
日本時間2024年1月20日0時20分20.20 秒、内之浦局と臼田局にてLEV-1からの電波を受信しました(図1)。その約1.3秒前に、月面でLEV-1の背中に付いたパッチアンテナから発信された電波が地上に届いたのです。第9回では、SLIMから分離され月面で勝手に動いてSLIMをパシャパシャ、その活動結果と共にLEV-1とLEV-2を紹介します。
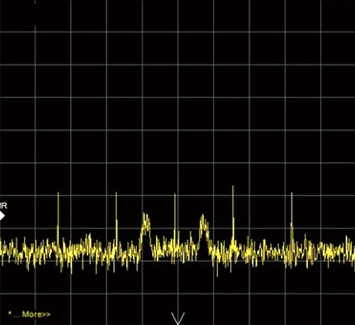
図1:LEV- 1 からのS帯受信電波の振幅スペクトル
LEVシステムは、日本初の月着陸機SLIMに搭載され、月の表層へ運ばれました。2023年9月の打上げから4か月の間、SLIM探査機本体がマルチバンド分光カメラエレキを通じて、電圧が低下したLEV-1の電池を30回にわたって充電してくれました。LEVシステムはLEV-M、LEV-1(図2)、LEV-2(図3)で構成されます。LEV-Mは2つのローバを月面へ展開する装置で、SLIM探査機本体の着陸直前自由落下開始時(同日0時19分50秒頃)にLEV-1とLEV-2をそれぞれを独立した状態で月面へ展開しました。
LEV-1 & 2は、低重力下での新しい移動方法や自律機能の工学実証を主ミッションとして、SLIM探査機本体の状況記録や着陸地点付近の岩石や地盤の産状記録(ISASニュース2024年2月号 表紙画像参照)を行いました。LEV-1はSLIM探査機本体からの分離展開成功の後、単一の車輪による姿勢制御から方位指向そして跳躍移動を連続して行い、その一連の動きを繰り返しました。その間、太陽電池で発電しながら画像記録や温度計測等環境状態の観測を試みています。LEV-2は展開後、SLIM探査機本体を探し出し、その姿を撮影、LEV-1へ2回分の画像データを送りつつSLIM探査機本体周りを走査し続けたと推測されます。LEV-1は、LEV-2の状態や撮像画像含めた記録データをSLIM探査機本体を経由せずに直接地球へ送信し、臼田と内之浦の地上局でその電波を受信することができました。
これらの活動により、LEV-1 & 2は同時に日本初の月面探査ローバとなり、LEV-1は世界初の跳躍移動型探査ローバ、LEV-2は世界最小・最軽量の月惑星探査ローバになりました。また、LEV-1 & 2の一連の行動が地球から人間が介在することなく自律で行われたこと、月面におけるLEV-1 & 2のローバ間通信を成功したことも世界で初めて実証されました。さらに、アウトリーチ活動としてLEV-1が発信したUHF帯の電波が地上に届き、世界初の月面アマチュア無線局となりました。跳躍移動を7回繰り返した後、同日2時10分に海外のアマチュア無線家がLEV-1からの電波を受信して以降、理解できるデータが地上に届くことはありませんでした。
今回LEV-1 & 2が行った月面での活動により、小さなロボットでも「自立した月探査ができる」ということが証明され、将来の月惑星表面でのロボット活動の高頻度化につながる貢献ができました。最後に、世界の皆様からの熱いご声援、世界から届いた電波受信の報告は、次の探査ローバ開発への励みとなりました。心よりお礼申し上げます。
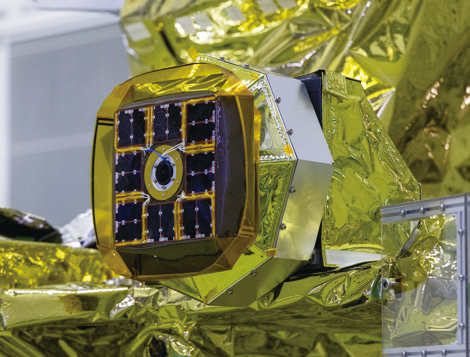
図2:SLIM打上げ前、SLIM探査機本体搭載状態にあるLEV- 1

図3:フライトモデル引渡し前、最終組立の計量時に収納状態にあるLEV- 2
【 ISASニュース 2024年5月号(No.518) 掲載】