
はじめに
これまで20年以上の間切れ目なく衛星プロジェクトで忙しくしていたせいもあり、ISASニュースでは「ひさき」、「あらせ」、そして最近のSLIMについて関連の記事を担当しましたが、「宇宙科学最前線」に執筆させて頂くのはかなり久しぶりです。そこで今回は、この貴重な機会に、目前のプロジェクトからは少し離れて、将来に向けた技術研究のご紹介をしようと考えました。「ニューロモーフィック(神経模倣)」という、宇宙業界ではまだあまり馴染みのない分野の話題になりますが、どうぞお付き合いください。
プロジェクトからは少し離れてと言いながら、SLIM の話から始めてしまいます。SLIMのピンポイント着陸を実現するためには、光学カメラで撮像した月面画像を頼りに、探査機の位置を自律的に推定する技術が必要でした(ISASニュース2024年7月号連載など参照)。このいわゆる画像航法技術の研究開発の過程では、探査機上の計算機の能力が常に悩みの種でした。宇宙機で使用できる電子部品は、放射線への耐性の確保や高い信頼性の要求から概して性能が低く、SLIMの開発当時で、地上用の部品に比べて1桁~ 2 桁ほど処理能力が劣っていました。大学と協働で開発を進めたクレータを使用する画像航法アルゴリズムが、研究室のパソコンで1秒で動作するとしても、SLIM の搭載計算機では10秒かそれ以上かかってしまい、高精度着陸のために誘導制御系が必要とする時間要求に間に合わないのです。これに対し、SLIMでは処理精度を保ちつつ、アルゴリズムのぜい肉をそぎ落とした上で宇宙用のFPGAに実装して、画像航法技術を完成させました。
今後当面のプロジェクトでも、低リソースな演算環境に対しては、基本的にはアルゴリズムのシェイプアップで何とかしのぐという、SLIMと同様の作戦で対応することになると思います。これについてはもちろん、宇宙用部品の高性能化を目指したいところですが、演算チップの高周波動作は消費電力(と発熱)も課題になります。一方で、宇宙工学コミュニティの目標は「より遠くへ、より自在に」です。現状の我が国の探査機の電力は、太陽光発電をベースとしており、遠方探査では電力リソースが厳しくなります。一方で、通信遅延を考えると、自律性(及び必要な演算の高機能化)への要求は高くなります。この「逆センス」の関係の中で自在なミッションを実現するには、通常の技術の延長ではないパラダイムシフトやブレイクスルーが必須であると感じ、「そういえば人間や生物はそれほどエネルギーを使わずに、どうやって演算しているんだっけ?」という雑談を研究室内で始めました。雑談はほどなく研究につながり、手始めに当時大学院生だった狩谷 和季さん(現JAXA)が、後述するスパイキングニューラルネットワークやイベントベースカメラをクレータ抽出処理に適用した結果を学会で発表したところ、専門のコミュニティ(日本神経回路学会)から評価して頂き、優秀研究賞を受賞しました。以来、継続して、研究室の学生や将来技術に興味を持ってくださる民間企業の方と、関連の研究や議論を行っています。
ニューロモーフィック技術とは?
