
はじめに
次世代の宇宙探査はドッキングがキーテクノロジーの1つになります。これはいったいどういうことでしょうか。本記事では、東京科学大とJAXAが共同で開発を進めている深宇宙探査用のドッキング機構について紹介します。
次世代サンプルリターンミッションとドッキング
地球外天体へ赴き、その石や砂などその天体のサンプルを持ち帰る探査ミッションをサンプルリターンミッションと言います。古くはアポロ宇宙船が月サンプルを持ち帰り、前回1970年の大阪万博では米国館の目玉展示として大行列を作りました。近年では対象となる範囲も深宇宙(地球周回軌道よりも遠くの領域のこと)へ広がり、日本の「はやぶさ」「はやぶさ2」が小惑星の砂を持ち帰ったことは記憶に新しいことと思います。今後、火星や火星の衛星フォボスからのサンプルリターンも予定されており、宇宙探査の1ジャンルとしてますます発展していくことが期待されています。サンプルリターンミッションの特徴として、目標となる天体に接地してサンプルとなる石や砂を収集する必要があるという点が挙げられます。これは一歩間違うと探査機が地面に衝突するなど破損のリスクを伴う危険な作業です。「はやぶさ2」では、1度目のサンプリングに成功したあと、2回目のサンプリングを行うかどうか慎重に検討されました*1。
もし、2回目のサンプリングのための着地に失敗した場合、1度目に採取できたサンプルも失うことになってしまうのです。最終的には2回目のサンプリングはリスクを越える大きな成果が期待できることから、十分な準備の末、見事成功しました。しかしできることならば、このようなリスクは避けたいところです。現在JAXAを中心に検討がされている次世代のサンプルリターンミッションでは、これを親子型の探査機を用いることによって解決しようとしています。探査機を航行専門の親機と着陸・サンプリング専門の子機に分けるのです。両機はドッキングした状態で探査対象の天体に向かい、目標天体の周回軌道に入ったのち、親機から子機が分離され、子機だけが天体表面に接地し、サンプルを採取します。その後、親機まで戻って再ドッキングし、採取したサンプルを親機に渡します。子機から親機にサンプルを渡す手間が増えましたが、サンプリングによって地球へ帰還する機能を喪失する心配はなくなります。これはかつてアポロ宇宙船が取っていた方式でもあるのですが、これを無人で、かつ深宇宙で行おうというコンセプトです。さらに将来は燃料補給機などともドッキングして探査機を再使用するといった「深宇宙OTV(Orbital Transfer Vehicle, 軌道間輸送機)」へ発展させようという検討もなされています*2。
*1 https://www.hayabusa2.jaxa.jp/topics/20190708_PPTD_approach3/
*2 https://www.isas.jaxa.jp/home/research-portal/people/2023/0727/
深宇宙でのドッキング
