
~手のひらサイズのロボットに詰め込んだ技術と思い~
はじめに
地球から約38万キロ離れた月面でLEV-2※1(愛称:SORA-Q)が撮影して送ってきた画像を見たとき、思わず「おぉ!」と声が出た。撮りたかったものはすべて写っていた。自分たちが開発したロボットが月に降り立ち、設計通りに動いたことが分かった瞬間だった。
始まりは、2018年4月。私は未だにこの仕事の始まりをはっきり覚えている。ちょうど新しい部署への併任が決まり、挨拶を兼ねて業務内容を相談しようと思って相模原キャンパスを訪ねた日だった。しかし、こちらの想定とは異なり、上司と先輩からは私の専門分野や希望はまったく聞かれず、ただ一方的に「タカラトミーが試作した小型ロボットをSLIMに搭載したいから、宇宙仕様化して」とだけ言われた。急に言われたからビックリしたし、心の中では「すげぇ軽く言うじゃん。大丈夫か、これ?」と思っていた。
自分が日本初の月面ロボットを作るチャンスを得たことにワクワクしたが、当然ながら不安もあった。しかし、幸いなことに、小惑星探査機「はやぶさ2」等で成功を収めた先輩たちが身近にいたので、「困ったら彼らに助けてもらえれば何とかなるだろう」と開き直ることができた。この記事では、そんな軽い気持ちでスタートしたLEV-2開発※2で苦労したエピソードや関係者の熱い思いを紹介する。
※1 正式名称 Lunar Excursion Vehicle 2。もう1台の超小型ローバLEV-1と共にSLIMに搭載され、日本初の月面ロボットとなった。
※2 JAXA宇宙探査イノベーションハブで実施したタカラトミー・ソニーグループ・同志社大学との共同研究により開発された。
球体から変形するロボットの誕生
開発を始めてすぐにワクワク感は打ち砕かれた。SLIMに搭載できるサイズや質量に制限があるため、要求がかなり厳しく、LEV- 2は直径80mm以下、質量300 g以下(最終的には約228 gで完成)に抑える必要があったのだ。当時、最新の試作機は直径100mm・質量300 gで、宇宙環境に耐えるための構造強化に加えて、さらなる小型軽量化が求められた。当然ながら、小型化すると車輪のサイズも小さくなり、走行性能が落ちて、傾斜や障害物を乗り越えられなくなる。着陸地点から動けないと話にならないので、小さくても月面を安定して走行できる機構を検討し始めた。
まずは、タカラトミーに協力してもらい、おもちゃ技術を使って変形・展開する機構を取り入れた。外郭の半球が左右に割れて、そのまま車輪になり、さらにメインボディの逆回転を抑えるスタビライザーが展開する(図1)。これによって走行の安定性を向上させることができた。ちなみに、搭載されているモータは2つのみで、これだけで変形・展開と前進・旋回の制御を行う。宇宙機の開発では、信頼性を上げるために部品点数を抑えることがあるが、おもちゃ開発でも子供たちに安心して遊んでもらうために同じことが求められる。簡易的な機構・構造を用いて部品点数や質量を抑えるという技術は、意外にも宇宙開発とおもちゃ開発に共通して求められるもので相性が良かった。
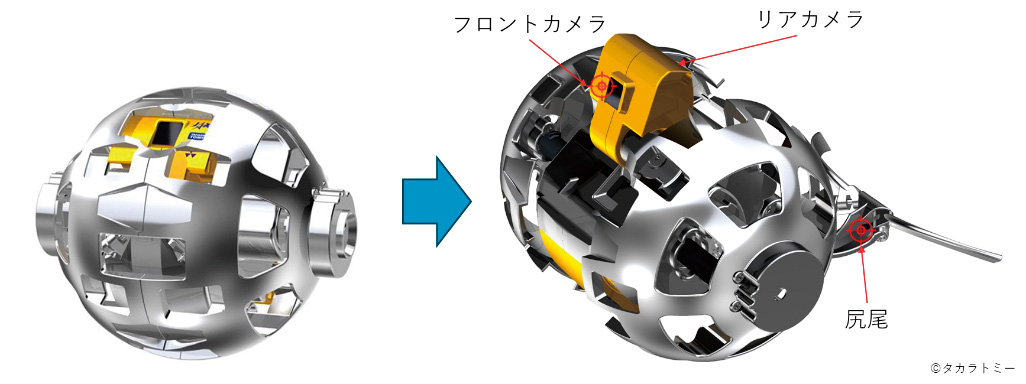
図1:おもちゃ技術を応用したロボットの展開。球形のコンパクトな状態でSLIMには収納されているが、月面到着後に内部のシャフトを回転させることでバネによって半球型の車輪が外側に伸展し、カメラを搭載した頭部や尻尾を展開する。形状を拡大することで走行性能を向上させている。©JAXA /タカラトミー/ソニーグループ㈱/同志社大学
