
はじめに
人工衛星や宇宙ステーションは地球のまわりを回っている、これは周知の通りです。宇宙ステーションはおよそ高度400kmを飛行し、その軌道周期はおよそ90分ですが、高度を36,000kmまで上げてゆくと、気象衛星ひまわりのような静止衛星が飛んでいる静止軌道(Geostationary Orbit, GEO)となります。ケプラーの第三法則より、高度が高くなるほど軌道周期も長くなりますが、静止軌道の軌道周期はちょうど地球の自転周期と同じ約24時間となります。そのため、地上の観測者からみると、衛星はあたかも頭上でじっと止まっているように見えます。この顕著な性質により、静止衛星は、放送、通信、気象観測、など様々な分野で活用されています。本稿では、筆者が頂いた第13回宇宙科学奨励賞の研究内容から、イオンエンジンやホールスラスタに代表される低推力スラスタを用いて衛星を静止軌道まで遷移させる方法についてご紹介します。
静止軌道までの上昇
一般的に、静止衛星は静止軌道に直接ロケットで投入されることはなく、静止トランスファ軌道(Geostationary TransferOrbit, GTO)と呼ばれる中間軌道に投入されます。この中間軌道から静止軌道まで、衛星は搭載されたスラスタを用いて自力で軌道を上昇させる必要があります。従来、静止衛星は、遠点でアポジエンジンとよばれる強力な化学スラスタを噴射して、静止軌道に遷移することが一般的でした(図1A)。同様のことは惑星探査でも行われます。今年は、アメリカ、中国、UAE各国の探査機が火星に到着したことは記憶に新しいですが、探査機が地球から火星に向かう軌道も、上で述べた静止軌道への遷移方式と良く似ています。火星探査機の場合は、遠点で火星と会合し、化学スラスタを噴射して火星周回軌道に投入されます(図1B)。
図1A、Bに示すような、内側と外側の軌道を結ぶ楕円軌道を経由した遷移はホーマン遷移と呼ばれています。ホーマン遷移は比較的短時間(静止軌道の場合はおよそ半日、火星への遷移の場合はそれでも約9ヶ月! )で目標とする軌道に到達できますが、遠点側で強力な化学スラスタを噴射し、推進剤を多大に消費するというデメリットがあります。そこで、化学スラスタよりも排気速度が大きい(燃費が良い)電気推進スラスタによる遷移が注目されています。電気推進スラスタは推力がとても小さいため、軌道遷移に長い時間(静止軌道の場合は数ヶ月)がかかりますが、推進剤消費量を劇的に(およそ70 %~ 80 %程度)節約することが可能となります。例えば 2t 級の静止衛星の場合、化学推進だと1t 推進剤が必要なところが、電気推進にすることで300kgで済むことになります。これは打上げ質量の低減や、ミッションペイロードの拡充など大きなメリットとなります。電気推進を用いた軌道遷移では、一般に図1Cに示すようにスパイラル状に地球のまわりを数10 ~数100周と回りながら、徐々に軌道を上げてゆくことになります。
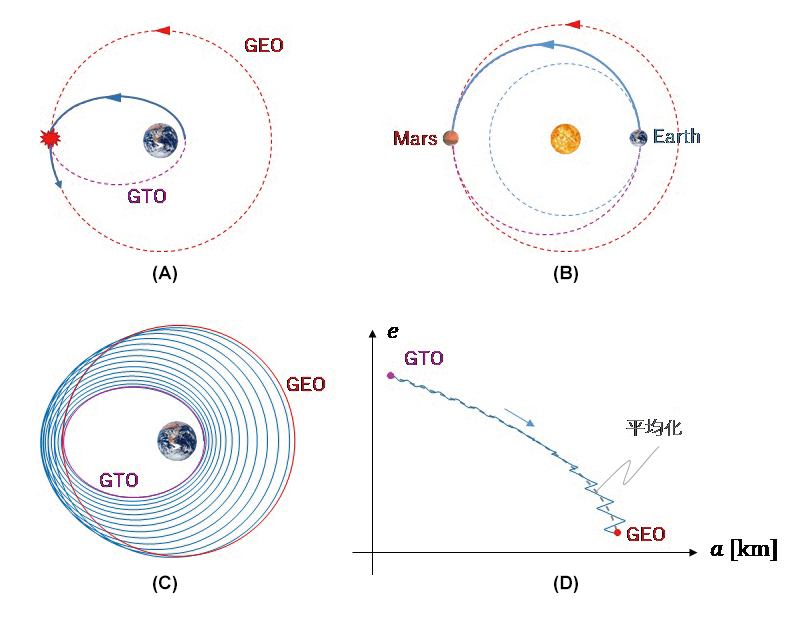
図1 静止トランスファ軌道から静止軌道までの遷移と地球から火星までの遷移。
A:静止トランスファ軌道から静止軌道までのホーマン遷移
B:地球から火星までのホーマン遷移
C:静止トランスファ軌道から静止軌道までのスパイラル遷移
D:スパイラル遷移中の軌道長半径と離心率の軌跡
最適な遷移軌道とは?