上記の次世代探査機の実現に欠かせない技術が「ランデブー・ドッキング技術」になります。これは宇宙機同士が接近(ランデブー)し、結合(ドッキング)して一体化するという技術で、上記のアポロ宇宙船を始め、現在でも宇宙ステーションへの人員や物資の輸送において日常的に行われています。それでは、この技術をそのまま転用すれば良さそうですが、そう簡単な話ではないのです。まず、危険のある作業ですので、人が操縦・または監視することが望ましいです。これまで実現している宇宙でのドッキングのほとんどは有人宇宙船同士や、片方に宇宙飛行士が搭乗しているケースになり、無人で行われたケースも地球近傍で地上局から常時監視ができる状況でした。しかし、深宇宙探査機、特に日本が推進するような比較的小さな探査機では無人が大前提となります。通信による監視についても、深宇宙となると程度に差はありますが、例えば火星ですと光(電波)でも往復で数分から数十分かかる距離になりますからリアルタイム監視ということは不可能になります。よって完全自律でドッキングを完了させる必要があります。
また、ドッキングをするには専用の連結機構とそれを動かすモータなどのアクチュエータが必要です。探査機の体積と重量はロケットの能力やコストによって大きく制約を受けており、その中でドッキング機構に割り当てられる分、本来探査のために必要な機器や燃料が減ることになります。したがって、できるだけ軽量・コンパクトな機構とすることが望まれます。従来の物は深宇宙探査機に提供するには大きく重く、深宇宙探査機用のドッキング機構はまだ確立されていないため、東京科学大学ではJAXAと共同で新しいドッキング機構の開発に取り組んでいます。
ドッキング機構に求められる要求
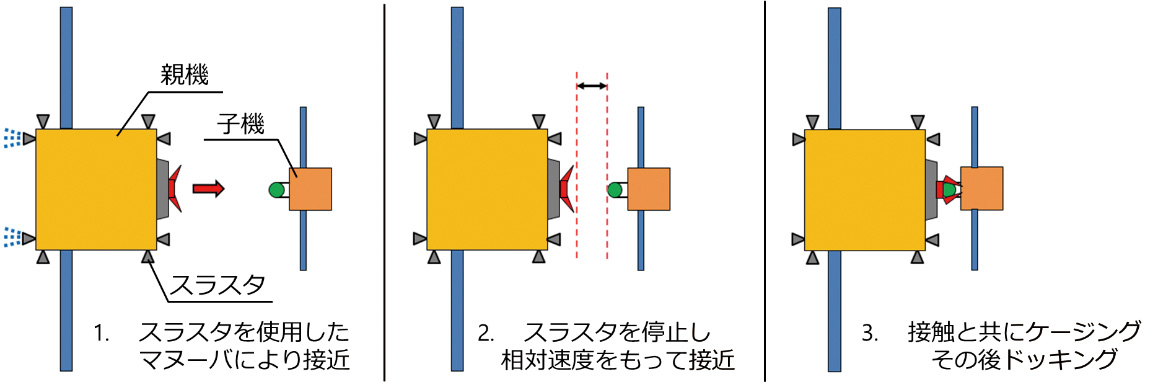
図1:想定する探査機のドッキングシーケンス
本ドッキング機構は、図1のようなドッキングシーケンスを想定しました。まず、親機と子機がドッキング可能な相対位置であることを確認したのち、親機が接近を開始し、ある距離まで接近したらスラスタ噴射を停止して慣性運動により子機に接触、そのままドッキングするというものです。
本機構の開発に当たっては、上記のシーケンスを実現するため、以下の要求を設定しました。
- 十分な位置・姿勢誤差を許容できること
- 接触時にお互いを突き飛ばすことなくドッキングできること
- ドッキングを完了後は、いつも同じ位置・姿勢で子機が固定され、外力によって固定が解除されないこと
- ドッキングの解除、再ドッキングが可能であること
- ドッキング時以外に勝手に動作しないこと
- 宇宙空間で使用可能な材料を使用すること
