
〜 月面跳躍ローバLEV1のDNAが向かう未来 〜
はじめに
子供の頃、親に付き合って流星や月食などの天体現象を見上げ、宇宙に惹かれた。Star TrekなどのSFで描かれる人類が宇宙で生活する世界に憧れ、ロケット、宇宙船、ロボットといった宇宙時代を支える電気・機械技術に興味を持ち、月面基地やスペースコロニーでの生活を夢見た。様々な縁で宇宙科学研究所と共に研究する機会を得て、気づけば30年近くが経つ。だが夢見た未来が遠い現実を感じてきた。もちろん工学的に未熟な部分、そして日本では月や深宇宙に行く理由がほぼ科学的探究でしか見出せない現実もあった。もちろん宇宙科学のための研究開発も十分に筆者の興味を満たしてきた。一方で近年、状況は大きく動いている。宇宙、ロボット、AI分野の発展と応用の勢い、それら技術融合の相性、技術要素の大衆化、それらの展開には目を見張るものがある。一過性であっても過去と明らかに異なる様相を呈する。また我が国でも科学以外の理由を見出す流れもアルテミス計画など国際的動きに押され変化してきた。さらにSLIMやLEVなどの成果も積み上がり、宇宙戦略基金など宇宙技術の大型予算も整備され、筆者がPM(Project Manager)を務める内閣府ムーンショット型研究開発事業(MS)でも2つのプロジェクトが月を目指す。まさに宇宙時代の幕開けに立ち会える情勢が揃いつつある。そこで本稿では、MSにおける我々のプロジェクトに関し紹介したい。
月面を目指しての25年とその先へ
2024年1月20日深夜、筆者は月面着陸機SLIMに搭載した小型ローバLEV1の運用画面を開発チームの一人として見つめていた。LEV1は無事、日本初の月面探査ローバとなり、世界初の月面跳躍移動、地球直接通信などを実証し今後に繋がる成果を得た(図1①②)。だが月面への道のりは長かった。2007年にSELENE(「かぐや」)による月周回観測が成功し、着陸の機運が高まるが、続く着陸計画SELENE-B(2000 〜2004年検討)は採択されず、その後も検討は続けたが約25年間実現されなかった。SELENE-BはSELENEから分離された実験計画で、小型ローバ搭載が議論されていた。米国がローバSojournerによる火星探査を計画(1997年に成功)したことを受け、我々は小型月ローバを研究し、その成果を基にSELENE-Bローバ(図1③)を検討した(その姿は近年の極域ローバ達に先行する)。しかし通常サイズのローバを研究しつつも、ミッション実現には技術以外の壁が感じられ、議論は徐々に小型機に移った。