
はじめに
自転車で日本中を旅するのが好きです。毎回、旅に出る前に装備をまとめますが、荷台のない自転車で旅をしているため、すべての荷物は自分の肩で背負わなければならず、持っていける重さに限りがあります。パンクなどのしょっちゅう起きるトラブルに対しては、必要な工具や替えのチューブなどは常に持っていきますが、それ以外にも旅先で発生し得るトラブルを想定して、重量の制約の中で持っていくものを決めます。この選択には、旅するエリアも影響します。北海道のオホーツク海側や、四国の山中を旅した時は100km近くコンビニや店舗はなく、バスなどの交通機関も乏しいので、チェーンが切れた場合を想定してチェーンカッターなども持っていきました。
私が従事している探査機のシステム設計も、この準備に似ています。限られた質量の中で、将来起き得る事態を見据えた上で、最高効率な組み合わせを準備することが鍵になります。地球圏の人工衛星は地上の迅速なサポートを期待できますが、「はやぶさ」、「はやぶさ2」、そしてMMX(MartianMoons eXploration)を代表とする深宇宙ミッションの探査機システム設計は、ある意味、コンビニなどのサポートを全く期待できない地域を自転車で走る時の準備の考え方に近いかもしれません。
MMXミッション概要
MMXミッションの第一の目的はフォボスからのサンプルリターンです。これまで火星圏までを往復した探査機は存在しないため、成功すれば世界初の快挙になります。MMXミッションで使用する探査機は、現在開発中のH3ロケットの最も打ち上げ能力の高いタイプで打ち上げられますが、これは火星圏という重力の谷へ一旦降りて、再びそこから戻ってくるために2度の大きな減速、加速を必要とし、搭載する推進薬量が大きいためで、MMX探査機の大きな特徴となっています。
火星圏に到着後は、まず1年半を掛けて、フォボスの表面に安全に着陸するための観測を優先して行い、なるべく平坦で広い地域を着陸候補地として選定します。着陸地点が決定された後もいきなり着陸することはありません。事前にリハーサルを行って地表を観測したり、欧州協力ミッションであるローバーを投下し、フォボス表面の特性、特に硬さなどを事前に計測したりします。本番の着陸はMMXミッションを通じて最も危険性が高く、地上との連携を極力高い状態で実施しなければなりません。そこで、地球と火星の距離が短く、高レートでの通信が期待できる火星圏滞在期間の中間時期に行います。合計では2回の着陸を想定しており、2箇所からのサンプル採集を実施します。
その後は、地球へ帰還を開始するまでの残りの期間をフォボス近傍で過ごし、さらなる詳細なフォボスの観測や、火星の観測を行います。いよいよ火星圏を離脱する際には、途中の軌道を調整して、ダイモスの近くをフライバイし、詳細観測します。その後、打上げから5年後に大量の観測データと共に、フォボスの貴重なサンプルを地球へ持って帰ってくる予定です。
MMX探査機設計の主な判断ポイント
MMX探査機を設計していくに当たって、いろいろと方針を決めなければならない重要な判断ポイントがありました。システム設計の醍醐味の1つとも言えます。ここでは2つほど挙げてみます。
例1) 化学推進系か電気推進系か?