ニューロモーフィック技術とは、生物の神経機能を再現あるいは模倣したコンピューティングやセンシングを指します。生体のふるまいを正しく再現することを目指す生物学的な目的と、計算や計測の効率性の活用をモチベーションとするエンジニアリング的な関心(我々はこちら)が融合し、近年研究が盛んになっています。
ニューロモーフィックコンピューティングを概説するには、聞きかじりの知識で恐縮ですが、生体の神経細胞(ニューロン)のモデルが必要そうです。図1(a)のように、ニューロン間の信号伝達は、シナプスと呼ばれる接合部で行われます。ニューロン間で伝搬する信号は、短い電気パルス(スパイク)です。スパイク列の頻度やタイミングによって、情報が表現されています。スパイクがニューロンに到達すると、細胞体の膜電位が変化します。膜電位が特定のしきい値を超えると、新たなスパイクが発生(発火)して後段のニューロンに伝搬し、膜電位はリセットされます。また、膜電位は時間とともに低下します。このようなニューロンの動作は電気回路でうまく表現でき、電気系をバックグラウンドとする私には取っつきやすいです。膜電位を入力電流の積分(充電)と抵抗を介した電荷の漏れ(放電)で表現すると、図1(b)のようなRC並列回路が等価回路となります。
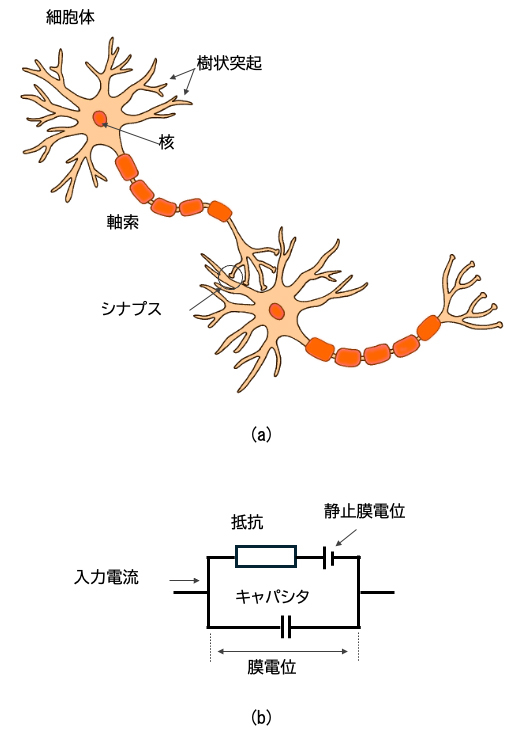
図1:(a)ニューロンの模式図と(b)等価回路。入力電流によりキャパシタが充電され、膜電位が上昇する。またキャパシタの容量と抵抗値で決まる時定数で、膜電位は低下する。
このようにニューロンとその結合をモデル化したスパイキングニューラルネットワーク(Spiking Neural Network: SNN)は、ニューロモーフィックコンピューティングの代表例です。これに対し、最近大流行している生成AIの基盤である深層学習などでもニューラルネットワークが使用されていますが、そこではニューロンの入出力はスパイクでなく数値情報です。すなわち、スパイクの代わりに発火率という時間情報を無くした数値を用いることで、クロック周期ごとに同期処理を行う通常のコンピュータで動作させやすくしています。一方、SNNはスパイクのタイミングをトリガとした非同期処理が特徴です。
また、昨今、イベントベースカメラ(イベントカメラ)と呼ばれる、各画素の瞬時瞬時の輝度変化の有無をタイムタグ付きで出力するセンサが注目されています。画像処理的に前後の画像を差分処理するのではなく、デバイスレベルでマイクロ秒オーダでの出力を実現しています。各画素内のアナログ回路で対数輝度の変化量を検出しているため、通常の光学カメラよりもダイナミックレンジが広く、地上用途では明暗の同時計測が必要な自動運転の分野などへの適用が検討されています。イベントカメラは生物の視神経の模倣ととらえることもでき、SNNに非同期パルスを入力するセンサとしても親和性が抜群です。我々の研究室でも、イベントカメラとSNNを使って、天体への着陸直前に障害物(ボルダー)を検知する研究などを行っています(図2)。
