
はじめに
世界初の長周期彗星探査を実施するComet Interceptorは、2029年に打上げ予定のESA主導のミッションであり、親機Aと2つの子機(B1およびB2)の計3機による同時多点フライバイ観測を通じて、太陽系形成初期の始原的な特徴を残す長周期彗星(公転周期200年以上)のその場での観測を目指しています[1]。このうち、子機B1をJAXAが担当しており、探査機システムの開発はアークエッジ・スペース社が行っています。(親機Aおよび子機B2はESAが担当)。
長周期彗星は、始原天体探査としては極めて重要なターゲットである一方、"長周期"という特徴から、探査ミッション設計において「いつ」、「どこから」、「何が」来るかが予測できないといった難しさを伴っています。「いつ」来るか分からないため、来てから打ち上げるのでは間に合いません。そこで、Comet Interceptorミッションでは、探査機を予め打ち上げ、地球 - 太陽のラグランジュ点(L2)周りのハロー軌道に待機させ、地上から探査可能な長期彗星を観測したらL2を出発し、長周期彗星をフライバイ・観測する、いわば待ち伏せ作戦を取ります。さらに、「どこから」「何が」来るか分からないという不確かさが、ミッション設計、特にフライバイ撮像に関する航法誘導制御系の設計を難しくしています。
本稿では、Comet Interceptor子機B1における親機と分離した後のミッションシーケンスを紹介し、フライバイ撮像に関する航法誘導制御系および可視光観測のための光学カメラ(NAC/WAC: Narrow Angle Camera / Wide Angle Camera)撮像に関する課題を示し、解決策と方針について議論します。
分離後の自律シーケンス
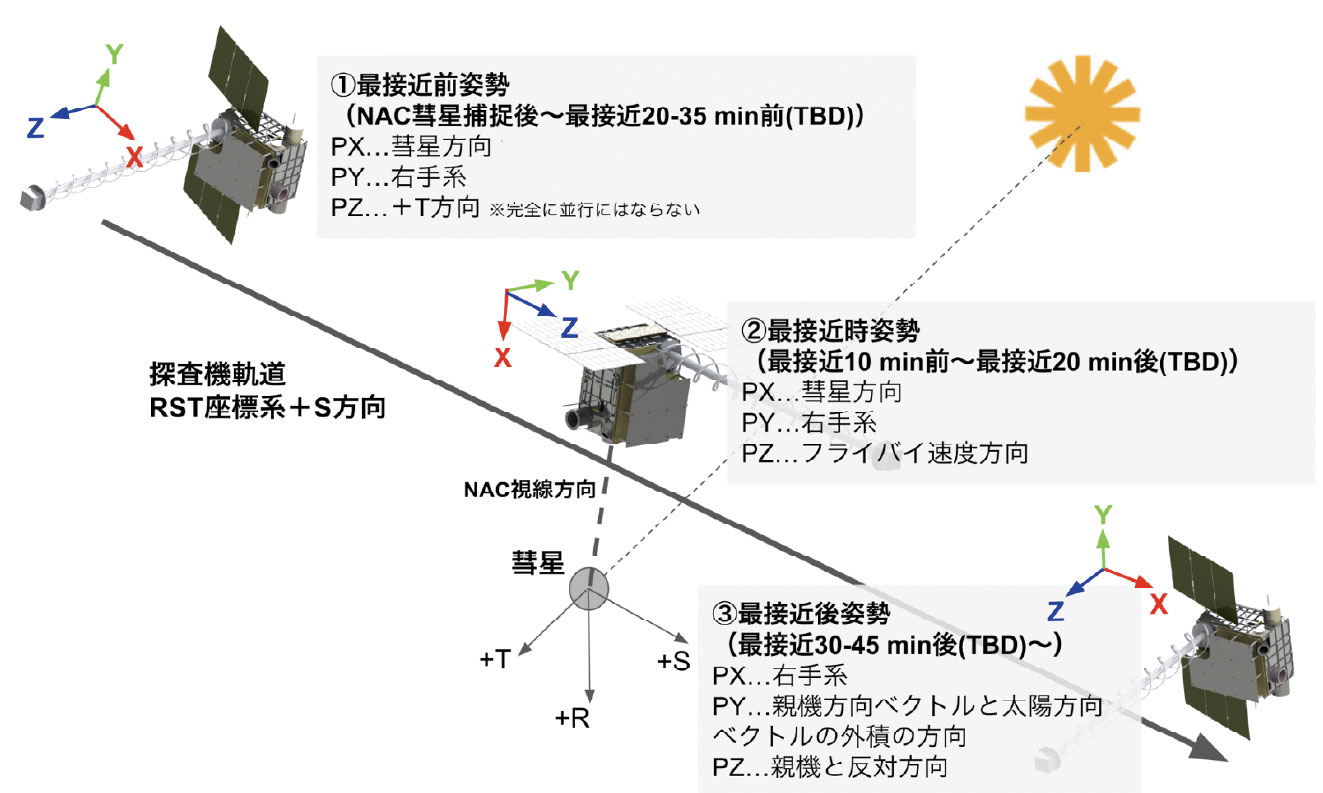
図1:Comet Interceptor子機B1の分離後運用シーケンス。
子機B1は、彗星に最接近するおよそ2 ~ 3日前に親機から分離され、弾道飛行を行います。図1に親機分離後のB1における運用シーケンスを示します。分離後、最初に太陽電池パドルの展開、デタンブリング(姿勢の安定化)、太陽センサーによる太陽捕捉、スタートラッカーを用いた三軸姿勢制御の確立を行います。その後、事前情報に基づきNACを用いた彗星探索・相対軌道決定を行い、子機B1は彗星指向姿勢を維持します(図1の①最接近前姿勢)。このとき、最接近時刻を推定し、精度よくフライバイ撮像を実施するための準備を行います。
最接近時刻の20分前(TBD:To Be Determined)になると、フライバイ姿勢(図1の②最接近時姿勢)に姿勢変更します。フライバイ時には、最接近時にNACの視野に彗星が入り、かつ彗星から発生しているダストから衛星を守るためにバンパー(防護板)が進行方向に来るような姿勢を取ることが重要となります。フライバイ姿勢移行後、視野の広いWACによる観測を行い、最接近時にNACの視野に彗星が入るように姿勢の微修正およびNACによる撮像時刻の決定を行います。そして、最接近撮像が完了し、彗星からのダスト衝突をやり過ごした後、親機との通信姿勢(図1の③最接近後姿勢)へと姿勢変更し、ステータス情報およびミッションデータを規定量親機に送信して停波し、運用終了となります。
