
はじめに
宇宙ロボットという言葉で何をイメージするでしょうか?フィクションに現れるロボットをイメージする人が多いのではないでしょうか?それらの多くは人間並みの巧みな動きができる上に、飛行したり変形したりと人間以上の能力を持つものばかりです。しかしながら、現在運用されているロボットをはじめとして、人間の巧みさの実現さえもまだハードルが高いものとなります。ましてや微小重力環境である軌道上での巧みな運動を実現するには、フィクションで描かれているような人間以上の能力が求められます。私たちはそのような将来の宇宙ロボット技術の礎となるトランスフォーマー宇宙機の研究開発を進めています。
宇宙ロボット
国際宇宙ステーション(ISS)を始めとする大型の宇宙構造物の軌道上組み立てや修理等の作業では、宇宙飛行士の安全確保や効率的な作業のためにもアームを備えた宇宙ロボットが利用されてきました。例えば、ISSに設置されたSSRMS(SpaceStation Remote Manipulator System)や、きぼうモジュールに設置されたJEMRMS(JEM Remote Manipulator System)は様々な用途で使われています。このような宇宙ロボットはISSなどの大きな構造物に設置されており作業空間は限定的なものです。一方、ロボット自身が自由に移動可能であれば作業空間に関する制約を緩和することが可能となり、ロボットの能力をさらに活用できるようになります。ERA( European RoboticArm)はISS上のベースポイントを掴みながら移動することで、より広範囲での作業を実現します。しかしながら、動作範囲はベースポイントの配置の制約を受けます。より複雑な構造物の建設や巧みなミッションを実現するためにも、ロボットにはより多くの自由度が求められます。その要求を実現する1つの解がフリーフライングロボットであり、その名の通り軌道上で自由に飛び回ることで、複数の作業対象や作業空間を移動しながら様々な作業(把持、移動、監視、検査など)を実現します。