まず要求1については、完全自律での接近であることや、探査機に搭載できる推進系、センサ系の制約から、親機と子機が少しずれて接触することが考えられ、そのずれを許容してドッキングする必要があります。要求2はドッキングの際に親機と子機の接触が生じますが、その接触力によってドッキング前に互いが弾かれて離れてしまうリスクがあります。したがって、接触力を抑えるか、接触力で離れる前にドッキングを行う必要があります。要求3はドッキング完了後にサンプルの受け渡しを行う必要がありますから、受け渡し機構(ここではロボットアームのようなもので受け渡すことを想定しています)がサンプルに確実にアクセスできる位置・姿勢に固定されていないといけません。また、ドッキング中に軌道変換などで加速度がかかることがありますから、その慣性力で固定が解除されてもいけません。要求4については、子機がサンプルを親機に受け渡した後、再びサンプリングに向かうための要求です。要求5、6については宇宙用機器としての要求となります。
スペースデブリ捕獲機構から生まれたドッキング機構のコンセプト
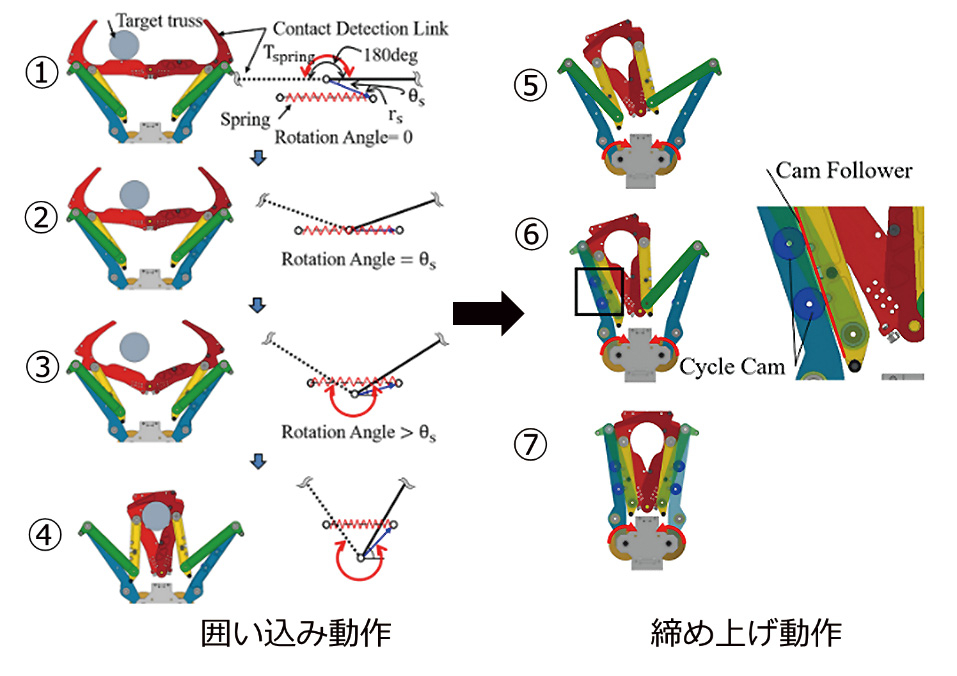
図2:ドッキング機構の動作原理
上記の要求を満たしうる機構として、私たちはスペースデブリ捕獲用として開発していた爪型ハンド機構に着目しました。この機構の基本原理は図2のようになっており、スペースデブリ上の棒状の構造(図では紙面奥行き方向に延びていて断面が記載されています)を把持する目的で考案されました。図中の各リンクは青いリンクの下側の関節を除いて自由回転する関節で接続されています。赤いリンク(接触検知リンクと呼んでいます)は左右のリンクが関節でつながっており、180°(左右のリンクが直線状態)から0°(下に凸の形状に折れ曲がった状態)まで稼働します。この左右をつなぐ中心の関節の少し下にばねが取り付けられています(図2①の右側模式図参照)。このばねは2つの接触検知リンクがまっすぐの状態(図2①)のときはリンクを広げる向きにトルクを発生していますが、関節が曲がりばねが関節よりも上になると(図2③)、より関節を曲げる向きにトルクの方向が変わる仕掛けになっています。この性質を利用して、図2①では爪が開いた状態が維持され、把持対象が接触検知リンクに触れるとその接触力でリンクが押されてばね力が爪を閉じる方向のトルクを発生し、ただちに爪が把持対象を囲い込んで逃げられないようにします(図2④)。このとき、黄色と緑のリンクが自由に動くことによって把持対象の相対位置に合わせて爪が移動します。これによって、広い範囲で把持を可能とし(要求1)接触による突き飛ばしを防ぐ(要求2)ことができます。しかしこの状態では、把持対象は把持機構から離脱することはありませんが、固定はされていません。そこで、次に図2の青いリンクの根元関節をモータによって回転し把持対象を囲っている爪を把持対象ごと中心部に移動させ固定します(図2⑤~⑦)。モータと関節の間にはウォームギアというバックドライブしにくい歯車が入っており、把持対象側からの外力によって爪が押し広げられないようになっています(要求3)。固定した状態からモータを逆回転させて青いリンクを開くことにより、爪も開き、ドッキングの解除と、図2①の状態へと戻ることが可能です(要求4)。また、詳しく説明すると長くなるのでここでは省略しますが、各リンクの重心の位置をうまく調整することにより、図2①の状態で大きな加速度が作用してもリンク自身の慣性力によって勝手に爪が閉じることはありません(要求5)。さらに、これらの機構は全て金属材料で実現可能ですので、宇宙空間でも使用可能です(要求6)。