MMX探査機と「はやぶさ」、「はやぶさ2」が大きく異なる点の1つとして、往路・復路共に化学推進系としたことが挙げられます。MMX探査機では推進系で発生しなければならない加速度の合計が、「はやぶさ」・「はやぶさ2」と比べて約2倍あり、また、ある程度の重力のある天体へ着陸することから、MMX探査機の推進系はトレードオフによって決定する必要がありました。
往路は復路の推進薬も搭載しているため質量が大きく、火星圏に投入するためには大推力が必須です。特に火星近傍では太陽光強度が地球軌道の半分未満に落ちてしまうことから、電気推進を使う場合は、太陽電池が非現実的な大きさになります。そこで、往路は化学推進に決定した上で、復路を化学推進としたA)案と、電気推進としたB)案の二案を検討しました。また、それぞれを火星圏への滞在期間を1年もしくは3年とし、2案ずつの合計4案でトレードオフしています。結果は表-1に示します。
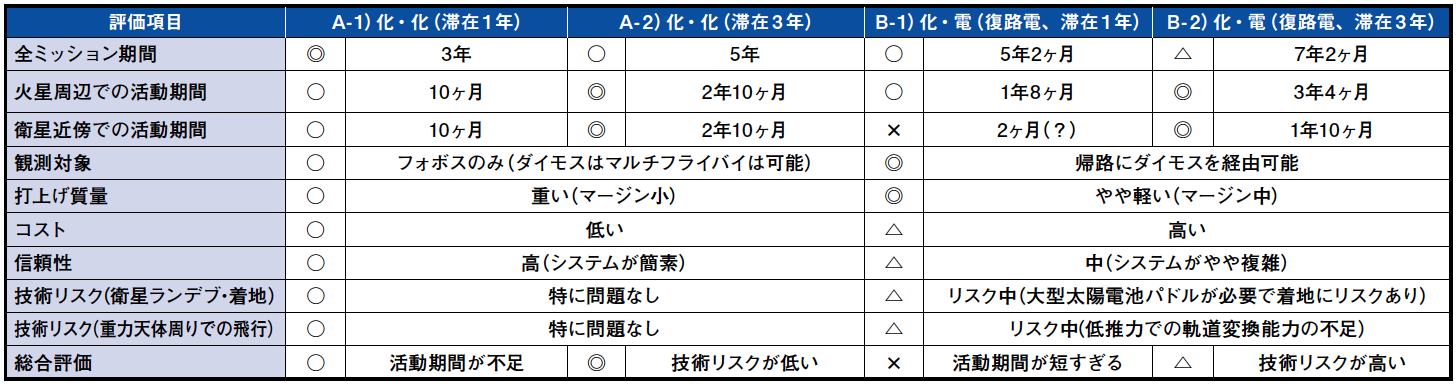
表-1:化学推進vs電気推進でのトレードオフ結果
(本評価は2016年時点のもので、その後評価が若干変動したものもありますが、結論は変わっていません)
【候補とした案】
A-1) 往路、復路ともに化学推進。火星滞在1年。
A-2) 往路、復路ともに化学推進。火星滞在3年。
B-1) 往路は化学、復路は電気。火星滞在1年。
B-2) 往路は化学、復路は電気。火星滞在3年。
結論としては、電気推進よりも重くなるのですが、往路・復路共に化学推進系を使用することにしました。これは、フォボスへの着陸の検討が進み、電気推進のために大きな太陽電池パドルを持った機体では、転倒や地面接触のリスクが高いことが判ってきたことが大きな理由です。また地球帰還までの日数が、化学推進系と比べて2年2ヶ月余計に掛かることも、一刻も早くサンプルを入手したい惑星科学者からは不評でした。
火星圏滞在期間としては観測要求が増えることを予測し3年のケースを選択しました。その後のフォボス観測運用の詳細化により、1年では全ての目的を達成できそうもないことが判りました。火星圏滞在3年の選択は正しかったと思います。
例2) 3本脚か4本脚か?
