
自家用車でどこかへ旅行する計画を立てるとき、目的地を決めたあと真っ先に考えることは何だろうか? おそらく多くの人は「移動ルート(と、その所要時間・ガソリン代等のコスト)」を考えるのではないだろうか? 宇宙ミッションにおける軌道設計(Trajectory Design)は、この「移動ルート」の計画を立てることである。軌道を設計するためには、科学的な要求や技術的な成立性を合わせて複合的に考える必要があるため、それらを引っくるめてミッション・デザイン(MissionDesign)と呼ぶこともある。自家用車でドライブする場合、近年、カーナビやGoogleマップが普及したため、綿密な計画を立てずとも目的地に到達できるようになった。しかし、宇宙の旅は、現状、軌道設計の専門家に頼らないと飛行ルートを決めることができない。本稿では、軌道設計の難しさ・軌道設計研究が目指す世界について、筆者の研究内容を交えながら紹介する。
軌道を創る職人芸
「ひてん」(MUSES-A)に始まり、宇宙科学研究所は軌道設計の創意工夫により挑戦的なミッションを実現してきた。現在、2024年度内の打上げを目指して計画中である深宇宙探査技術実証機DESTINY⁺(デスティニープラス)も、「ひてん」、「のぞみ」(PLANET-B)が用いた月スイングバイ(および太陽潮汐力※1)による軌道操作技術と、「はやぶさ」(MUSES-C)、「はやぶさ2」が用いたイオンエンジンによる軌道操作技術の合わせワザで、小型のイプシロンSロケットによって地球周回軌道から小惑星(3200) Phaethonを目指す挑戦的ミッションといえる[1]。ここでスイングバイとは、月・惑星の重力を効果的に用いて加速・減速する軌道設計のワザである。『月・惑星』というテニスラケットで、前方後方に走りながら「探査機」というボールを跳ね返すイメージを持ってもらえるとほとんど正解である。また、イオンエンジンは静電気の力(クーロン力)を用いて、電荷を帯びた物質(イオン)を加速して噴射させる効率の高いエンジンである。イオンエンジンは高効率である(少ない燃料で大きく軌道を変えられる)反面、推力が小さいため、ゆっくり長時間動作させる必要がある。このようにDESTINY⁺の軌道設計は、持てるワザを全て出し尽くした最上級に難しい軌道を用いていると言って過言ではない(その軌道図を下図および図1に示す)。そして、このように難しい軌道を航行して、イオンエンジンで地球周回軌道から深宇宙空間へ飛び出した探査機は未だかつてない。高価で大きなロケットで飛ばせば苦労しないかもしれないが、限られた予算の中で(低価格なロケットを用いて)頻度高く深宇宙探査を実現可能とするための日本らしい工夫である。