分離後は親機からのコマンド送信ができないため、子機B1はすべて自律して(地上局を介して運用者が判断することなく)これらのシーケンスを実施する必要があります。ここで、航法誘導制御およびNAC/WAC撮像に関連する不確かさとして、彗星に対する相対速度のばらつき(10 km/s ~ 70 km/s)や衝突するダストの大きさや分布のばらつきなどがあります。したがって、Comet Interceptor特有の課題として、1)ワンチャンスイベントにおける完全自律運用、2)事前情報が少ない彗星に対するカメラ撮像、3)ダスト衝突に対するロバストな制御器設計、などが挙げられます。
ワンチャンスイベントにおける完全自律運用
推進系を持たない超小型衛星にとって、フライバイ観測のタイミングは一度きりの「ワンチャンスイベント」です。多くの衛星では、耐故障設計として故障を検知した場合、センサー冗長による切り替えで対応し、それでも解決できない場合はセーフ・モードに移行します。多くのセーフ・モードは、太陽電池パドルを太陽方向に指向して電力を確保するなど、最低限の機能を最低限のセンサー・アクチュエーターを用いて実施できるよう設計されています。その後、地上局の運用者が故障原因を特定し、修復することでミッションに復帰します。しかし、Comet Interceptorの子機は自律運用を行っており、これらの判断を運用者に頼らず、衛星自ら実施します。シーケンスによっては、セーフ・モードへの移行中に彗星を通り過ぎてしまうこともあり、そのため悠長に構えている暇はなく、腹を括って突き進む覚悟も求められます。
よって、Comet Interceptorの故障検知・隔離・回復(FDIR:Fault Detection, Isolation, and Recovery)設計では、セーフ・モードの考え方やワンチャンスイベントである彗星フライバイに対して最大限の成果を上げるために、a1)故障ケースによって諦めるミッションの優先順位、a2)事前情報を信じるか観測から得られた情報を信じるかといった重み付け、a3)ワンチャンスイベントを逃さないための腹を括るタイミング、などを考慮する必要があります。さらに、複雑なシステムは予期しない誤検知や検証漏れを引き起こす可能性があるため、シンプルで確実なFDIR設計を行うことが望ましいです。このような観点から、現在詳細なFDIR設計を進めています。
事前情報が少ない彗星に対するカメラ撮像
分離前に親機を介して、子機は彗星の位置・速度情報を受け取りますが、そこには大きな不確かさが含まれています。ワーストケースでは、再接近距離に750 km、最接近時刻には最大100秒の誤差が生じます。したがって、子機は分離後にNAC/WACを用いて撮像画像の中から彗星を特定(彗星同定)し、撮像画像に写る彗星位置情報から探査機の相対位置を推定(光学航法)することで、最接近時刻および最接近時の彗星方向を精度よく求める必要があります。彗星同定について、探査対象となる彗星は開発時点では分からないため、現時点では彗星の尾の広がりや彗星核の明るさを利用した方法、複数画像の比較、背景星を用いたマッチングなどが検討されています。また、光学航法では、彗星位置情報が同定できると仮定した場合、彗星位置の時系列データを用いて、探査機位置を拡張カルマンフィルタなどを利用した航法アルゴリズムによって精度よく推定することが可能です[2]。