それでは、静止トランスファ軌道から静止軌道まで低推力スラスタでスパイラル遷移するとき、どのようにスラスタの噴射方向を決めれば最適な軌道遷移を実現できるのでしょうか?このとき、代表的な最適性の指標としては以下のようなものが考えられます。
①できるだけ早く静止軌道まで到達したい
(最短時間問題)
②推進剤の消費量を最小としたい
(推進剤消費量最小問題)
③制御加速度のエネルギーを最小としたい
(エネルギー最小問題)
①と②の問題は工学的に重要ですが、解析的な解を求めるのが困難です。一方で、③については、平均化の理論や最適制御の理論を用いるとうまく解を求めることができます。ここでは、まず③について紹介したあと、①の問題について考えてみます。
エネルギー最小問題とは、スラスタ噴射によって生じる加速度の二乗を時間積分したもの(エネルギー)ができるだけ小さくなるような遷移軌道を求める問題です。この本質はスラスタ推力を可変とすることを許容しつつ、推薬消費を小さくすることにあります。この問題を解くために重要なポイントは以下の2つです。
・平均的な振る舞いに着目する(平均化法)
・状態変数をうまく選ぶ(正準変換)
今、簡単に2次元で考え、衛星はあるXY平面上を運動すると仮定します。このとき、時々刻々の衛星の状態は位置2自由度、速度2自由度の合計4次元で記述することができます。位置X、Yの軌跡を描いたのが、図1Cに相当します。ただし、衛星の状態はXYの直交座標系以外でも表現することができます。有名な表現方法は軌道要素と呼ばれるもので、衛星の状態を楕円の長半径、離心率、近点引数、真近点離角の4変数で表現できます。図1Cの軌道を、長半径aと離心率eの世界で眺めると、図1Dのようになります。直交座標系XYでは何周もぐるぐると回っている軌道が、aとeの世界では図1Dの実線で示すように振動しつつも比較的単純な軌道になっていることがわかります。この振動を除去し、平均化すると図1Dの点線のように更にシンプルになります。このように、変数のとり方をうまく選びつつ、平均的な振る舞いに注目することで問題を考えやすくすることができるようになります。紙面の都合で詳細は割愛しますが、最適制御や解析力学の理論を用いて更に変数をうまく変換することで(正準変換)、エネルギー最小遷移問題を、ある仮想的な平面(ξη平面とよぶことにします)上での2点を結ぶ軌道を求める問題に帰着させることができます(図2上)。ただし、このξη平面上では、距離の二乗に比例する中心力が働きます。現実世界では、地球の重力は距離の二乗に反比例しますが、この世界では、距離の二乗に比例する斥力もしくは引力となるところが面白い点です。中心力が引力か斥力かは、静止軌道までの軌道周回数を多くするか、少なくするかに依存します。図2の左下は斥力の場合で、軌道周回数が短いケースです。逆に右下は引力の場合で、周回数が長くなります。中央の図は中間ケースです。これらは、いずれもある指定された遷移時間と周回数に対してエネルギー最小となっています。