フォボスは、イトカワ、リュウグウと比べると大きな重力があります。月面のように体感できるような重力とはほど遠いですが、もしバケツに水を入れてフォボスの地表へ行けば、水は表面張力で丸くならずに底の方に溜まるでしょう。MMX探査機の着陸の検討を進めるにつれて、このような重力のある地表へ降り立つには、本格的な脚が必要なことが判ってきました。
これまでの探査機では脚の本数は3本か4本です。米国のランダーは月に初めて軟着陸したサーベイヤー1号をはじめとして3本脚が多い一方、アポロ計画での月着陸機は4本脚です。表-2にトレードオフを示します。3本脚は常に全ての脚が接地している利点はあるものの、転倒に対する余裕が4本脚よりも小さくなります。フォボスの表面重力程度ではリバウンドする恐れがあるため、安定度の高い4本脚を選択しました。
このトレードオフの際に頭に浮かんだのは乗用車です。現代の乗用車はほぼ4輪ですが、3輪の瀟洒な乗用車も多数あった時代もあります。やはり転倒しやすいことが敬遠されたのでしょう。
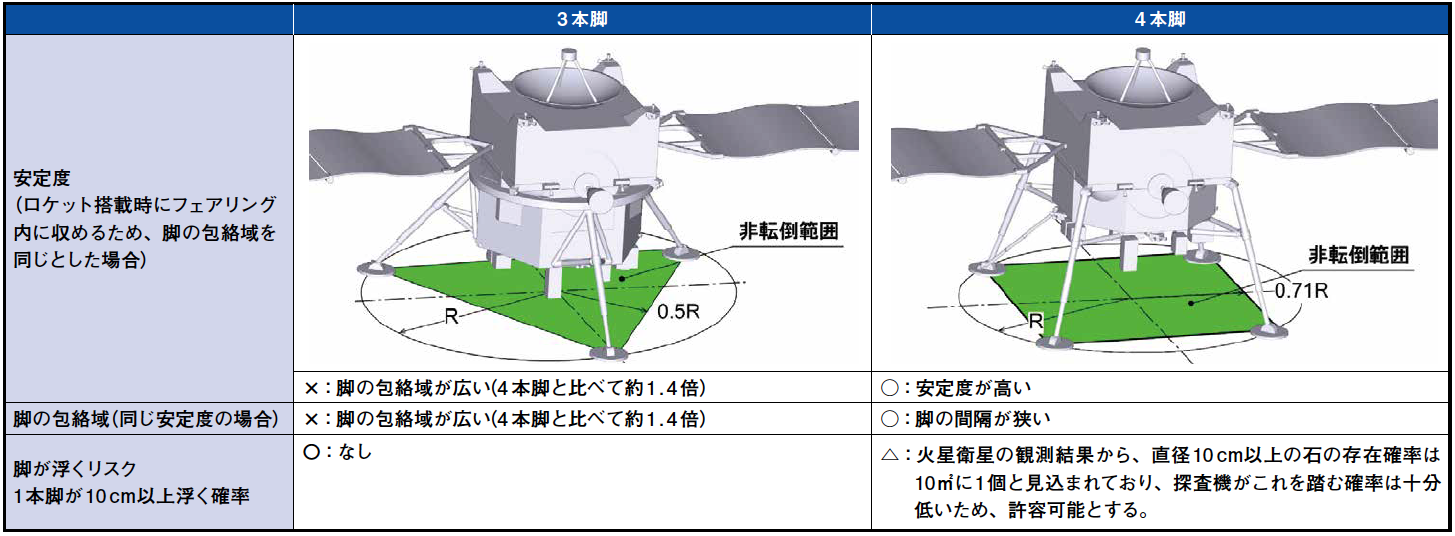
表- 2:3本脚と4本脚のトレードオフ
MMX探査機設計の変遷
前項で示したような判断ポイントを経てMMX探査機の設計を進めました。検討の進捗に伴い外形も計画当初から大きく変化しています。図-1にその変遷を示します。
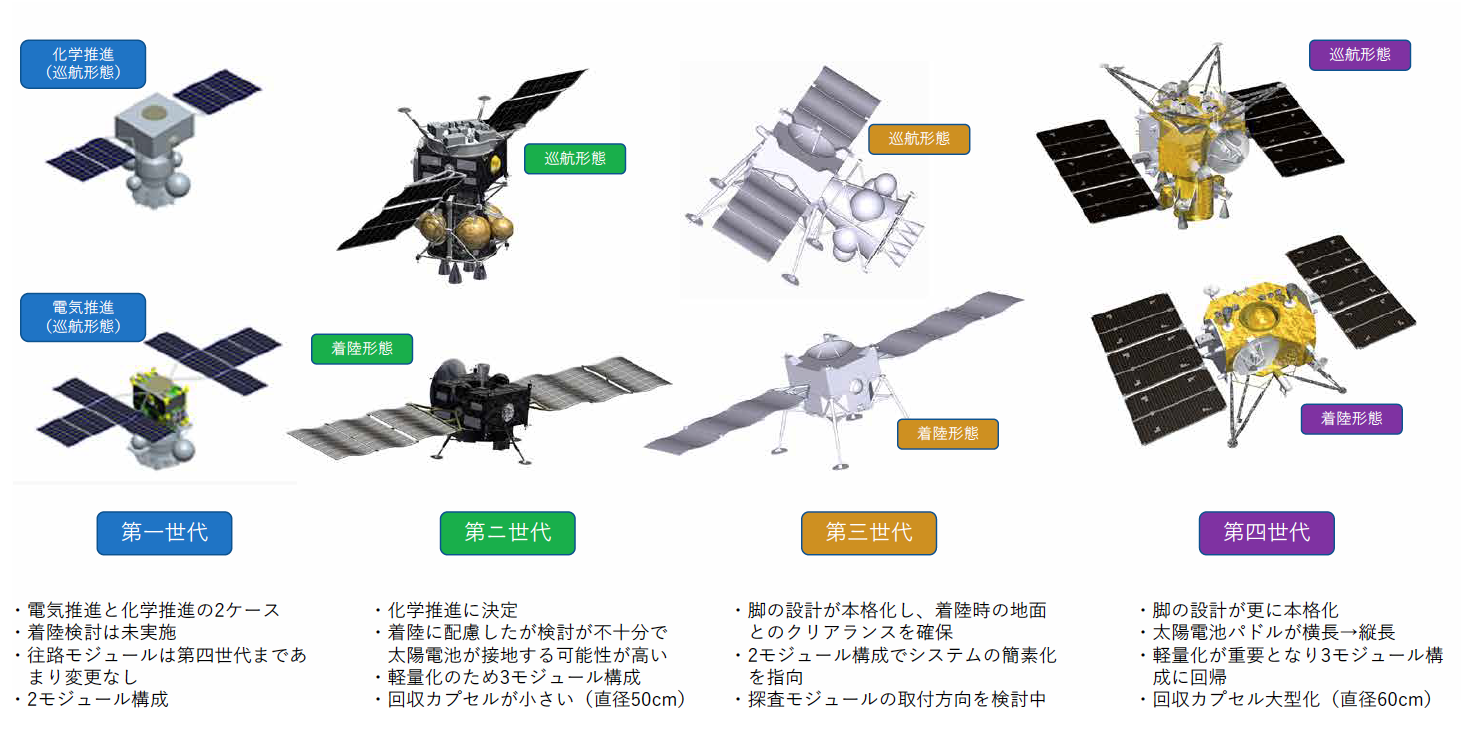
図-1 探査機コンフィギュレーションの変遷
i. 第一世代(2015年~ 2016年)
当時は火星圏との往復の実現性について集中して検討していました。使用する推進系を、電気推進にするか化学推進にするかが未決定であったため、形態としては2種類あります。火星近傍では太陽光発電の効率が下がり、また、火星の重力圏を出るためには大きな推力が必要なため、電気推進では巨大な太陽電池を搭載しています。一方、この頃はまだフォボスへの着陸の検討が進んでおらず、今思うと、電気推進による大きな太陽電池を有した形態では、フォボスのようなある程度の重力を持った天体への着陸は困難で、電気推進を選ばない決定は正解だったと思います。
ii. 第二世代(2016年~ 2017年)