Comet Interceptorミッションのハイライトとなる観測は、最接近時のNACによる高解像度の核撮像です。この最接近撮像において解決すべき課題として、b1)視野内に彗星を捉えるための撮像タイミング、b 2)高速フライバイ中の画像ブレ、などが挙げられます。これらの課題を解決するために、NACはCCD(Charge Coupled Device)駆動パルスの制御によって、2次元CCDでのTD(I Time-Delay Integration)撮像および多重露光撮像機能を実装しています。b1)については、光学航法によって対処しますが、例えば最接近距離850 km、フライバイ速度40 km/sのとき、NAC視野内を彗星核が横切る時間は0.7秒程度です。この精度で最接近タイミングをオンボード光学航法によって制約することは難しく、視野外で撮像してしまうリスクを低減する必要があります。そのためにNACには多重露光の機能を実装します。多重露光では通常の撮像のように露光してからすぐに電荷を読みだすのではなく、露光後CCD内に電荷を溜めたままにして次の露光を行うことを一定回数繰り返し、最後に読みだすことにより複数のターゲット像を1つの画像内に収める技術です。つまり、最接近時刻の誤差分だけ多重露光を繰り返すことで、どれか1つの露光タイミングでターゲットが視野内に入っていれば良い、というアイディアです。b2)については、NACによる彗星の適正露光時間は約5ミリ秒と見込まれており、上述の最接近距離・フライバイ速度の場合、露光中に13ピクセル程度被写体が移動します。TDI技術は、VCCD(Vertical CCD)内での電荷転送とCCDに結像した像の移動速度を同期させることにより、電荷転送と露光を順次行い、シグナルを増加させるとともに、S/N(信号対雑音比)を向上させながらブレを防ぎます。正しくTDI 撮像を実施するためには、ターゲットの移動角速度(フライバイ速度÷最接近距離)を正確に決定する必要があります。特に、最接近時刻および最接近時の角速度をオンボードで推定するためには、最接近姿勢移行後にも彗星が視野に入り続けるWACによる観測が重要です。これにより、分離前の情報をオンボードで更新するロジックの検討も進めています[3]。これらの技術を基に、適切なタイミングで、かつ適切なTDI および多重露光パラメータを用いてNAC撮像コマンドを実行する計画です。図2には、NACのTDIおよび多重露光撮像のシミュレーション画像の一例を示しています。
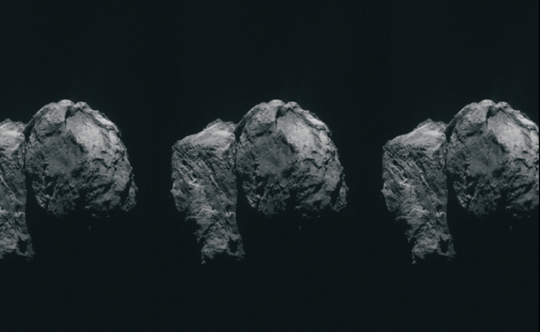
図2:NAC TDI +多重露光撮像のシミュレーション画像の一例。距離850km、相対速度40km/s、彗星核直径10kmを仮定した計算である。多重露光機能によって1枚の画像の中に複数の像が写る。それぞれの像の露光中のブレはTDIによって低減する。
ダスト衝突に対するロバストな制御器設計