この「距離の二乗に比例する斥力もしくは引力が働く世界で、与えられた2点を結ぶ軌道を求める」問題の、解は解析的に求めることが可能です。解析的に解が求められると嬉しいことはなんでしょうか? 1つは、複雑な計算をしなくても、(エネルギー最小の観点で)最適な噴射方向を決定できることです。これは衛星搭載計算機のような計算パワーが潤沢でない場合にメリットとなります。別のメリットとしては、エネルギー最小解をもとに、別の問題(最短時間問題、推進剤消費量最小問題など)を解くことができる点です。工学的により実用的な最短時間問題や燃料最小問題は解析的な扱いが難しいため、数値的な計算に頼ることになりますが、数値的に最適化する場合の初期解としてエネルギー最小解を活用できるのです。
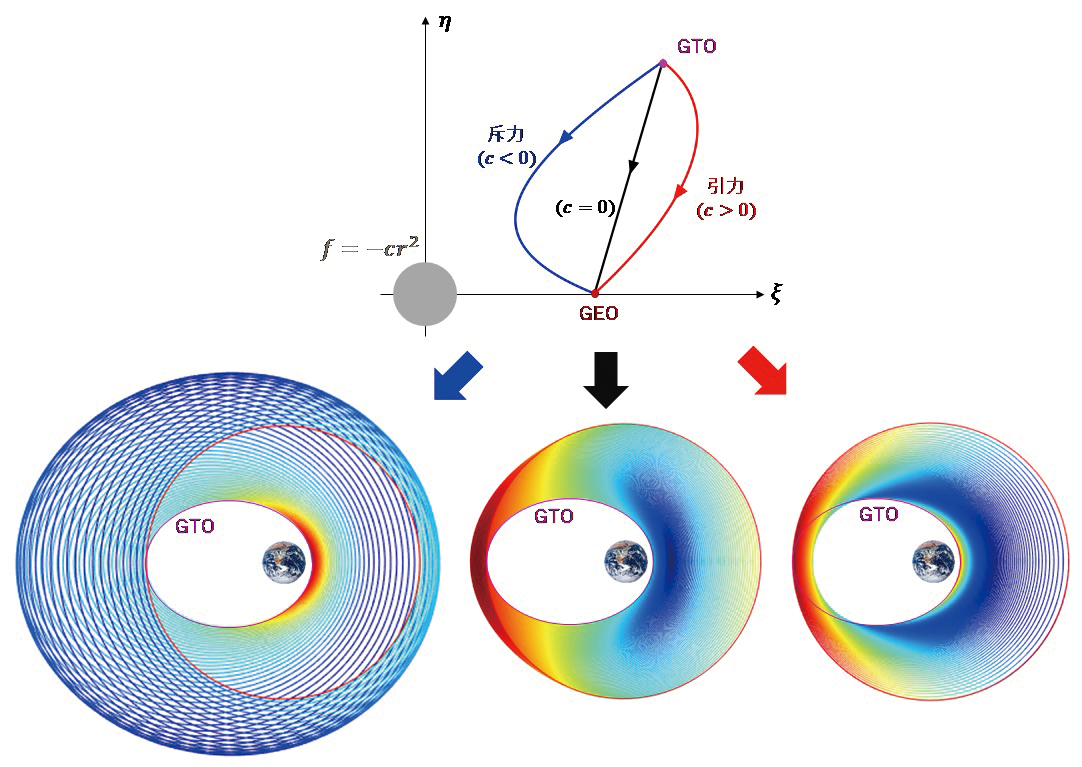
図2 エネルギー最小遷移軌道の比較。
軌道図の色は加速度の大きさを表しており、赤色になるほど大きい。
最短時間問題
次に、最短時間問題について考えてみましょう。最短時間問題とは、その名の通り、できるだけ短い時間で静止軌道まで到達する問題です。冒頭で述べたとおり、低推力エンジンによる軌道遷移は一般に数ヶ月の時間を要するため、打ち上げてからミッション開始までの時間をできるだけ短くするためにも最短時間問題は実用的に重要となります。最短時間で軌道遷移を完了するためには、常にスラスタを噴射し続けながら、時々刻々のスラスタの噴射方向を適切に制御する必要があります。
もしも軌道上での衛星の運動を完全に予測することができれば、予め地上の計算機で最適な噴射方向を計算しておき、それを衛星にアップロードしてスラスタをその方向に向ける、というような運用ができるでしょう。しかし、軌道上での想定外の事象(スラスタの故障、シャットダウン等)が起こると地上で再度計算をやり直す、というような手間が発生します。また、想定外というほどの事象が起こらずとも、地上で前提としている衛星の力学モデルと実際の軌道上でのモデルの間には多少の差異が必ずあるため(質量特性誤差、スラスタ推力誤差、大気抵抗誤差など)、地上で予想される軌道と実際の軌道が徐々にずれてゆきます。この場合も定期的に地上で計算をやり直すことが必要となります。このような想定外の事象や徐々に蓄積されてゆく誤差に対してロバスト(頑強)にするための方策として、フィードバック制御則を用いることが考えられます。これは、衛星が今の自分の状態をもとに、目標軌道(静止軌道)に最短時間で到達するために適した噴射方向を算出するという制御方法です。図3に軌道長半径を変化させるために最適な噴射方向と、離心率を変化させるために最適な噴射方向を矢印で示しました。これらの矢印を重ね合わせることで、時々刻々の噴射方向を計算することができます。とくに、この重ね合わせの割合を「目標軌道要素-現在の軌道要素」の差分に応じて適切に設定することで、フィードバック制御の構造を持たせつつ、目標軌道(静止軌道)に最短時間で到達するために準最適な噴射方向を実現することができます。