推進系として往路・復路ともに化学推進系を使用することを決めた後の形態です。この時期は化学推進系を選択したため搭載推進薬質量が大きくなり、探査機の軽量化に重点を置いていたため、モジュール構成としては打上げ質量を最小とできる3モジュール形態を選択しています。また、太陽電池パドルは新規開発の薄膜型を想定しており、軽量化のために湾曲したパネルとしています。脚は太陽電池と平行に配置し、着陸時に探査機が傾いた時に太陽電池がなるべく地面に接触しないように工夫していますが、脚自体の構造の検討が進んでいなかったため、実現性が十分とは言えません。
iii. 第三世代(2018年)
フォボスへの着陸の検討を本格化した形態で、着陸ダイナミクスの解析のベースにも使われました。緩衝装置の検討も進み、必要なストロークや、主構造との連結部分の設計も本格化しました。構造的にはバイクの前輪の緩衝装置と同じテレスコピック式で、アポロの月着陸船に近い形態です。太陽電池は第二世代と同じままですが、脚が長くなった分、地面との接触角の余裕が増えています。また地上高も確保しており、フォボス表面でのサンプリング要求に合致した設計となっています。この時期はシステムの簡素化の可能性も模索しており、探査と復路モジュールを一体化した2 モジュール構成となっており、現コンフィギュレーションとは異なります。
iv. 第四世代(2019年~)
更に検討が進むにつれて打上げ質量が厳しくなることが判明したため、複雑だが、より軽量な3モジュールに回帰しました。緩衝装置はヒンジで接続された主脚と副脚から構成されており、主構造のサイズを抑えながら、脚の広がりを極力大きくして転倒を防いでいます。脚の構造の検討も進み、フォボス着陸時のショックを受け止められるようになりました。また、太陽電池についても、第三世代以前の軽量パドルでは着陸時に曲がりやすく、地面と接触する可能性が判明したため、若干重くなりますが、2段展開による正方形に近い形になっています。
現在はこの形態を基に、更に軽量化などのリファインを図っています。
最後に
MMX探査機システム設計を行う私の職責は、英語ではLead Engineerと呼ばれており、日本語では設計主席とか設計主務者と訳されています。皆さんはジブリのアニメの「風立ちぬ」を見たことはありますか?実はあの主人公は、私と同じ設計主務者なのです。プロジェクトで一番偉いのはプロジェクトマネージャですが、プロジェクトという大きな物語の中での主人公は、設計主務者ではないか、と自分では思っています。
【 ISASニュース 2020年12月号(No.477) 掲載】