特に、打ち上げてから最初の月スイングバイを迎えるまでの期間(「スパイラル軌道上昇フェーズ」と呼ぶ。図1の(A)は、約1.5年間ほとんど連続的にイオンエンジンを動作させた後、然るべき時刻・位置・速度で月スイングバイを行う必要があるため、難易度の高い軌道制御技術が求められる。例えば、「はやぶさ」が経験したようなイオンエンジンの予期せぬ停止が起こったとしても、あるいはイオンエンジンによる軌道制御量に誤差があったとしても、月スイングバイは正確に行うことが求められる。宇宙を航行する探査機の軌道は、通常、ニュートンの運動方程式を用いて、非常に正確に予想できるのだが、DESTINY⁺の地球近傍軌道は、こうしたイオンエンジンの予期せぬ停止や軌道制御誤差といった不確定性への対策が課題になる。

DESTINY⁺の地球近傍軌道の例
DESTINY⁺はイオンエンジンを連続的に用いて地球周回軌道から徐々に軌道高度を上げていく。太陽潮汐力をも駆使しながら2回の月スイングバイをこなし小惑星(3200)Phaethonへ向けてようやく深宇宙へ飛び立つ。軌道設計のワザを駆使することで、小型のイプシロンSロケットであっても深宇宙探査が可能になるミッションである。2024年度打上げ予定。


図1 DESTINY⁺の飛行軌道の例(上図:地球中心・慣性座標系における地球近傍軌道拡大図、下図:太陽中心・慣性座標系における惑星間軌道図)。上図で渦巻きに見える箇所(A)が「スパイラル軌道上昇フェーズ」であり、イオンエンジンを約1.5年間ほとんど連続的に動作させる必要がある。複数回の月スイングバイ(B)と太陽潮汐力(C)による軌道制御を使うことで地球出発エネルギーを増大させることができる。
挑戦を諦めないための軌道
「イオンエンジンの予期せぬ停止」や「軌道制御の誤差」という不確定性がある中で宇宙ミッションを成功させるためには、大きく分けて2種類の対処法がある。「(設計上問題にならない程度まで)不確定性を小さくする」という対処法と「不確定性が大きくても耐えられる設計にする(専門用語で"ロバストな"設計と呼ぶ)」という対処法である。前者の究極は、決して停止しない・軌道制御誤差の無いイオンエンジンを作るという対処法になる。もちろん、イオンエンジンが止まらない方が良いし、誤差も小さい方が良いが、こうした設計は往々にして大きなリソース(時間・コスト・重量)が必要になる。また、十分に成熟した"枯れた技術"である必要もある。逆に、全く新しい技術・難しい技術に挑戦していくためには、「不確定性が大きくても耐えられる設計にする」対処法の方が求められる。