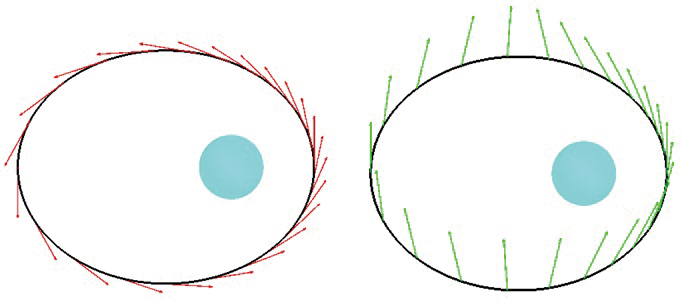
図3 長半径aの制御に最適な噴射方向(左)と離心率eの制御に最適な噴射方向(右)。
ここまでは、衛星の軌道運動すなわち、並進運動について話を進めてきました。しかしながら、衛星の姿勢も電気推進スラスタを用いた軌道遷移では重要となります。電気推進スラスタは電気エネルギーで推進剤を加速させて排出することで運動量を得ます。消費エネルギーが大きいため、衛星の太陽電池パドルを太陽の方向に向け続けて発電効率を確保する必要があるのです。一般的に静止衛星の太陽電池パドルはある一軸まわりに回転することができます。この回転自由度を用いると、太陽電池パドルを太陽に向けつつ、スラスタの推力軸が望ましい方向を指すような衛星の姿勢が定まります。ただし、衛星のとるべき姿勢が指定されたとしても、その姿勢に常に追従するように制御できるとは限りません。衛星の姿勢は、リアクションホイールに代表される姿勢制御アクチュエータによって制御されますが、姿勢制御アクチュエータによって発生できるトルクや角運動量には上限があるからです。したがって、トルクや角運動量の制約を考慮しつつ、軌道と姿勢を制御することが必要となります。図4左は、姿勢制御アクチュエータの制約を考慮しないでフィードバック制御で軌道遷移した場合の衛星の角運動量の分布を示しています。この場合、角運動量が非常に大きくなる区間があり、実際にはこのような制御は実現できません。一方で、図4右は角運動量とトルクの制約を考慮したフィードバック制御則であり、角運動量の履歴は現実的な値となっています。なおアクチュエータ制約を考慮しても、遷移日数の増加は微小となっています。
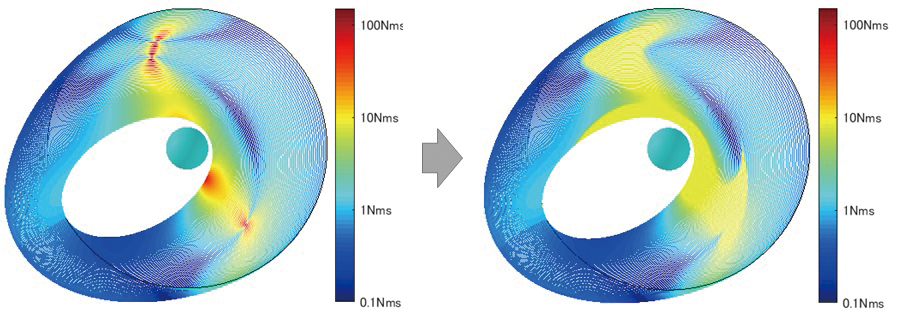
図4 遷移軌道に沿った角運動量の分布(左:姿勢制約を非考慮、右:考慮)。
おわりに
低推力かつ多周回の軌道遷移は理論も実運用も複雑となりますが、非常に面白い問題構造をもち、今後も活発な研究がなされる分野と考えられます。ホールスラスタやイオンエンジンの技術成熟度が向上したことで、商用衛星や月探査などでも低推力多周回の軌道遷移は化学推進に変わる現実的なオプションとなりつつあります。商用通信衛星では、通信の大容量化の需要に伴いペイロード比率の向上が求められていますが、電気推進によってペイロード輸送効率が高まることにより、商用衛星においては私達が享受する衛星サービスの向上が期待されます。また探査ミッションではミッションペイロードの拡充によって探査の質と量が高まり、新しい発見へとつながることでしょう。
謝辞
本稿に関連する研究を進めるにあたって、(元)大阪大学の山田 克彦教授をはじめ、三菱電機 先端技術総合研究所、鎌倉製作所の皆様には貴重な助言を数多く頂きました。この場を借りてお礼申し上げます。
【 ISASニュース 2021年5月号(No.482) 掲載】