そして宇宙研 吉光 徹雄先生と移動する車中、着陸地点から500m程離れた直径50 mの縦孔に落ちるロボットを議論し、それがLEV1の原型となった。「はやぶさ」搭載MINERVAより始まる小型機の系譜は、最初は微小重力下での摩擦不足のため、続くLEV1では移動能力低下を補う手段として跳躍を採用し、理由は異なるが脈々と繋がっている。またかつては探査機余剰重量が唯一の機会ゆえの小型機だったが、それが前向なものに代わった個人的な契機は、JAXA/JST探査イノベーションハブ(RFP 3)に採択された図1④に示す次世代未踏峰探査方式の提案であった。多数の小型機を群行動させ点から面探査への転換、数を活かし高リスク環境への対応などで、その後のRFP 4、そして現MS検討課題へと繋がり、宇宙研と縁が深いプロジェクトになる。
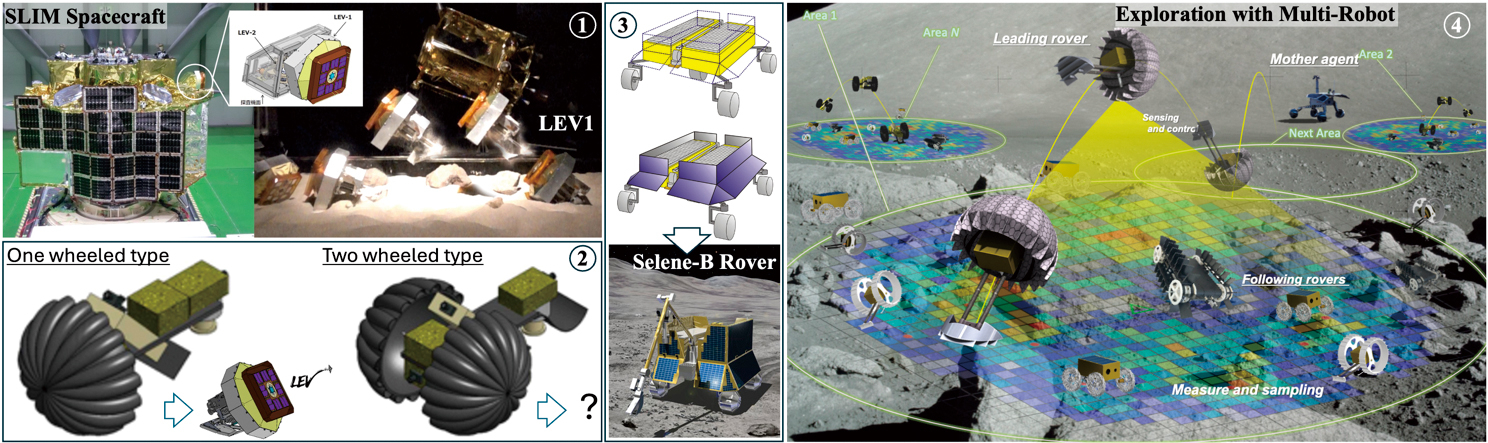
図1:日本初の月面探査の実現を目指した25年〜その先へ
ムーンショット型研究開発事業で開く宇宙時代
ムーンショット型研究開発事業は、10の目標(分野)で構成される。我々が所属する目標3は、AIとロボット、その融合領域を課題とし、現在8人のPMが各プロジェクトを遂行中である。その内2つが"人間が活動できない難環境"として宇宙、特に月を対象とし、2050年の未来都市構築に向けた研究開発を進める(図2①②)。我々は特に、土壌に守られ、より安全かつ安定な環境とされる溶岩チューブ(洞窟)内部を居住対象地とする。溶岩チューブは溶岩流の跡にできる横型洞窟で、月面上に多数ある穴(縦孔)の一部は天井部が崩落した穴とされるが実際は未確認となる。宇宙研でも長く科学ミッション検討がある対象だが、MSは工学利用を主とした別検討になる。MSでは、まず図2③の様に縦孔に侵入、横穴の存在を確認、続いて探査を経て居住環境調査、適地選定、資材輸送、建築と進み前哨基地を確保(図2④)、最終的に一般の人々が居住する月未来都市(図2②)の構築を目指す。しかし横穴は月周回軌道上より観測不能で、地球上と異なる物理環境、溶岩成分(水分の有無など)などで内部状態予測が困難な未踏未知難環境となり、ロボットには高リスク過ぎる環境となる。ゆえに従来手法でのアプローチは不可能なため、中央大、宇宙研を含む国内7機関が一丸となり各種研究開発を進める(海外1機関が応用検討)。
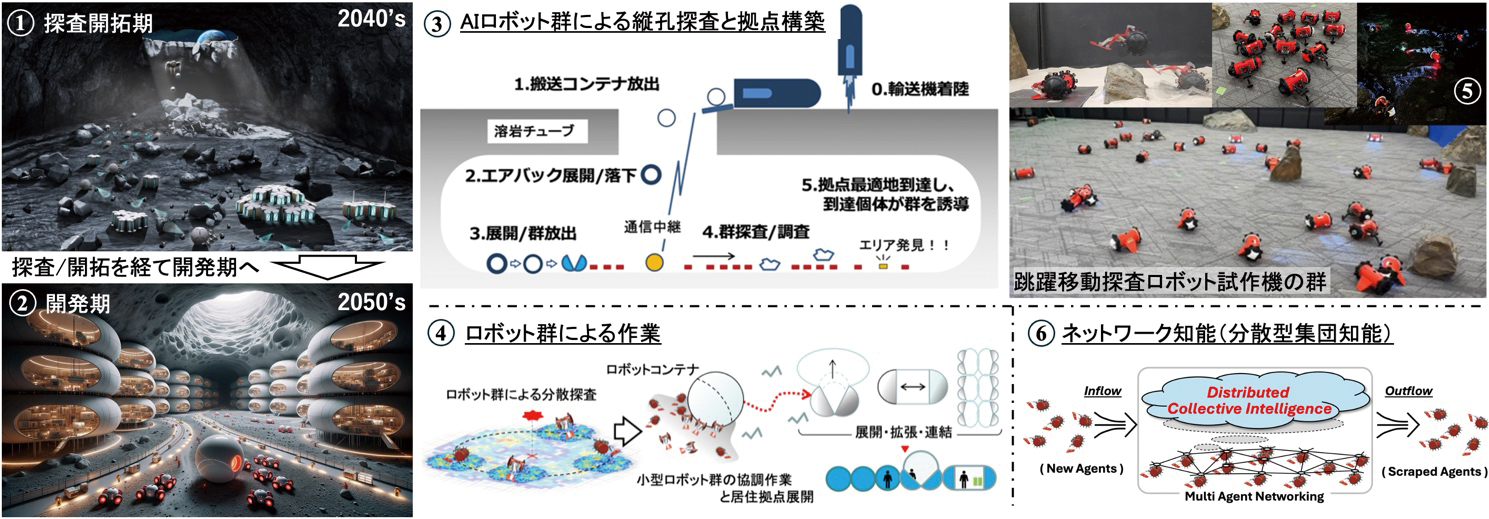
図2: 2050年の月面未来都市実現に向けたAIロボット群の研究開発と未踏峰探査技術