しかし、レゴリスで覆われた柔らかい地面を走らせると、スリップして車輪が埋もれてしまう課題が残っていた。車輪のサイズを大きくすることはできず、開発者たちは頭を抱えていた。そこに、タカラトミーから車輪の回転軸をずらした偏心回転のアイディアが出てきた。これを試すと、車輪が掻くことができるリーチが長くなり、20度程度の傾斜であれば走行できるようになった。ウミガメの動きからインスパイアされた玩具メーカーらしいユニークな発想だった。
図2にこれまで試作した歴代のロボットを示す。開発中は、試作と試験を繰り返して形状や機構を何回も改良した。ロボットが超小型で作りやすいこともあるが、COTS品(入手しやすい市販品・既製品)を利用したことや、共同研究先のタカラトミーとソニーグループ(制御ボード・カメラ等の開発担当)のクイックな開発スピードに助けられ、試作・試験のサイクルを早くまわすことできた。結果として、課題の早期発見や迅速な改良に繋がり、この点でも異分野企業とのコラボレーションによる恩恵を受けていた。
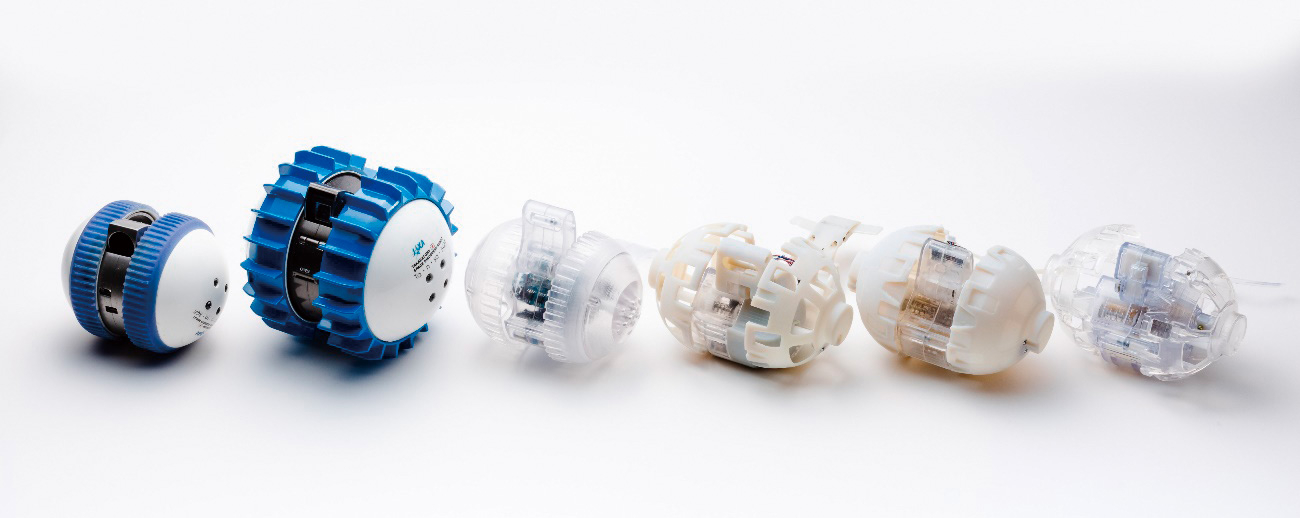
図2:過去の試作機。初期のモデルでは、内部の機器や配線に干渉が無いか目視で確認するため、ボディ部分に透明の樹脂を使っている。このあとに製作した環境試験モデルやフライト品には、宇宙環境に耐えられるようにアルミなどが用いられている。©JAXA /タカラトミー/ソニーグループ㈱/同志社大学
超小型ロボットの賢い知能
LEV-2は、もう1台の超小型月面探査ローバLEV-1と共にSLIMに搭載され、SLIMが月面に着陸する寸前に放出される(図3)。その後、月面を移動し、SLIMの着陸状況が分かる画像を撮影して地上に送信するのがLEV- 2のミッションだ。LEV- 2はSLIMと通信を行わず、取得したデータをLEV-1に無線送信し、LEV-1が直接地上に転送する。わざわざSLIMとは別の通信ラインを使うのは、万が一SLIMが着陸失敗などで通信不具合が発生した場合にデータを送信できなくなることを避けるためだ。しかし、LEV-1も超小型ロボットなので、消費電力や熱の制約で地上と通信できる時間やデータ量は限られている。LE V-1を経由してLEV-2を地上からコマンド操作するのは難しいため、LEV- 2は完全自律制御を採用した。つまり、人間のサポートは一切受けず、自力でSLIMを見つけて画像を撮って送らないといけない。さらに、データ量の制約から送信できるのは多くて2 ~ 3枚程度で、たくさん画像を撮ってもすべてのデータを地上に転送することはできない。そのため、SLIMの着陸状況や周辺環境が適切に写っている画像、いわゆる「見栄えの良い写真」を選定して送る必要があった。
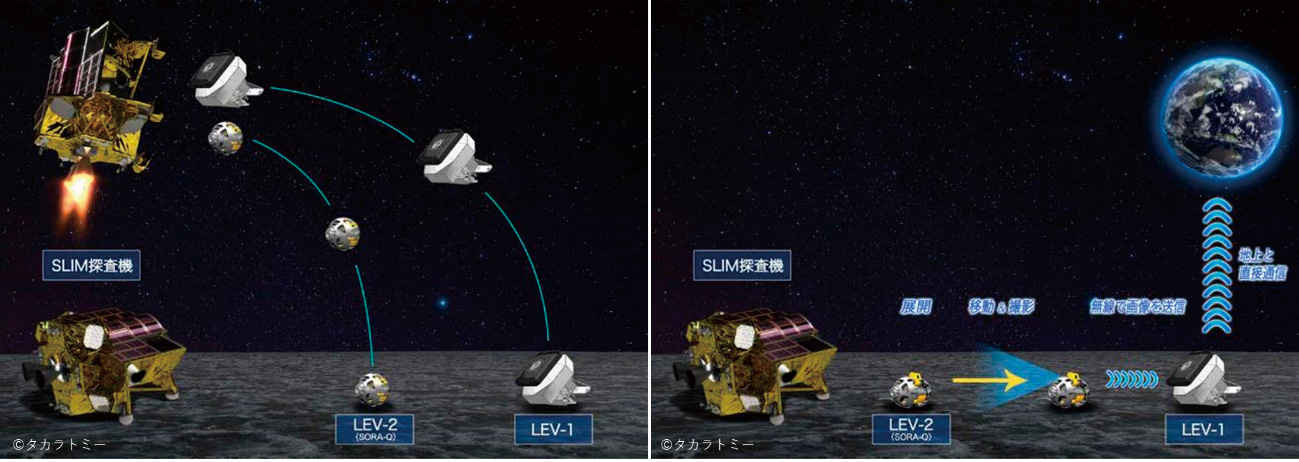
図3:LEV-2の動作シーケンス。LEV-2はもう一台のロボットLEV-1と共にSLIMから月面に放出される。その後、LEV-2は完全自律制御でSLIMの周辺を走行・撮影し、そのデータをLEV-1経由で地上に送信する。地上からの指示・コマンドは一切受けずに、ロボット自身がすべてを判断して自律的に動作する。©JAXA /タカラトミー/ソニーグループ㈱/同志社大学