しかしながら、SSRMS、JEMRMS、ERAのようにロボット自身が大きな構造物に設置されていないことから、アームを動かすと、つまりはロボットの形状を変化させると、ロボット自身の姿勢が大きく変化するため、姿勢変化を考慮しながらアームを動かす必要があります。さらに、ロボットが実現できる運動はその形状や質量によって決定する慣性特性に依存するため、状況によっては実現できない運動が発生します。例えば図1に示すフリーフライングロボットにおいて、駆動関節1の動作のみで対象物を把持する簡単な作業を考えます。リンク1を動かすためにトルクを加えると、リンク1以外の構造(青線の部分)にも反トルクが加わります。Case AとBではリンク1以外の構造の形状が異なり、駆動関節1まわりの慣性モーメントはCase Aの方が大きい、つまりリンク1以外の構造に関してCase Aの方が動きにくい状況になっています。その結果としてロボット全体の姿勢変動は抑制され、Case Aの方が対象物を把持できることになります。一方、Case Bではリンク1以外の構造が折り畳まれているため狭い空間での作業が可能であるものの、リンク1以外の構造が大きく動いてしまうため、ロボット自身の姿勢変動が大きくなります。その結果として、リンク1が作業対象物に到達できない上に、ロボット自身が周囲と衝突する可能性があります。もちろん、他の駆動関節の動作によりこれらの問題を回避できる可能性はあるものの、その場合も姿勢と形状を同時に考慮する必要があります。このような性質ゆえに、フリーフライングロボットの実用的な運用のためにも形状(アームの動き)と姿勢の同時制御がとても重要な技術となります。
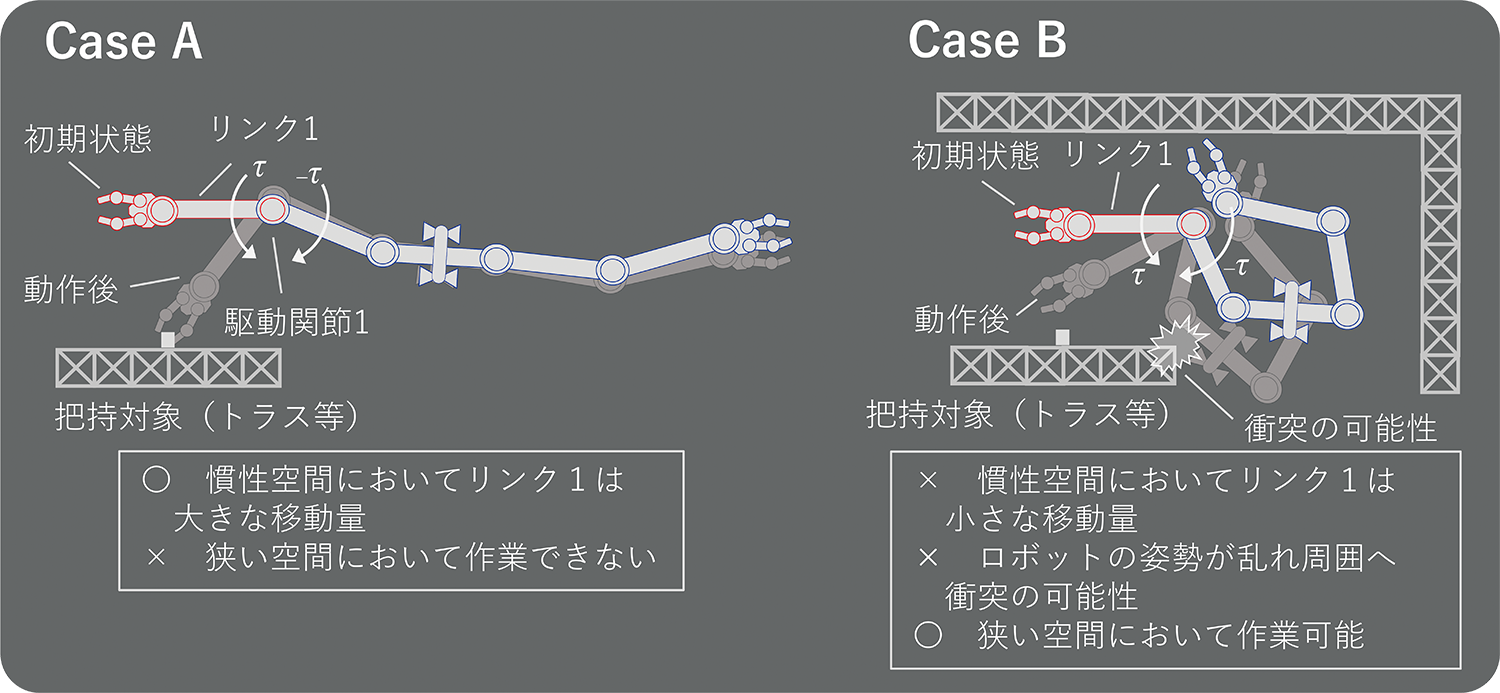
図1 フリーフライングロボットによる作業
トランスフォーマー宇宙機
本研究グループで実現を目指しているトランスフォーマー宇宙機とは、パネル構造やボックス構造などの複数の形態要素が互いに回転ジョイントなどの駆動関節によって接続された構造を持つ宇宙機です(図2)。まさにフリーフライングロボットです。駆動関節の動作により様々な形状に変形することが可能であり、異なる形状への変形によって複数の機能モードの実現が可能となります。このとき、複数の駆動関節を適切な順番で繰り返し動作させることで宇宙機が有する非ホロノミック性(後述)を利用した「形状と姿勢の同時制御」を行い、これまでにない宇宙機を実現することが可能となります。これは、将来のフリーフライングロボット技術への礎ともなります。