AIロボット群による溶岩チューブの探査・開拓
従来、ほぼ唯一の機体で探査達成を目指すゆえ、設計・運用の際、転倒、衝突、機体損失などの様々な危険要素を排除するリスク管理のため、高性能な計測と処理を行う機器が必要であった。さらに少ない打上げ機会で多様な成果を期待するため観測機器が増加し重量増と大型化そしてコストが上昇、当然、機体数が制限され、結果、リスク回避圧力が上昇という悪循環にある。しかし超難環境を狙うには、この点での発想の転換、すなわちリスクとの対峙法を根本的に変える必要がある。そこで、あえて機能抑制しても小型軽量化し機体数を確保し数でリスクを分散・抑制(図3)、運用数および編成の自由度の向上、そして余剰重量・容積の利用による打上げ機会確保を狙った。問題は力学的制約、機器・機能の削減による性能低下など負の側面である。大型機に比べ機能・性能では不利となるが、機数確保を優先し、主に以下3つの回復策をとった。
1. 群行動と分散共有型集合知能の実現
機体の物理性能、計測性能、処理能力を補うため、群知能と連携する分散共有型集合知能(ネットワーク知能:N知能)を個体間ネットワーク上に構築する。図3①の様に群知能では確率的動作による群生成を採用し可能な限り制御に必要な環境情報(≒センサ数)を減らす。そもそも小型機では、地形や岩で先が見えず、生成できる経路が極端に短くなり、計測制御精度も低いため経路計画が困難となる。そこで個体を空間に分散、流動化して探査能力を向上した。図3②に提案方式による探査結果を示す。洞窟を模した実験環境を右から左に区画と通路を面的に探査させ、移動中に先への経路・観測対象などが確率的に発見される。一方、N知能は、各個体の余剰処理能力による分散処理で実行され、群の編成や役割、群間協調などを担当して未知環境中を戦略的に生き抜く。ここでN知能は、図2⑥にある様に世代を超え、個体新陳代謝の流れの中で永続的に生き続けるAI機能の実体となる。
2. 機能構成の柔軟化と進化による状況適応能力
未知環境・状況への適応能力確保では機能の変更・更新さらに生成も鍵となる。機能のモジュール化により組換え可能な機能実現の仕組みにより、個体、群およびN知能の各機能を構成する(図3③)。非搭載モジュールの送信追加、モジュールの接続変更にて搭載機能は様々に構成できる。これにより様々な状況に対処し、将来的に機能の自動生成や進化へと繋げる。またネットワークを介した機能の相互利用により個体と群の能力が向上し、さらに機能群の分散実行がN知能の実行基盤になり、機体損失や通信障害等へも対処する。一方、計算機ではクロックを用いると電力と処理速度がTrade-off 関係になるが、モジュール化した機能の並列実行で省電力で高速動作を実現した。現在、提案機能制御アーキテクチャを搭載したソフトウェアとFPGAを利用した進化型機能制御装置を開発、宇宙仕様化も視野に試験中である(図3③右)。
