
1億キロの彼方にある火星を走るローバーが撮った写真が、ものの数時間でみなさんのスマホに届く。
そんな信じられないことが当たり前の時代だから、宇宙はすぐ身近にあるような錯覚に囚われることがある。もちろん、事実は逆だ。人間が地球以外で歩いたことのある天体は月だけ。ロボット探査機すら、表面に着陸したことがあるのは月、火星、金星と、土星の衛星タイタン、そしていくつかの小惑星のみである。地球の「家庭内」である太陽系ですら、未踏の場所だらけだ。
月や火星の地下には洞窟のネットワークがある。木星以遠にはほとんどが氷でできた衛星がたくさんある。そしてそのいくつかは、分厚い氷の下に液体の水を湛える海を持っていることが知られている。そこに何かいるのか?何がいるのか?想像が尽きることはない。
どうすれば、そのような場所へ行くことができるのだろう。人が行けなくとも、せめてロボット探査機を送り込むことができるのだろう。
僕はNASAジェット推進研究所(JPL)で10年近くにわたり火星探査に携わってきた。そしてこう思う。より困難な場所を探査するには、パラダイムシフトが必要だ、と。
ロボット宇宙探査のパラダイムシフト
ロボット宇宙探査の歴史をざっくりとおさらいしよう。アポロ以前のロボット探査の殆どは月が目的地だった。これを「ロボット探査1.0」と呼ぼう。JPLは10年間に20機の探査機を月へ打ち上げ、12機が失敗した。失敗に挫けず挑戦は繰り返され、僅か1、2ヶ月の間隔での再挑戦もざらだった。「ロボット探査1.0」とは要するに、ハイペースの試行錯誤である。これは月探査技術を習得するのに賢明な方法だ。月は近い。たった3日で着く。そして毎月打上げチャンスがある。どんどんトライしてどんどん失敗し、そこから多くを学べる。現在、世界各国の民間企業が試行錯誤を繰り返しながら月着陸にしのぎを削っているが、同じ道を我々も通ったのである。だが「ロボット探査1.0」は火星には使えない。遠いからだ。片道で6〜8ヶ月かかり、打上げ機会も26ヶ月に1度しかない。毎月試行錯誤を繰り返すことはできない。
そこで新たなパラダイムが用いられた。「ロボット探査2.0」と呼ぼう。JPLはこの30年で14機の火星探査機を打ち上げ、11機が成功した。「ロボット探査2 . 0」は慎重な開発で一発成功を期す。そのためのもっとも重要なポイントは、簡単なミッションから複雑なミッションへ徐々にステップアップしていくことだ。
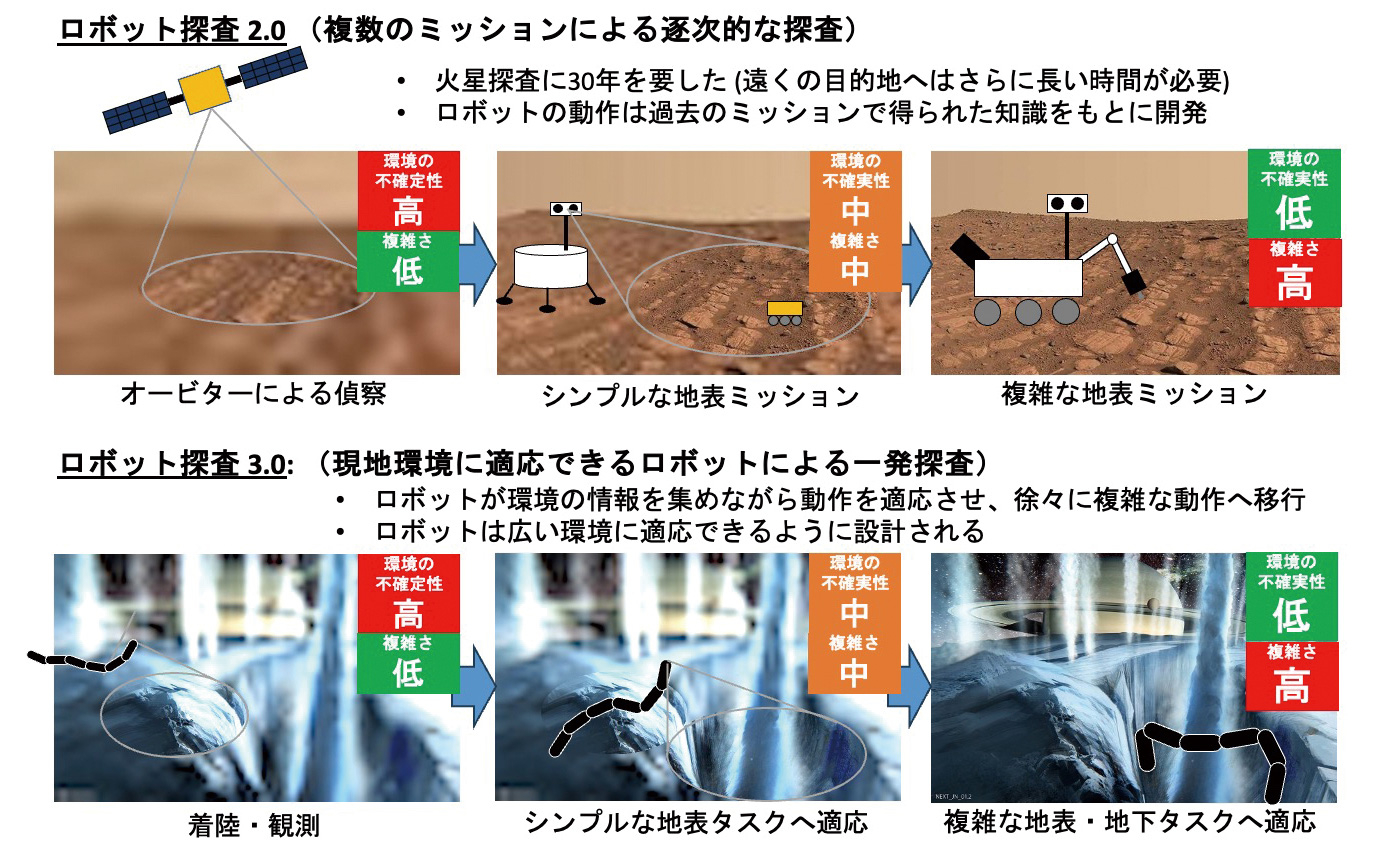
図1:(上)現行のパラダイムである「ロボット探査2.0」と、(下)提案する新しいパラダイム「ロボット探査3.0」 Credit:NASA/JPL-CalTech
図1の上を見てほしい。「ロボット探査2.0」の概念図だ。どの天体も最初は未知のことだらけで、不確定性は非常に高い。そこでまずオービターを送り込み軌道上から地表を観測する。それによって得られた地表環境の知識を活用してシンプルな着陸機を設計し送り込む。これにより地表環境についてさらに多くの見識が得られる。それを最大限活用することで、現在火星を走行しているキュリオシティやパーサヴィアランスのような高度に複雑なロボットを開発し、確実に一発成功を期すことができるのである。
だが、火星以遠をパーサヴィアランスのように高機能なロボットで探査しようとするなら、どうすればいいのだろうか?木星以遠へ行くには片道10年以上かかることもあるから、10の探査機を順次送り込むには100年かかる。洞窟探査するなら軌道上から写真を撮ることはできない。そもそも、火星ひとつに集中してきた過去30年とは異なり、未来のロボット探査の目的地は多数ある。要は、「ロボット探査2.0」は火星の地表よりも困難な場所を探査するのには適していないのである。