「はやぶさ」を始め、「PROCYON」(プロキオン)でもイオンエンジンの不確定性を目の当たりにした筆者は、博士研究の頃から「不確定性を考慮しても失敗に陥らないような軌道設計("ロバストな"軌道設計)」をテーマとして研究を続けてきた[2]。図2に示すように、ロバストではない軌道設計では、予期せぬトラブルが発生した際に、目標地点へ到達できず、ミッション喪失を招き兼ねない。そこで、トラブルがあっても立ち直れるように軌道制御能力に余裕を持った設計にしておくことで、ロバストな軌道設計が達成される。筆者らは、不確定性を考慮した軌道"群"をまとめて最適化計算することで、このようなロバストな軌道設計を実現した。図3に示すように、地球から火星へ電気推進で遷移する軌道に対して、提案する手法を軌道設計に適用することで、(より小さなばらつきで)より安全に・より効率的に軌道を遷移できるようになることがわかる。本研究を発展させて、「あかつき」(PLANET-C)の金星周回軌道投入のように仮に最初の軌道投入が不成立であったとしても、ずっと短時間で再び軌道投入可能となる軌道設計手法を提案し、火星衛星探査計画MMXへも適用可能なことを示した[3]。応用として、「のぞみ」では急遽採用されたようなバックアップ軌道も予め想定しておいて、最悪の事態に至らないような軌道計画を立てることも可能となる。不確定性が大きくても成立する軌道を積極的に採用することは、「IKAROSのようなソーラーセイル探査機」、「火星大気を用いて軌道投入するエアロキャプチャ」、「全く新しい推進系」、「未知の重力環境を持つ小惑星探査」などの新しい技術・探査スタイルに挑戦し続けることを可能にすることでもある。このような軌道設計技術を通じて、新しい技術に挑戦することを諦めない世界を作りたいと考えている。
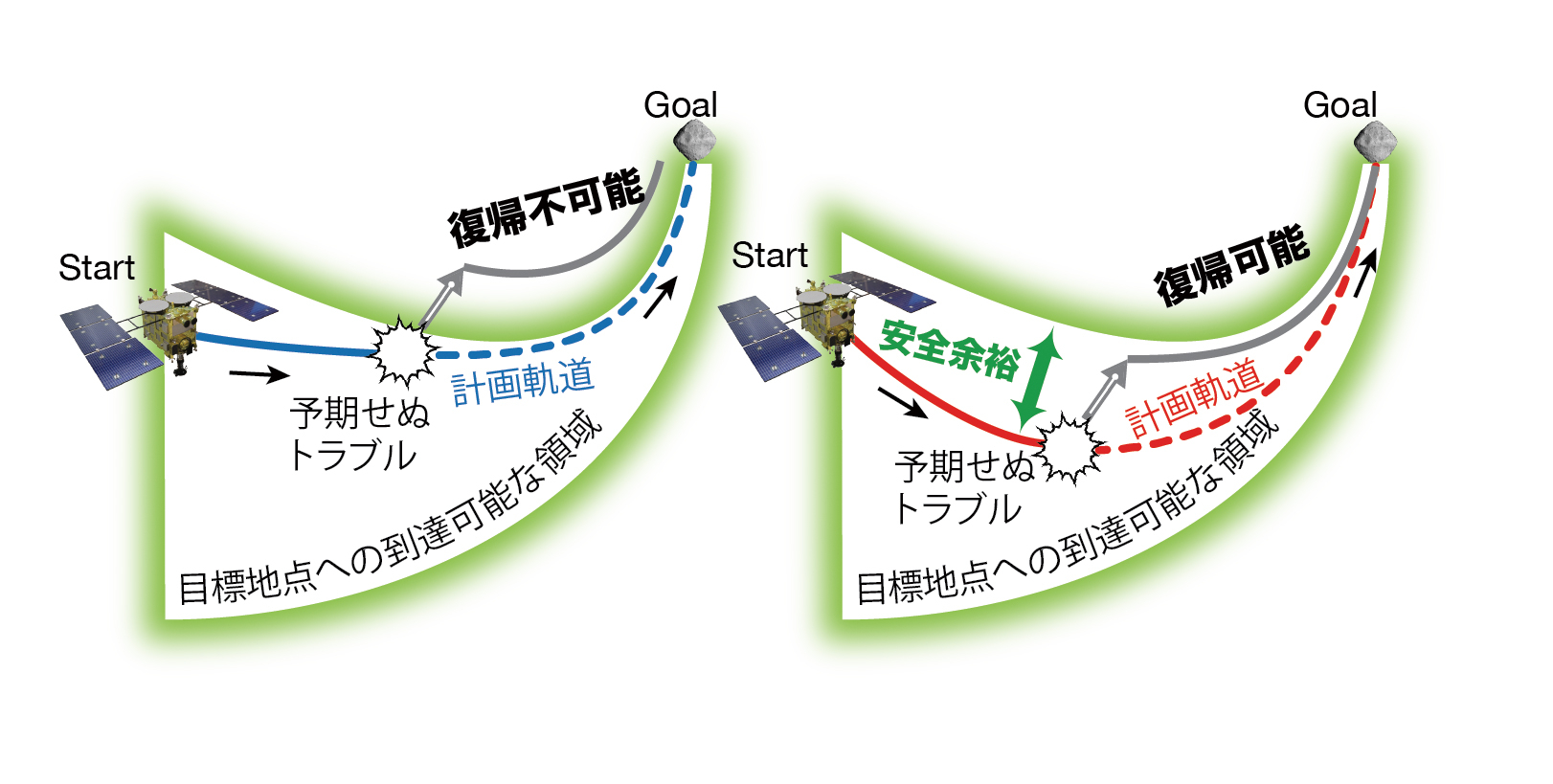
図2 不確定性を考慮しても失敗しないような "ロバストな" 軌道設計。

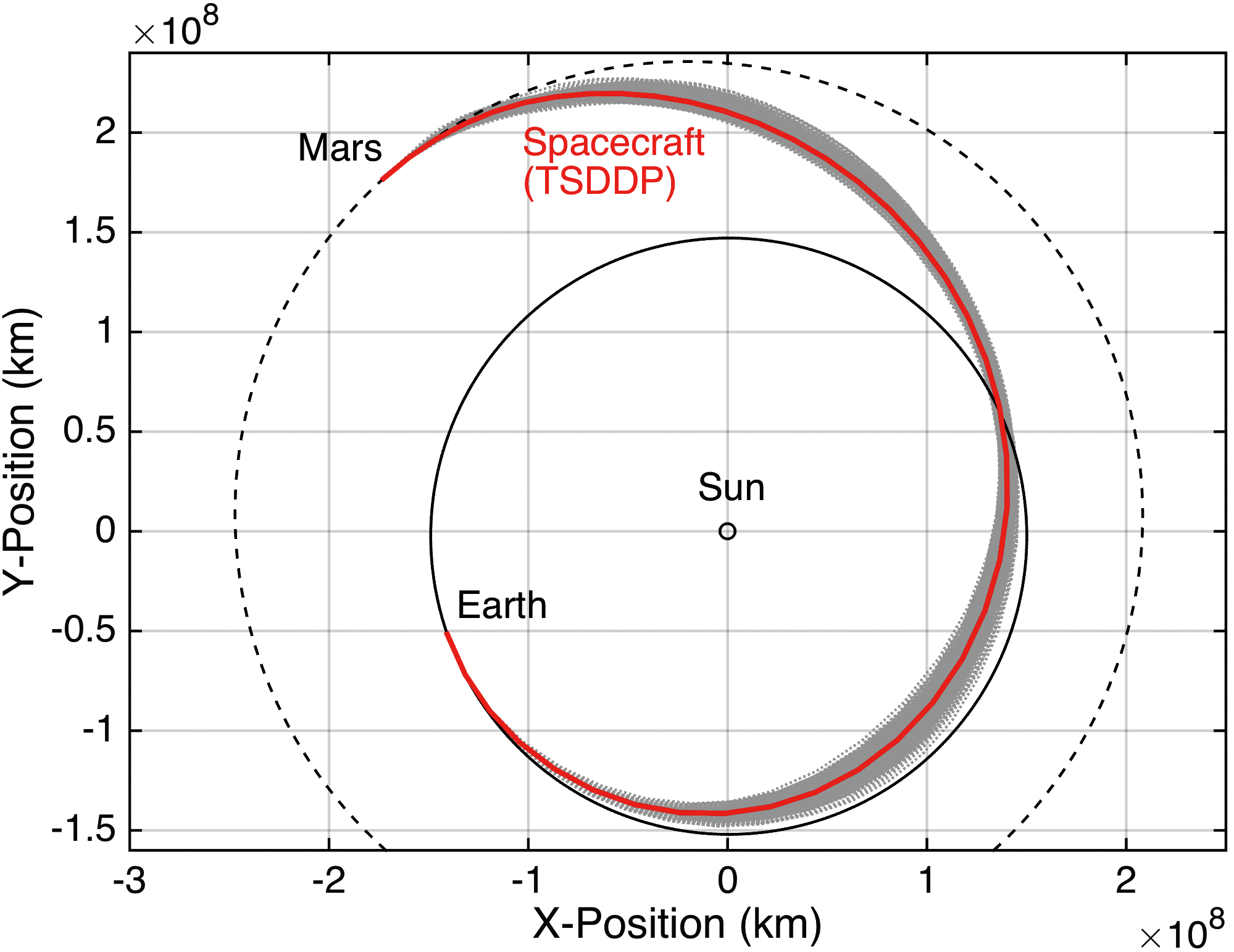
図3 イオンエンジンの停止・誤差の影響を考慮しても安全に火星に到達できる軌道設計(上図:従来の手法、下図:提案手法。青・赤色の実線は計画軌道、灰色の点線は不確定性の影響で逸れた軌道。但し、軌道誤差を5倍に拡大して表現。提案手法は従来手法より小さなばらつきで軌道を遷移できることがわかる)。
軌道をつくるAI (人工知能)