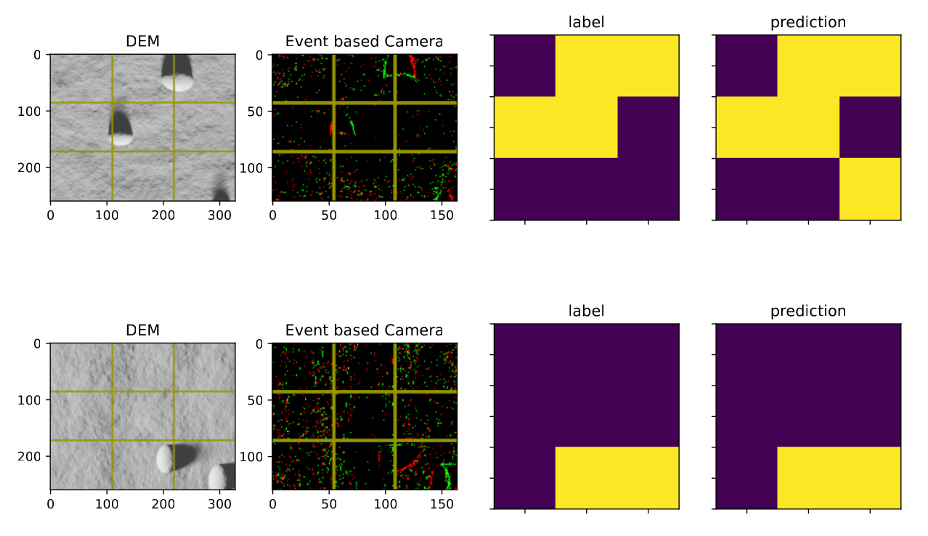
図2:スパイキングニューラルネットワークとイベントベースカメラによる障害物(ボルダー)検出のシミュレーション結果の例。着陸直前にボルダーの存在する方向を低レイテンシで検知し、回避行動に繋げられるかどうかを観点とした研究例。
1列目: ボルダーを配置した地形情報
2 列目: イベントカメラの出力
3列目: ボルダー存在領域の教師データ
4列目: SNNによる検知結果
ニューロモーフィック技術が宇宙機にもたらすメリット
SNNやイベントカメラを採用する利点は様々な観点がありますが、およそ以下のように整理できます。いずれも、宇宙機への設計要求でよく挙げられる項目ばかりです。
【1】 低消費電力
【2】 高速応答性
【3】 高ダイナミックレンジ
【4】 ロバスト性
【1】の低消費電力は、SNNの非同期処理やスパイクのスパース性がもたらす特長です。通常の計算機が周期的なクロックごとに一斉に回路を駆動するのに対し、SNN はスパイクのタイミングにだけ処理が行われるため、非常に少ない電力での動作を実現できます。実際、図2のボルダー検知の処理は、研究室にある民生ニューロモーフィックチップの実機環境で、およそ3 ミリワットで動作しました。こういった低消費電力性は、電力リソースの厳しい遠方探査や、大きな太陽電池やバッテリを搭載できない天体探査ロボットなどで、とても有用と考えられます。
【2】の高速応答性(低レイテンシ)は、SNNやイベントカメラのイベント駆動型アーキテクチャがもたらすメリットで、瞬時に何かを検知し、対応するアクションのための信号を出力するような用途に適しています。この議論を研究室で行うと、必ず出てくるアイデアは「じゃんけん絶対勝つマシン」ですが、宇宙用途でもスペースデブリ関連や電波識別などのアプリケーションに適用する検討が行われています。
【3】の高ダイナミックレンジは、主にイベントカメラが有する特徴です。宇宙機で光学画像を航法などに使用する場合に、太陽の位置や方向に関わらず、様々な日照環境で安定的な性能を発揮することは重要ですが、この観点でイベントカメラの宇宙応用は非常に魅力的です。また、イベントカメラの高ダイナミックレンジと高速応答性は、観測用途での使用も検討されており、実際にイベントカメラが国際宇宙ステーションに搭載され、雷やスプライト発光の検出実験が行われた例があります。