そこで僕は「ロボット探査3.0」という新しいパラダイムを提唱する。鍵となるのは、ロボットの適応性だ。図1の下を見てほしい。未知の環境に適応性の高いロボットを送り込む。環境についての理解が乏しいうちは動かずに周囲を観測するなどシンプルな動作を行い、情報収集を優先する。そしてどのような動作を行えば安全にその環境を探査できるか理解し、ロボットの動作を適応させる。最初は低速走行などシンプルな探査で環境についての理解を深めた上で、さらに動作を適応させていき、困難な地形の走行や地下の探査など複雑な探査を行う。このように、適応力の高いロボットを用いれば、一発の探査で未知の環境のロボット探査が可能になると僕は考える。
ヘビ型ロボットで挑むエンケラドスの氷の下の海
「ロボット探査3.0」の嚆矢(こうし)*2となるために僕たちが開発したのが、EELS(Exbiology Extant Life Surveyor : 地球外生物痕跡探査機)という蛇型ロボットだ。
その究極の目的は、土星の衛星エンケラドスの地底の海の探査である。この直径500 kmほどの小さな衛星は全体が氷で覆われ、その下には液体の水を湛える海がある。さらに南極付近には地底の海へつながる氷の割れ目があり、水蒸気が宇宙へ向けて噴出している。
僕たちのアイデアはこうだ。EELSは着陸後に氷の割れ目へ這い、適した穴の入り口を見つけ、中に入って降りていく。忍者が壁と壁の狭い隙間を、手足を突っ張って昇り降りする様子と似ている。そして海水をサンプルして、そこに何かいるのか、何がいるのかを調べるのである(図2)。

図2:EELSによるエンケラドス探査のコンセプト Credit:NASA/JPL-CalTech
EELSは極めて適応力が高い設計になっている。ボディーは複数のモジュールを連ねた構造で、各モジュールの脇には螺旋状の刃がついており、これを回転させることで前後左右に進むことができる。高い機械的自由度と、スマートなロボットの知能を組み合わせることで、EELSは環境に適応した多種多様な動作をすることができるのである。

図3:(左)火星ローバー・オポチュニティは砂地からの脱出に39火星日を要したが、(右)EELSは簡単に脱出できた。 Credit:NASA/JPL-CalTech
一例をあげよう。2005年、火星ローバー・オポチュニティは砂地に車輪を取られて抜け出せなくなり、脱出に39火星日を要した(図3左)。ローバーは車輪を回して前後に進むという一通りの動き方しかできない故、できることが非常に限られていた。EELSも砂地走行の実験をしている間、幾度となくめり込んで前進できなくなった。しかしEELSは横方向へうねるように進む「サイドワインディング」という動作に切り替え、難なく脱出することができた(図3右)。適応性の高さゆえ、予想外の事態にロバストに対処できたのである。
僕たちはEELSのプロトタイプを開発し、地球上の環境でテストを重ねた。最初のプロトタイプ、EELS 1.0は、長さ4m、重量80kgもの大きなロボットだ。
最初の試験はJPLから車で10分のパサデナの街中にあるスケートリンクで行われた。夜10時から朝5時までリンクを貸し切り、EELSが平らな氷の上を難なく走行できることを確認した。次に行ったのは雪山での試験だ。車で3時間ほどの場所にあるスキー場や、JPLが山の中に所有する天文台の敷地で雪上試験を行った。EELSは起伏の大きい地形を難なく走行し、傾斜35度の雪で覆われた斜面を登ることに成功した。
氷河での垂直降下実験
そして僕たちはプロジェクトの本丸、垂直方向の移動に挑んだ。そのために開発されたのがEELS 1.5という第二世代のプロトタイプだ。ボディの中央を省いて電子機器を乗せた箱を設置したので、ヘビというより二本脚のクモのような形になったが、基本的構造はEELSと同じである。
