
現在、我が国が目指しているBig Three月面科学では、ロボット技術を有効活用することこそ重要であると考えています。それでは、どのようなロボット技術が必要なのでしょう?
その場分析とサンプルリターンのための探査ローバ
月面から科学的意義の高いサンプルを効率よく持ち帰るためには、地質学者がフィールド調査をするように動き回り、現場で分析をして、良いと判断したサンプルのみを採取する必要があります。このため、無人で移動しサンプルの発見、分析、採取を地球からの支援なく実行する自律探査ローバの研究・開発をする必要があります。
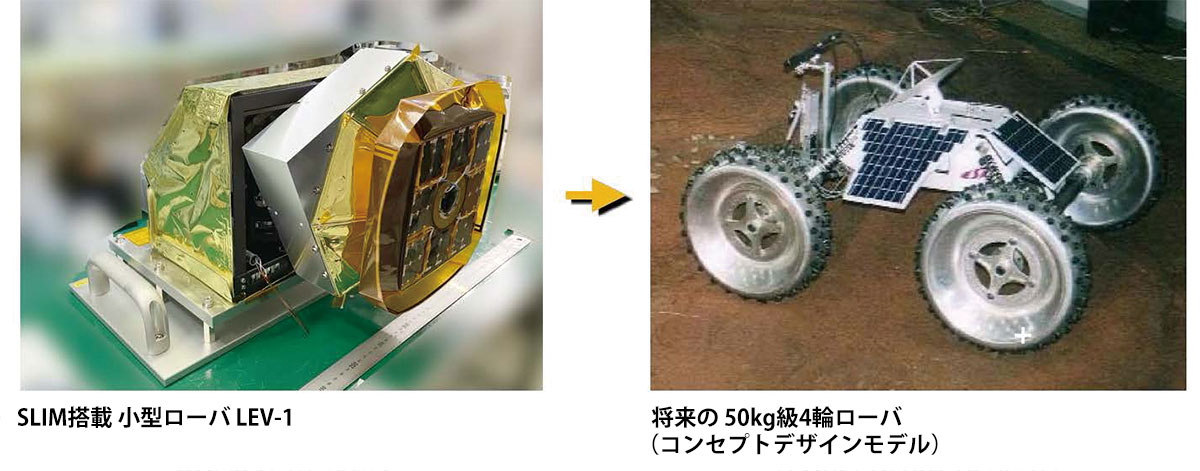
我が国初の月面探査ローバは2023年に打ち上げられたSLIM着陸機に搭載されました。しかし、質量2.1kgと非常に小型・軽量で、その表面探査能力は十分ではありませんでした。今後は、十分な観測能力と移動能力を有し、将来的には火星探査にも使えるような探査ローバを作り上げ、持続的に重力天体の探査を行いたいと考えています。
その場探査の最初のステップは高い自律性を有する50kg級のローバを月の南極で実証することです。その後、ローバの質量を200kgまで増加し、より難易度の高い地形の走破や大きな岩塊からのサンプルの抽出が可能で、昼夜で温度が大きく変化する月面低緯度での長期サバイバル能力の実現を目指します。
月面は周回衛星からのリモートセンシング観測が行われており、解像度約50cmの画像を得ることができます。これら画像を用いて科学的意義の高いサンプルが存在する地域もあらかじめ特定されています。しかし、良いサンプルが存在する地域は、地形に凹凸があったり、岩などの障害物が多かったりして、着陸機が降りるには危険です。このため、着陸機は少し離れた安全な場所に着陸し、探査ローバがサンプルの存在する難易度の高い地域を走行して現場に到着する必要があります。
これまでに海外の宇宙機関が月や火星に送った探査ローバは不整地走行能力を向上させるため、車輪の数を最低でも6個持たせ、車輪間のリンク機構をハードウェアとして工夫していました。
しかし、200kgまでの探査ローバでは機構を簡素化して軽量化するため4輪で十分と考えています。ただし、スタックを防止するため、車輪の走行状態の推定と制御、画像を用いた地形判断に基づく走行経路計画などのソフトウェア面でのロボット技術が必要となります。
月震計や月面天文台を設置するロボット
月震計や月面天文台は移動させる要求こそありませんが、複数台を月面で同時に稼働させ、その設置場所はお互いに距離をとる必要があります。
このような設置作業を月面着陸後に実施するためには、長距離移動可能な運搬ロボットに月震計や月面天文台ユニットを複数台載せ、各地に設置して回る必要があります。
大型の運搬ロボットとしては、現在、開発が進められている有人与圧ローバが候補になります。与圧ローバを利用する場合も、宇宙飛行士が船外に出て設置するのではなく、宇宙飛行士は内部にとどまり、ロボットアームを用いて作業する方が安全上適しています。
さらに、各地への移動や設置作業も自動化・ロボット化すれば、宇宙飛行士が休んでいる間や宇宙飛行士が乗っていない間も着々と作業が進みます。
観測装置のロボット化
アルテミス計画では人を月面に送り込むことを1つの目標としており、宇宙飛行士によって科学を進めることも重要です。
しかし、宇宙飛行士の限られた滞在期間中に、月面でのフィールド調査を十分に実施することは困難です。
そこで、宇宙船によって月面まで運搬し、宇宙飛行士が船外に置いて、スイッチをオンした後はすべて自動的に動作する観測装置を作ることを考えています。
この観測装置には移動能力があり、勝手に移動してあちこちでその場観測を実施します。また、地球と直接通信する能力もあり、宇宙船が去った後も観測を続け、得られたデータを地球に送信します。
このような移動機能のついた観測装置はもはや探査ローバです。50kg級ローバはこのように無人ミッションでも有人ミッションでも使えるような道具として考えています。
【 ISASニュース 2025年3月号(No.528) 掲載】