本宇宙機は技術実証衛星であり、前述のような「形状と姿勢の同時制御」の技術実証に加え、それに伴う関連技術(アストロダイナミクス、構造、熱、通信、パネル駆動など)の実証や、その特徴を有効に活用した理学観測ミッションの実現を目指しています。図2に示すように、27個のパネル構造とボックス構造から構成されており、全展開モードの状態で長手方向に約9.4m、その直交方向に約4.7m、質量は約280kgです。また、後述の小円halo軌道への軌道投入後は本宇宙機の技術実証に加え、観測モードの状態で理学観測ミッションとして搭載する干渉計とフーリエ分光計による天体観測を行います。
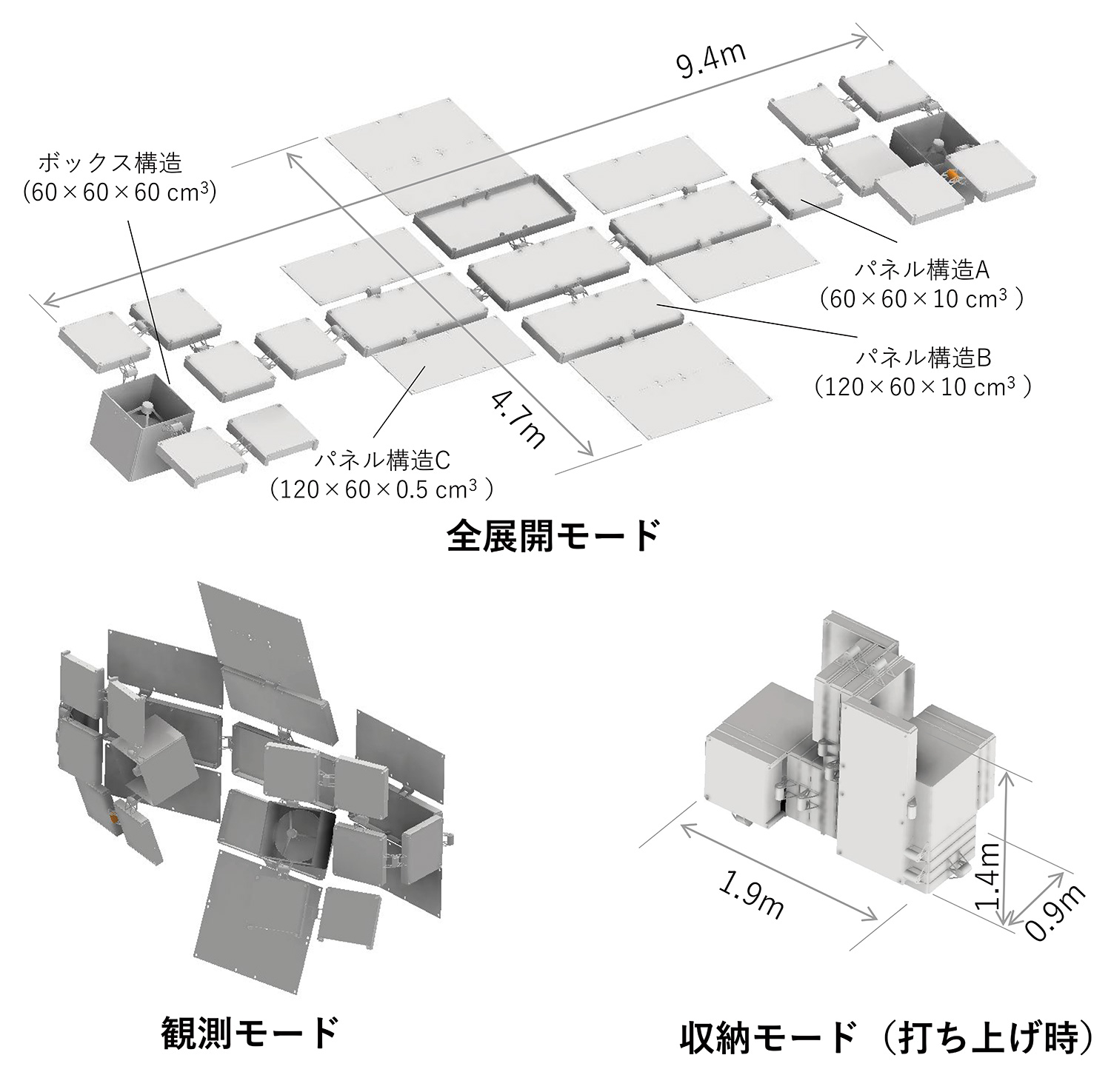
図2 トランスフォーマー宇宙機と各変形モード
非ホロノミック性を利用した形状と姿勢の同時制御
前述のようにトランスフォーマー宇宙機の最大の特徴は非ホロノミック性を利用した「形状と姿勢の同時制御」です。非ホロノミック性とは非ホロノミック拘束と呼ばれる運動に関する拘束条件に基づく性質です。一般に機械の運動が何らかの拘束を受けるとき、その自由度は少なくなります。一方、非ホロノミック拘束では自由度が減ることはなく、機械の動き方を組み合わせることで、様々な方向に動くことができます。このような非ホロノミック性を持つものは身の回りにも数多く存在します。例えば、猫は背中を下方に向けた静止状態から落下したとしても、身体をひねることで脚を地面に向け安全に着地することができます。これは「猫ひねり」としても知られている現象です。角運動量がゼロに保存され、内部にリアクションホイールやスラスタなどのトルクを発生する仕組みがないにも関わらず、猫は関節の動きを適切に組み合わせることで空中で姿勢を変化させることができます。さらに、着地時に足で地面を捉えるように体の形を整えており、姿勢と形状を同時に制御していると捉えることができます。