最終試験の地として選ばれたのは、カナダのジャスパー国立公園にあるアサバスカ氷河だった。ここには「ムーリン」と呼ばれる深さ10 〜30mにもなる縦穴がいくつも口を開けている。おそらく地球上でもっともエンケラドスに似た場所だろう。
氷上での試験は困難を極めた。寒さと強風が体力と判断力を奪う。ムーリンに滑落すれば命はないから安全に最新の注意を払う必要がある。実験室では10分でできることが氷上では1時間を要する。
試行錯誤の繰り返しだった。EELSをロープに吊り下げ、慎重にムーリンの中へ下ろし、電源を入れる。EELSは両腕を拡げ、忍者のように両側の氷壁に突っ張る。そして徐々にロープを緩める。これに成功すれば、ロボットは垂直の氷壁で自重を支えることができたということだ。そして側面の螺旋の刃を回転させ垂直方向へ動こうとすると・・・・
「ガシャン!!」
大きな音と共にEELSが滑り落ち、ロープに宙吊りになる。ため息とともに非常停止ボタンが押される。
時間はどんどん過ぎた。問題に対処するため、メンバーたちは手袋を外し、かじかむ手でキーボードを叩きプログラムを修正した。夜はホテルの部屋での突貫作業だった。
試験開始から15日目。氷上試験に残された時間はあと2日だ。この日も失敗を繰り返すうちに夕方になり、あと1回の実験を行う時間を残すのみとなった。
クレーンで慎重にEELSをムーリンに下ろす。ロボットが異世界の入り口へ入っていくような気がする。起動。自重支持に成功。「力覚フィードバック制御*3 オン、3、2、1...」とオペレーターがアナウンスする。ロボットは安定している。「垂直降下開始まで、3、2、1、...」チームに緊張が走る。EELSの螺旋の刃はメリメリと氷に食い込む音を立てながら力強く、回転を始めた。
10cm。20cm。ロボットは安定している。いいぞ!いいぞ!(図4)
50 cm。1m。ロボットの腕は起伏に見事に順応し、力強く降下を続けている。
1.4m。1.5m。ガシャン!!!大きな音を立て、EELSは滑落した。
結果は、約1.5mの完全自動降下。ロボットによるムーリンの垂直降下はおそらく史上初だと思う。チームは喜びに沸いた。大きな成果とともに僕たちとEELSはカリフォルニアへ戻った。

図4:アサバスカ氷河におけるEELSの垂直降下試験の様子 Credit:NASA/JPL-CalTech
一台のロボットにとっては小さな一歩だが・・・
もちろん、エンケラドスの地底の海はまだまだ遠い。技術的課題は山ほど残っている。だが、垂直の氷壁をロボットが降下することが可能であると実証するのに十分な成果が得られたと思う。一台のロボットにとっては小さな1. 5mだったが、人類にとっての大きな飛躍につながるかもしれないのだ。
僕たちはまた、冒頭に掲げた「ロボット探査3.0」の実現へ一定の筋道を付けたと思っている。火星の先へ進むにはパラダイムシフトが必要だ。EELSのような適応性に優れたロボットの技術が成熟し、「ロボット探査3.0」が実現した時、私たちは太陽系やその外に残る数々の未知の世界へとロボット探査機を送り込み、いくつもの謎を解き明かし、そしていずれは、「我々は宇宙にひとりぼっちなのか」という人類究極の問いへの答えも、見つけることができるだろう。
*1 © 2024 California Institute of Technology. Government sponsorship acknowledged.
*2 物事のはじまり。昔、中国で戦いを始めるとき敵陣に向かって、かぶら矢を射たところから開戦の合図に使われていた「鏑矢」から転じた言葉。
*3 物体と接触した際の引っ張られる、押されるなどの「力覚」情報を制御に用いること。
【 ISASニュース 2024年2月号(No.515) 掲載】