計、熱放射計が搭載されており、フォボス表面科学に資するデータも取得予定です。探査機本体には、加えて分離機構(MECSS)、ローバ通信アンテナ(RolAnt)、データ処理装置(RolBox)も搭載されます。
基本的な運用としては、日中は太陽方向を指向する姿勢制御により発電量を確保します。また、探査機からの通信電波を受信すると取得データを探査機に返し、新たな運用計画コマンドを取得することになります。これはフォボスの昼夜問わず1地球日に2回実施します。その他の時間はシステム制約の許す範囲で表面移動や先に示した機器での科学観測を実施し、ミッションを行います。
余談ですが、IDEFIXという名前は欧州で有名な白い犬のキャラクターからつけられています。その意味は「ピン!とくる」というニュアンスだとのことです。日本名は「閃き」と日本ローバチームで名付けさせていただきました。フォボスで何か「ピン!」とくる成果を出してくれることを期待しています。
【 ISASニュース 2025年12月号(No.537) 掲載】