本宇宙機は複数の駆動関節を適切な順番で駆動させることで、形状を制御しつつ同時に希望の姿勢を実現することが可能です。図3に本宇宙機における非ホロノミック性を利用した形状と姿勢の同時制御のシミュレーション例を示します。この例では、図3上段の中央図および右図に示すように駆動関節AおよびBのみの駆動に限定したうえで、それらの運動の適切な組み合わせと繰り返しによって、図3下図のように初期姿勢から目標状態へ姿勢変更を達成しています。駆動関節AおよびBのみならず、他の駆動関節の運動も組み合わせることで、より効率的かつ高精度に希望の姿勢変更を行うこともできます。
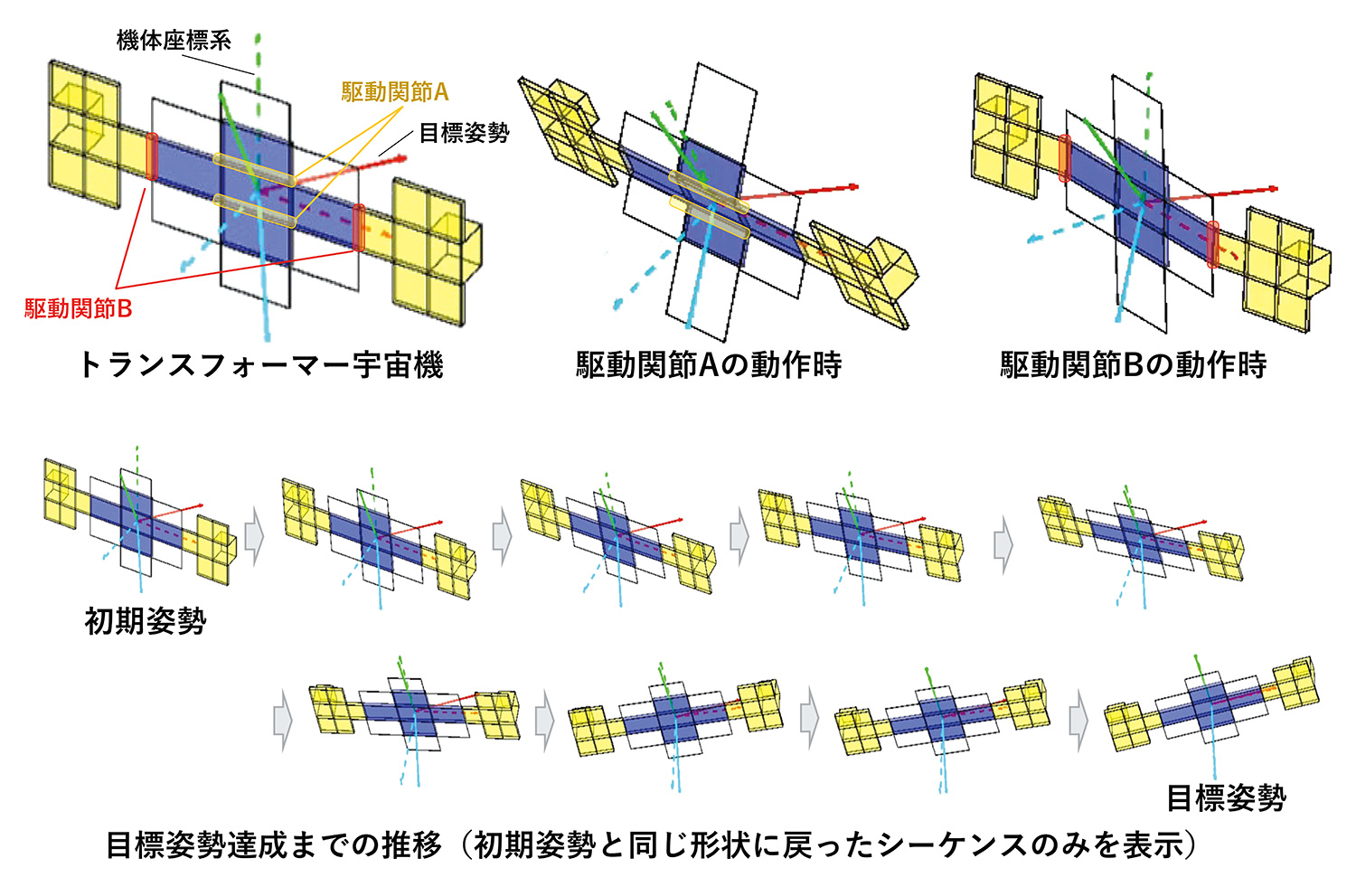
図3 トランスフォーマー宇宙機における姿勢と形状の同時制御の解析例
トランスフォーマー宇宙機の特徴的な技術と開発状況
以降では本宇宙機の実現にあたり特徴的な技術とその開発状況について抜粋して示します。
形状と姿勢の同時制御による太陽輻射圧を用いた軌道維持・制御:形状と姿勢の同時制御により、宇宙機が受ける太陽輻射圧を変化させることが可能となり、その輻射圧を外力として利用することで太陽-地球系のL2点における小円halo軌道上での軌道維持・制御を行います。小円halo軌道では外力が働かない場合には不安定ですが、このような形状、姿勢、軌道の統合的な制御を行うことで、安定な長期滞在が可能となります。
形状変形を活用した熱遮蔽による受動冷却:パネル構造を用いた太陽光の熱遮蔽により、振動などの擾乱発生源となる冷凍機を使用せずとも機器の冷却が可能(受動冷却)となります。そのため、本宇宙機は無擾乱かつ低温環境が要求される観測ミッションなどに適しております。観測機器を搭載したボックス構造の温度を−40 K程度まで受動冷却できる可能性を数値解析結果によって示しており(図4(a))、さらに受動冷却性能の検証のためにパネル構造および展開ヒンジから構成される基礎モデルに対し熱真空試験を進めています。