冒頭でも述べたが、現状、限られた軌道設計の専門家に頼らないと探査機の飛行ルートを決めることができず、深宇宙探査ミッションを計画できない。お陰様で大変ありがたいことに、多くの研究者に「○○へ行く軌道を設計して欲しい」と頻繁に頼まれている。しかし、今後、「月軌道ゲートウェイ」(Lunar Orbital Platform-Gateway)の開発や「PROCYON」「EQUULEUS」(エクレウス)といった超小型深宇宙探査機の発展によって深宇宙探査ミッションの数が益々増大することが予想される。そのような時代において、「軌道設計職人に頼らないと飛行ルートを決められない」という状況は非常に不便である。そうした状況を打破するために、近年、世界中でAIを用いた軌道設計の研究が始まっている[4]。すなわち、誰もが使える宇宙版のGoogleマップを実現する研究である。軌道設計は、前述のように「スイングバイ」等の複雑なワザを駆使することが通例であり、設計解の探索が難しく、その自動化、AI化も一筋縄にはいかない。実は日本は、米国と比較して軌道設計の専門家の数が1 〜 2桁ほど数が少ない。だからこそ、AIを駆使した軌道設計の自動化のニーズは一層高い。軌道設計需要の増大と人材難の課題を一挙に解決する好機と考え、軌道設計の自動化研究で世界と勝負していきたいと考えている(科研費・学術変革領域研究(B)20 H 05749)。
筆者は、DESTINY⁺を通じて軌道設計の自動化も推し進めたいと目論んでいる。DESTINY⁺の軌道設計は、専門家も唸る難しい問題である。その軌道設計の自動化ができるなら、多くの問題に容易に適用できるようになると考えている。更に、DESTINY⁺ではイオンエンジンの予期せぬ停止や軌道制御誤差によって何度も軌道計画を立て直す場面が出てくるかもしれない。軌道設計の自動化を進めることで、DESTINY⁺のミッションを着実に成功させる後押しをしたいと考えている。
僕の生きる軌道(みち)
筆者が研究者人生の集大成を迎える2050年代(30年後)、世界では何が起きているだろうかということをいつも考えている。宇宙探査の分野では、地球外生命探査・外惑星探査が一層活発化しているだろう。もしかすると地球外生命が発見され、人類は月・火星に都市開発が進行し、太陽系外に探査機を飛ばしているかもしれない。更には、地球上ではシンギュラリティを迎えてAI・データ革命が起きているかもしれない。そうした世界では、今の常識では考えられないような「(地上との通信無しで)自律的にミッションを遂行してサンプルリターンできるような探査機」や「(故障しても)自己修復する探査機」が宇宙空間を飛んでいても不思議ではない。