ドッキング機構の設計
上記の機構により要求はクリアできそうです。しかしまだ問題はいくつかあります。この機構はもともと棒をつかむための物であり、固定も摩擦が期待できないとすると、棒の軸方向の移動と軸周りの回転は固定できません。したがってそれらも固定可能な形状に拡張する必要があります。私たちは、これを実現するドッキング機構をいくつか検討しています。ここでは、その中の1つである三つ爪型ドッキング機構を図3に示します。これは爪を等角度で3つ配置した構成で、子機側に取り付けた三角形のハンドルを把持します。こうすることで、3次元の並進・回転方向全てを確実に拘束できるようになります。この構成でのドッキングの流れは図4に示します。基本的に図2と同様のシーケンスとなっていますが、3つの爪がそれぞれ別のハンドルに掛かるという点が異なります。3つの爪から中央部に向かってそれぞれ接触検知リンクが伸びており、中央部の紫のリンクにそれぞれ連結しています。この連結している関節に図2と同様にそれぞればねが搭載され、接触から素早く囲い込みに移行する動作を実現しています。図5に空気浮上装置で二次元的に宇宙空間での運動を模擬したドッキング実験の様子の例を示します。これは、機構が完全に正対した状態から約10cm、10°ずれた状態で子機が接触したケースですが、接触後にただちに囲い込みが成立し、その後固定状態にすることができています。また、これらの機能を軽量・コンパクトに実現するという点においては、今回紹介した試作機はまだ打上げ環境に耐える仕様とはなっていませんが、図3に示す寸法、重量となっています。最終的には、寸法はそのまま、重量は10kg未満とすることが目標です。これは想定している探査機と同程度のサイズで過去に地球近傍にてドッキングを行った無人宇宙機の機構と比べて、寸法は2/3、重量は1/3程度になります。
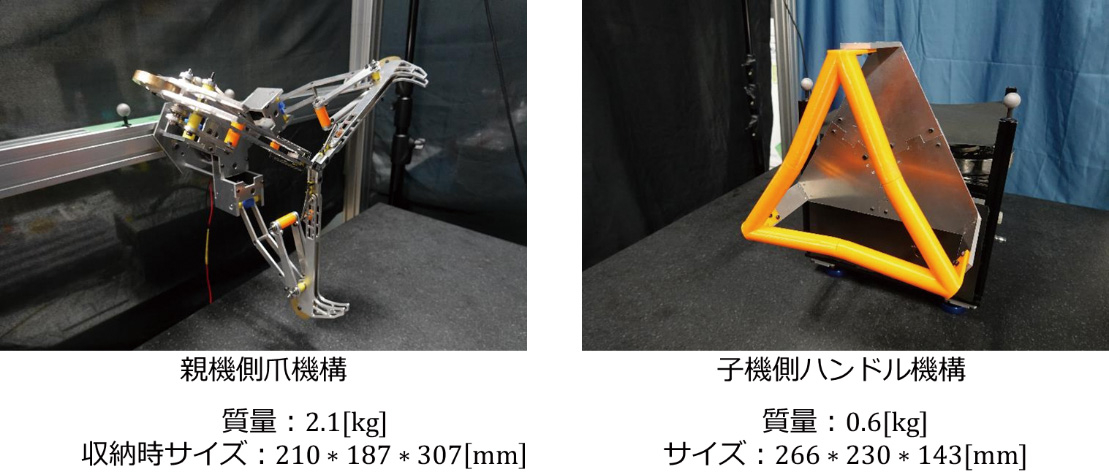
図3:試作した三つ爪型ドッキング機構

図4:ドッキング機構の動作
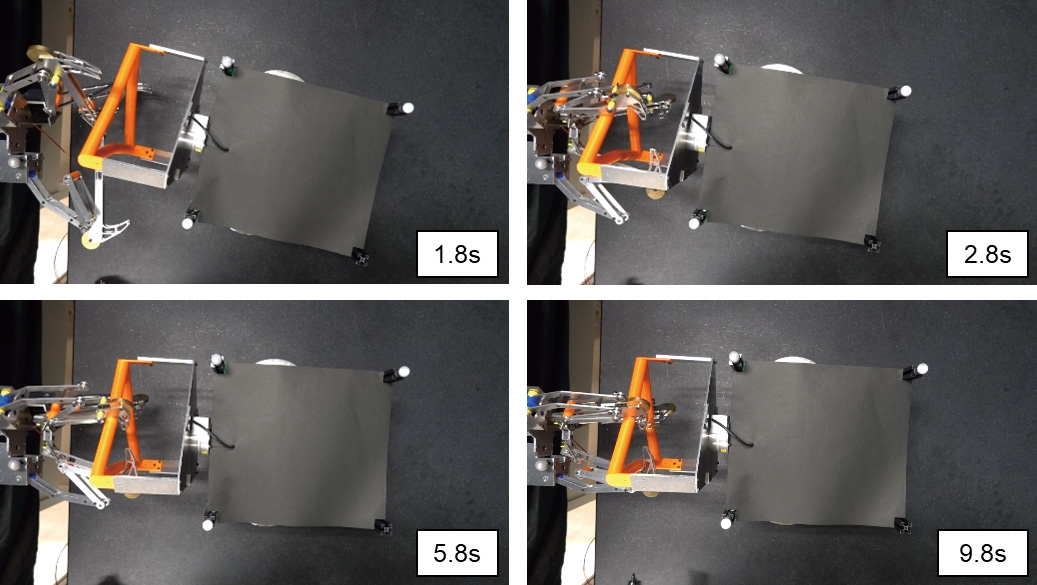
図5:空気浮上装置によるドッキング実験の様子
おわりに
本記事では、東京科学大学とJAXAで共同開発中の次世代サンプルリターン探査機向けのドッキング機構について紹介しました。現状では、大きくずれた子機とも確実にドッキングできる性能を確立できましたが、解放する際に子機の姿勢が乱れる問題や、宇宙空間に長く置かれた場合の耐久性、もっと軽量・コンパクトにできないかといった課題があり、それらを解決できる新しい機構を検討しています。この機構が深宇宙で活躍する日を楽しみにしていてください。
【 ISASニュース 2025年7月号(No.532) 掲載】