そこで、ソニーグループに協力してもらいながら、カメラを使ってSLIMを発見できる「知能」をLEV- 2に取り入れた。宇宙機には、過酷な熱環境から機器を守るために、MLIと呼ばれる金色の断熱材シートが取り付けられている。このMLIの色相に着目し、撮った画像の中からSLIMの領域を検出する画像処理アルゴリズムを開発した。これによって、LEV- 2はSLIMとの位置関係を推定することができ、SLIMの周辺を走行したり、画像撮影時にSLIMの方を向いたりすることができる。さらに、SLIMが写った見栄えの良い写真だけを選んで送信することもできる。まさに一石二鳥の機能だ。しかし、画像処理は計算コストが高いため、小型・低消費電力のマイコンボードに実装するのは難しい。LEV-2は、ソニー製の小型カメラと処理能力が高い最先端の制御ボードSPRESENSETMを利用することで、オンボード画像処理を可能にした。地上とは光学環境がまったく異なる月面でも、正確にSLIMを検出したり、見栄え良く写真を撮ったりできるように、月面を模擬した探査フィールドにSLIMの模型を置いて何回も撮影試験を行い、画像処理アルゴリズムを改良して完成させた(図4)。

図4:(左・中央)探査フィールドでSLIMの模型を撮影した試験結果と(右)月面で撮影した写真。赤枠はSLIMの検出結果を示している。探査フィールドを使った地上試験では逆光の場合でもSLIMを検出できることを確認していた。右図は、ロボットが月面でも正しくSLIMを検出できていたことを示している。©JAXA /タカラトミー/ソニーグループ㈱/同志社大学
月面カメラマンの大活躍
LEV-1とLEV-2 は共にSLIMに搭載され、2023年9月7日にH-IIAロケット47号機で打ち上げられた。そして2024年1月20日に月面着陸直前に月面に放出された。前述のように、LEV-1の通信系はSLIMとは別系統のため、月着陸の当日、LEV-1とLEV-2の関係者はSLIMの運用が行われている相模原キャンパスではなく、内之浦や臼田の観測所でLEV-1の電波を受信・保存する業務を行っていた。SLIM着陸直後、LEV-1からの電波を受信できたことで、少なくともLEV-1が正常に分離されて動作していることは分かった。しかし、LEV-1から受信したデータを復元してその中身を確認しないと、月面でLEV-2が正常に動作したのかどうかは分からない。受信データの復元には数日の作業時間が必要だったため、LEV-2の結果を確認するまでもどかしい日々が続いた。その間に、SLIMの着陸状況が分かってきて、ノズルが天頂に向いた姿勢で着陸したらしいという情報が入ってきた。当初の想定とは異なる条件で着陸したので、LEV-2が無事にSLIMを見つけ出せたのか不安だけが強くなっていた。
ここで冒頭の話に戻る。LEV-2は私の不安をよそに、見事にSLIMを探し出して撮影し、その画像を我々に届けてくれていた。ようやくLEV-2が月面で正常に動作したことが分かり、開発メンバーと喜び合った。ロケットの打上げ振動に耐え、宇宙空間を何百万キロも飛んで、地球とは環境がまったく異なる月面に放り出されて、それでも自力で立ち上がってSLIMを探して、画像を撮って送信したと思うと、小さいのに本当に良く頑張ったなと思う。車輪の位相によっては、画像の中にLEV-2の車輪が写りこむことがあるのだが、ちゃっかり両方の車輪を入れてくるあたり、自己主張してて憎めないロボットだなと感じた。