【4】のロバスト性については、今後の研究テーマがたくさんあります。例えばSNN のようなニューロモーフィックなコンピューティングは、現在宇宙機で使われている計算機と比較して、放射線に対する耐性が本質的に強いのか弱いのかという問いに対しては、まだ答えが出ていません。SNNの実装方法(アナログ/デジタル/両方を混成したハイブリッド)にも大きく依存しますが、スパイクという疎な情報を多数のニューロンでネットワーク的に処理するSNNのアーキテクチャは、放射線による局所的で一過性の障害には耐性が高い可能性があります。また、SNNの学習時に放射線障害を想定した工夫を施すことで、推論時のロバスト性を向上させるような萌芽的な検討も研究室で始めているところです。
おわりに
本記事を通して、ニューロモーフィック技術が宇宙機設計に本質的に相性が良さそう、という印象を持って頂けたかと思います。今後、宇宙機への適用を考えるにあたっては、従来技術との適切な役割分担を模索するアプローチや、システムの考え方自体を大きく変えてしまうアプローチの両方があり得そうです。例えば、前者については、深宇宙探査機のクルージングフェーズで、メインの計算機を待機状態にして、システムの消費電力を節約しているような場合に、SNNで最低限の異常検知系をごくわずかな電力リソースで動作させておく、というような使い方がイメージできます。後者については、もっと大胆に、探査ロボットを低消費電力化するために、ロボットが実施するタスクに関わる全演算をエンドツーエンドでSNN化してしまうのはありでしょうか。この場合、SNNが必ずしも得意でない演算も担うことになりますので、場合によっては性能面ではやや劣化するかもしれませんが、そこは多数のロボットを群的に協調させて、システムとしての性能を確保する方向性もよいでしょう(図3)。複数ロボットを開発することは大変ですが、SNNが放射線に対してロバストであるなら、宇宙用の特別な仕立てを考えなくてよくなり、開発の敷居はぐっと下がるかもしれません。
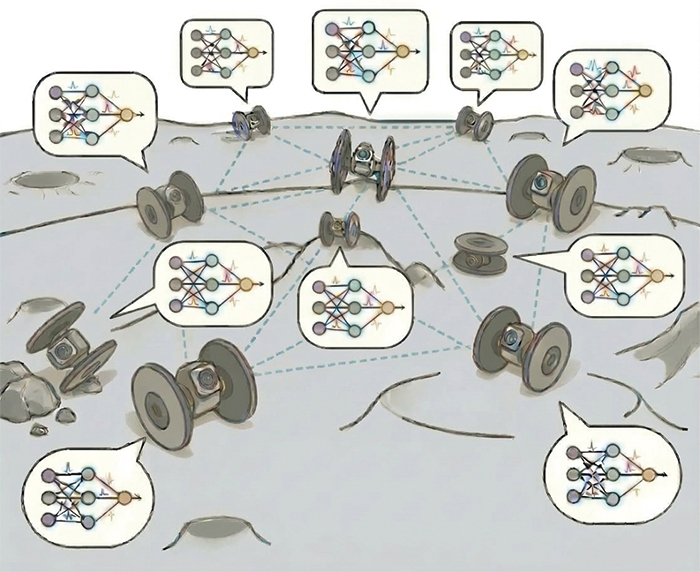
図3:ニューロモーフィックチップのみを搭載した複数ロボットが、群的に探査タスクを実行するイメージ図。
このように目いっぱい夢は広がりますが、まだ宇宙分野でニューロモーフィック技術を導入する機運が急速に高まっているという状況ではありません。一方で、アメリカでは3Uサイズのキューブサットによる民生のニューロモーフィックプロセッサの軌道上実験が行われたとか、欧州ではニューロモーフィックプロセッサを組み込んだSoC(System on Chip)の開発が進行中であるとか、海外でも着々と研究開発が進んでいます。我々も将来の科学衛星や探査機への適用を目指して、技術コミュニティを拡充しつつ、腕を磨いておきたいところです。もし本稿でニューロモーフィック技術に興味を持たれた場合には、ぜひお気軽にお声がけください。
【 ISASニュース 2026年5月号(No.542) 掲載】