パネル構造・展開系:宇宙機に必要となる各機器はパネルやボックスの各構造に搭載されます。そのため、それらの構造に依存して機器サイズや機器配置が決まるため、従来の衛星とは大きく異なる設計方針となります。また、駆動関節を跨いで設置されるハーネスの剛性が形状変形動作に影響を及ぼすため、ハーネスの検討においても従来の宇宙機とは大きく異なる設計が求められます。そのようなトランスフォーマー宇宙機に固有の課題を解決すべく、図4(b)のようなパネル構造および駆動ヒンジを開発し、展開試験や振動試験等を進めています。
理学観測ミッション:本宇宙機は干渉計とフーリエ分光計の2種類の観測装置を搭載します(図4(c))。いわば観測器を操るフリーフライングロボットです。干渉計では複数の望遠鏡をそれらの距離を変えつつ様々な方向に向ける必要があり、形状と姿勢の同時制御が可能な本宇宙機の特徴を十分に活用できます。口径が10 cmの望遠鏡2つを2つのボックス構造のそれぞれに搭載し、3m級の大口径の望遠鏡と同程度の分解能で天体観測を行います。これが実現できれば世界初の可視光領域による軌道上干渉計観測となります。また、ボックス構造の一方にはフーリエ分光計を搭載し、高スペクトル分解能の観測により黄道光のフラウンホーファー線を検出する新たな観測手法の開拓を目指しています。本宇宙機に搭載するフーリエ分光計では振動のない静かな環境と低温環境が必要であり、これも本宇宙機における無擾乱で冷却が可能という特徴を十分に活用した観測ミッションになります。

図4 トランスフォーマー宇宙機における技術と開発状況の抜粋
終わりに
本研究グループはJAXAや大学などの様々な研究機関で構成され、宇宙工学委員会ワーキンググループ「トランスフォーマー宇宙機の実現とその応用に関する研究」として2020年代後半の打ち上げを目指して活動をしています。コロナ禍における活動の制約が発生したにもかかわらず、オンラインツールの発達によって遠方にいるメンバー間での速やかなやり取りが可能となり、研究開発をむしろ加速しています。引き続き応援頂けたら幸いです。
【 ISASニュース 2022年1月号(No.490) 掲載】