軌道設計の分野では、軌道設計の職人が魔法のように斬新な軌道を見つけ出す世界は少しずつ終わりを迎えようとしている。宇宙版Googleマップが実現し、専門家に頼らずに飛行ルートを決められる世界は、軌道設計の職人の端くれとして少し寂しいような気もする※2。逆に研究者としては、今では全く予想できないような課題に直面するのだろうと考えてワクワクする。そのようなワクワクする世界の実現に向けて、何かしらの形で貢献することが筆者の夢である。
参考文献
[1] 尾崎 直哉、山本 高行、ディトス・ディオジェネ、他、"DESTINY+の軌道計画に関する初期検討" 第63回宇宙科学技術連合講演会、2I 05、徳島、2019年11月
[2] Naoya Ozaki, Stefano Campagnola, and Ryu Funase, "Tube Stochastic OptimalControl for Nonlinear Constrained Trajectory Optimization Problems, " Journalof Guidance, Control, and Dynamics, Vol. 43 , No. 4 , April 2020 .
[3] Naoya Ozaki, Takuya Chikazawa, Kota Kakihara, Akihiro Ishikawa, and YasuhiroKawakatsu, "Extended Robust Planetary Orbit Insertion Method UsingProbabilistic Uncertainties," Journal of Spacecraft and Rockets, Vol. 57 , No. 6 ,November-December 2020 .
[4] Dario Izzo, Marcus Martens, and Binfeng Pan, "A Survey on ArtificialIntelligence Trends in Spacecraft Guidance Dynamics and Control,"Astrodynamics, Vol. 3 . No. 4 , pp. 287 - 299 , 2019 .
※1 地球近傍において太陽重力および公転運動する地球の遠心力が場所によって異なることで生じる力。
※2 仮に宇宙版Googleマップが実現したとしても、理学・工学的な要求を複合的に扱い、人間の意思決定が必要となるミッション・デザインは依然として、人間の創造性が必要になると考えている。
【 ISASニュース 2021年3月号(No.480) 掲載】