自律制御でキー技術となった画像処理の結果を図4(右図)に示す。赤枠はLEV-2がオンボード処理で検出した結果を示しており、月面でも完璧にSLIMを検出できていた。さらに、詳細を解析した結果、事前に設定したプラン通りに、この画像はSLIMから約5m離れたところから撮影されていたことも分かった。月に降り立った小さなカメラマンは、こちらのリクエスト通り完璧に仕事をこなしてくれた。
LEV-2が月から伝えてくれたこと
LEV-2は、SLIMの着陸状況が分かる情報を取得するというミッションを見事に達成した。SLIMに搭載された航法カメラや分光カメラで撮影した月面の画像はあったが、SLIM自身を撮影した画像は他には存在せず、LEV-2の画像によってSLIMの着陸状況を鮮明に捉えることができた。この成果が出たのは、SLIMが無事に月面まで運んでくれたからで、さらにLEV-1が地上にデータを転送してくれたからであり、見事な連携プレーだった。
ちなみに、LEV-2が送信する画像は、データ量を抑えるためにグレースケールに変換する選択肢もあったが、「リアリティのあるデータを取りたい」という開発者たちの思いから、あえてカラー画像を送ることにしていた。結果として、無機質で色彩のない月面で金色に輝くSLIMを捉えたインパクトのある画像を取得できて、たくさんの人たちに月面着陸の現実感を伝えることができたと思う。LEV-2が月面で撮った画像を見て、SLIM関係者だけでなく、たくさんの人たちが喜んでくれたことはすごく嬉しかった。
一方で、開発者としては悔しいこともあり、画像の真ん中付近にデータの欠損部分が出てしまったことや、送信データ量を抑えるために画像をあえて低解像度・高圧縮にせざるを得なくなったところに悔いが残っていた。周りの人たちがすごく喜んでいたので、気にしないようにしていたが、ある日ソニーグループの開発者が「SLIM周辺の月面が白飛びしてしまった」と残念がっていた。月面で撮影できたことだけで十分すごいことなのに、さらに画像の美しさにもこだわっていて、「さすがカメラを開発しているソニーだ!」と感心させられた。また、それと同時に、自分と同じように悔しがっている人をチーム内で発見して、改めて素晴らしいパートナーに恵まれていたなと実感した。
LEV-2にはSORA-Qという愛称が付いている。そのフラグシップモデルがおもちゃとして市販されていることもあり、たくさんの子供たちに応援してもらった。みんなの応援が月まで届いて、SORA-Qも頑張ることができたと思う。ぜひ、子供たちには月を見上げてもらって「あそこにSLIMやSORA-Qが行ったんだ」と想像してみてほしい。そして、「SLIMはどうやって月まで行ったのだろう?」「SORA-Qはなんであんな形をしていて、どうやって月で動いていたんだろう?」と考えてみてほしい。その疑問の答えには、たくさんの科学技術が詰まっている。SORA-QのQには、Question(問い)やQuest(探求)の意味が込められている。このSORA-Qの挑戦が、たくさんの子供たちに届いて、宇宙への問いや探求心に繋がり、科学技術への興味を広げるきっかけになることを心から願っている。
【 ISASニュース 2024年7月号(No.520) 掲載】