3. 跳躍移動による走行性能の担保
車輪や走行機構の小型化で移動能力は低下する。物理能力の低下に加え、サイズと障害物(凹凸や岩)数の反比例関係が影響する。一方、軽量化で運動エネルギ(または衝撃)が減少、さらに衝突・転倒などが不可避と考えれば跳躍移動が能力回復の解となる。図1②の様にLEV1では方向(1輪)と跳躍(前進)の最小構成を月面で実証試験し、MSでは探査対象との柔軟な距離調整のため2輪+跳躍を採用、そこに月土壌との物理作用などを考慮した性能向上を検討、図2⑤の様な試作ロボットを開発した。さらに新しい発想を加えた機体、縦孔投入カプセル、拠点構築や長期探査を見据えた輸送・中継コンテナと展開構造に異種間の協働機能などのロボット技術についても研究中である。それら成果を活用し、現在、LEV1に続き、民間ミッション用の探査機のFlight Modelの開発を始めた。
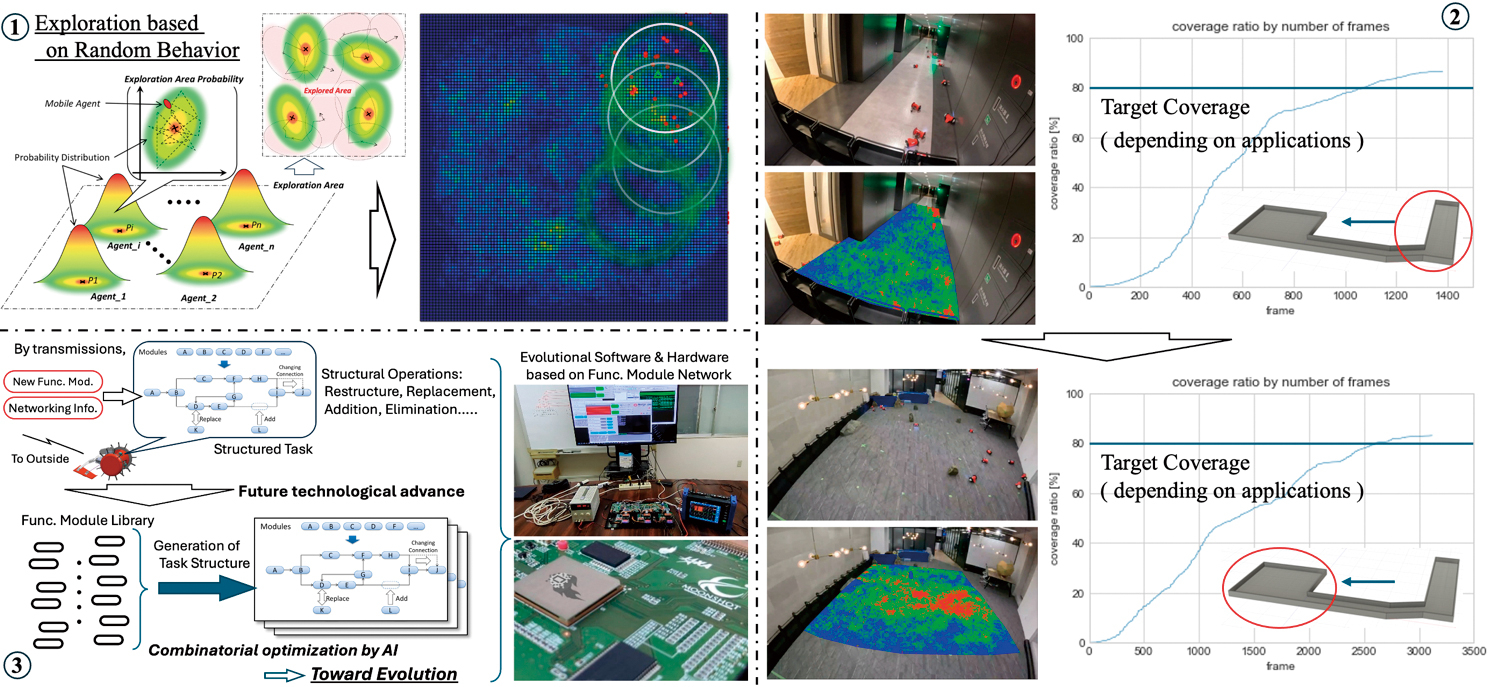
図3:群知能、分散共有型集合知能そして機能進化型制御機構の研究開発と実現
宇宙時代開拓期の幕開けに向けて
MSが目指す宇宙に生存圏が拡大した未来、その第一歩として2030年までに月に戻り、縦孔に進入して横穴の存在と居住適性を確認して2030年以降に企業などが参加する開拓期の扉に指をかける。幸いムーンショット、スターダスト、宇宙戦略基金などで研究開発成果の創出と人材集約が始まり、各成果の融合がなされれば開拓期の到来も夢ではない。だからこそ未来に向け、2030年までに可能性を示すことが望まれる。いま我々は、来たる未来に向けて、自らが研究開発する各種技術、装置等の全体または一部を活用・応用し、国内外の人々、プロジェクトと協力することを積極的に模索している。もちろん宇宙科学分野との協力も同様で、未踏環境の観測と知見は工学分野にも重要である。このような活動と月での実践の先にこそ、火星、その先のどこかの探査・開拓などが見えてくると信じ、真の宇宙時代の到来に寄与できることを望みながら今後も研究開発を続けて行く。ぜひ応援して頂けると幸いである。
【 ISASニュース 2024年11月号(No.524) 掲載】