彗星近傍には、彗星活動に起因するダストが分布しています。ダストの質量は非常に小さいものの、フライバイ速度が大きいため、衝突すると無視できないほどの姿勢外乱を引き起こします。進行方向にバンパーを取り付け、衛星本体を守る予防措置は講じていますが、ダスト衝突によって生じる角力積(角運動量の変化)により、c1)角運動量が蓄積され、c2)外乱トルクが発生します。子機B1の姿勢制御は、リアクションホイール(RW)による角運動量の交換によって行われます。c1)について、RWに蓄積可能な角運動量の上限は、選定されるRWのスペックによって決まります。そのため、衝突が予想されるダストのサイズ・頻度・分布を考慮した解析を実施し、想定される蓄積角運動量を求め、RWの選定を行いました。解析結果によると、進行方向軸周りに蓄積する角運動量は他の軸に比べて小さいため、進行方向軸のみ小さめのRWを選定しています。
次にc2)について、ダストによって発生する外乱トルクが衛星の姿勢を乱すため、カメラ撮像要求を逸脱させないよう、外乱にロバストな制御器の設計が必要です。想定されるダスト衝突を網羅的にシミュレーションし、適切な制御器ゲインのチューニングを行うとともに、外乱オブザーバを用いた制御応答の向上なども検討しています[4]。ダスト衝突の影響評価には、EDCM(Engineering Dust Coma Model)[5]という彗星までの距離に対するサイズ別ダスト数密度のモデルを使用しています。(図3) これにより、想定される彗星タイプ別にEDCMから得られるダスト径・密度・分布を計算し、c1)およびc2)の網羅的な解析に活用しています。
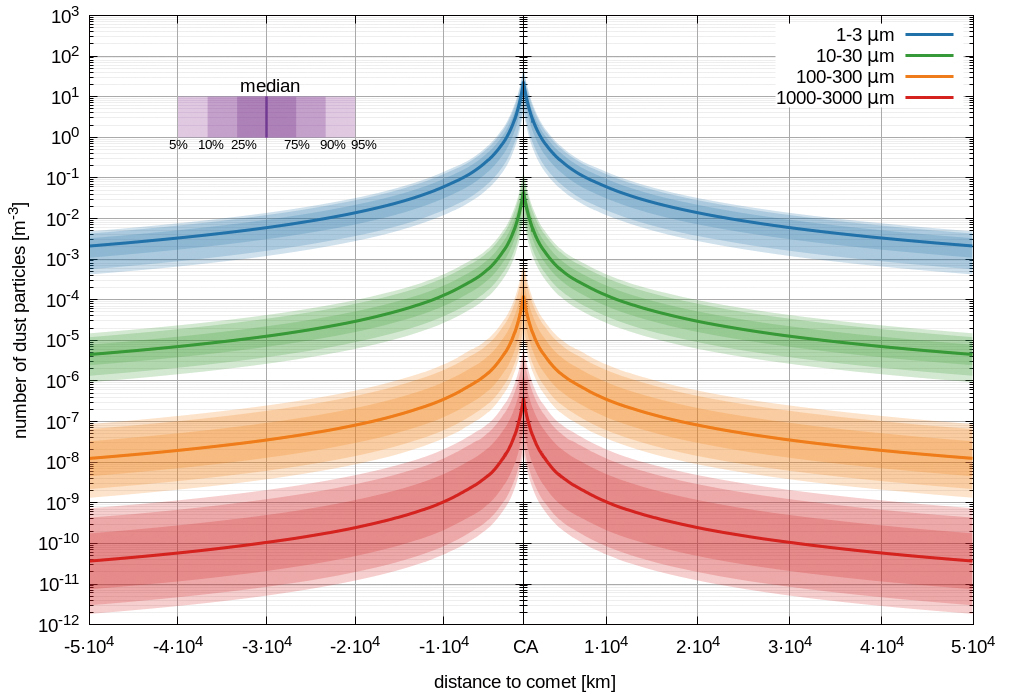
図3:彗星中心距離に対する探査機Aの軌道に沿ったダスト粒子の数[5]。
今後に向けて
今後は2029年度の打上げに向け、より忠実度の高いSW/ HWシミュレーション環境を構築し、各種パラメータのチューニング方法の検討や、詳細なFDIR設計、さらにFDIRを含めたEnd-to-Endでの検証など航法誘導制御の詳細な設計を進めていきます。そして、ヨーロッパでのインターフェース試験、インテグレーション試験を経て、2026年に探査機B1システムの開発が完了する予定です。
参考文献
[1] G. H. Jones et al., "The comet interceptor mission," Space Sci Rev, vol. 220, Feb. 2024.
[2] 藤原他, "Comet Interceptor B1 探査機における航法誘導制御系設計・開発," 第68回宇宙科学技術連合講演会, 4L16, 2024.
[3] 坂谷他, "Comet Interceptor B1 探査機搭載のカメラシステムによる超高速フライバイ撮像," 第68 回宇宙科学技術連合講演会, 4L12, 2024.
[4] 佐々木他, "Comet Interceptor ミッションにおける彗星フライバイ時のダスト衝突解析と航法誘導制御系設計," 第33 回アストロダイナミクスシンポジウム, 2023.
[5] R. Marschall, et al., "Dust hazard assessment using the engineering dust coma model of the comet interceptor mission," tech. rep., Copernicus Meetings, 2021.
【 ISASニュース 2025年1月号(No.526) 掲載】