
近日参上「はやぶさ2」
〜リュウグウの乙姫殿、お宝をいただきます。〜
●距離計測を拒むリュウグウ
「はやぶさ2」は、最終的に2018年6月27日に小惑星から20 kmの地点で、相対速度を0として小惑星到着となったわけですが、その直前のアプローチフェーズ運用においてはLIDAR(LIght Detection And Ranging)と呼ばれるレーザ距離計を用いて、到着の5日前からリュウグウとの相対距離を計測しようと、毎日試みていました。
LIDARは小惑星との測距を行うセンサで、科学観測機器であると共に、タッチダウンなどの小惑星近傍運用における航法誘導制御に用いる重要な航法機器です。軌道決定や画像航法によってリュウグウとの距離は推定可能とはいえ、実際に1m以下の精度で相対距離が計測できることは航法において大きな意味を持ちます。我々は測距の成功を期待しながら毎日の運用でLIDARの起動プロセスを繰り返しました。到着前にそれなりの余裕をもって測距ができるだろうと期待していましたが、実は全く測距ができず、何とか成功したのは到着を宣言した日の前日でした。
その後センサ設定値の調整を実施して、最終的には測距成功率がほぼ100%になったのですが、測距に苦労した原因は、リュウグウが黒く、表面反射率が低いために、想像以上にLIDARからリュウグウに照射したレーザ光の反射強度が低く、当初設定していたLIDARのノイズ閾値などの設定値を再検討する必要に迫られたためでした。測距が困難な要因は表面反射率以外に、表面の凸凹の程度、リュウグウがコマのような形をしていることに起因するレーザが当たる斜面の傾きなどが関係していることが後の解析で明らかになってきています。
到着以降に続く、高度6.5 kmまで降下して高度維持をする中高度観測運用、高度851mまで自由落下で降下して重力を計測する重力計測降下運用においてもLIDAR測距はリュウグウの「気まぐれ」に対し更なる工夫を必要としましたが、最終的にタッチダウンのための測距の目途を立てることができています。このセンサを活用して信頼性の高いタッチダウンを目指したいと思います。
「はやぶさ2」AOCS担当 照井 冬人(てるい ふゆと)
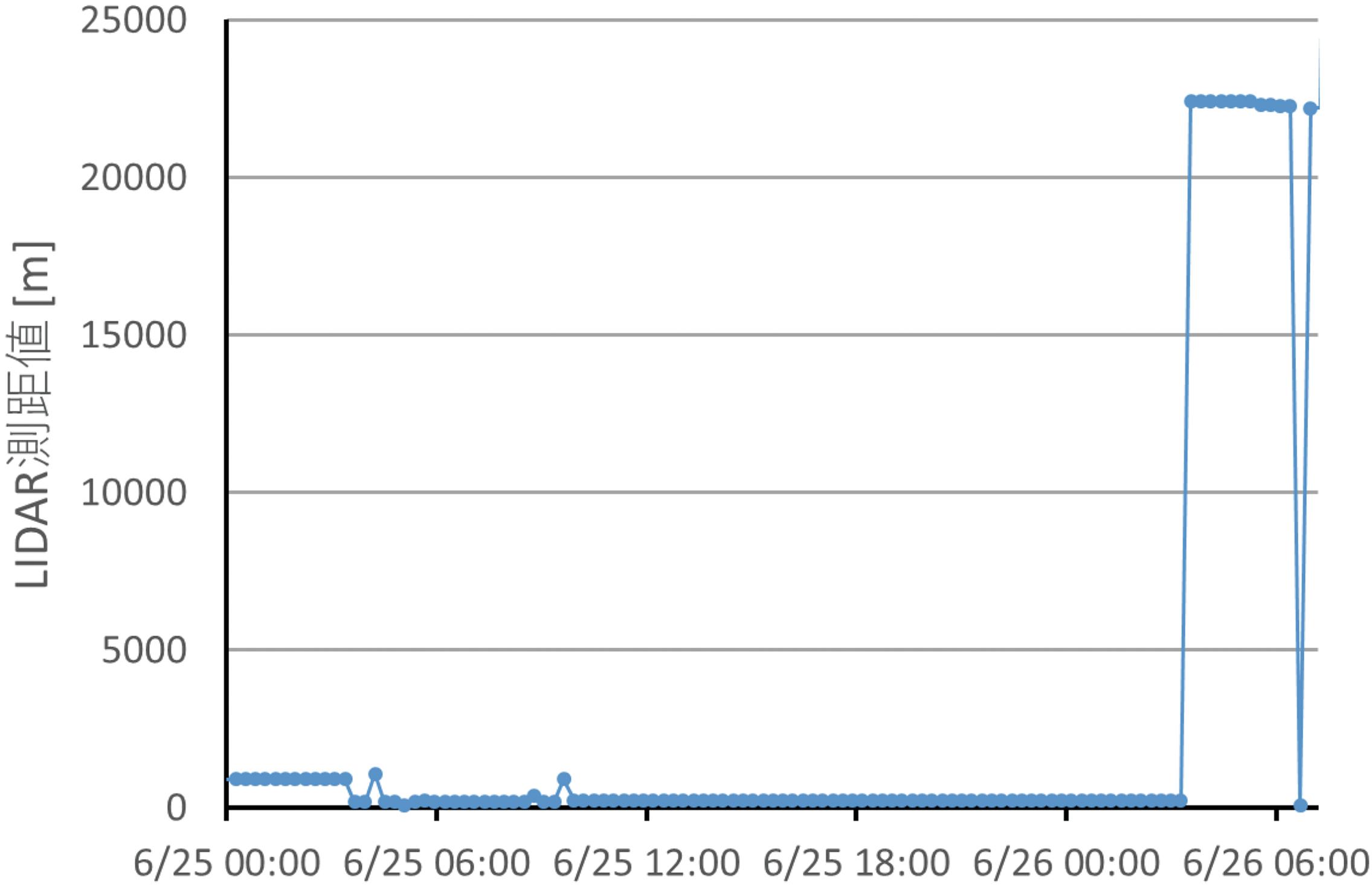
小惑星との距離約22kmで初めてLIDAR測距が成功した瞬間(縦軸:測距値)。最初は測距のための設定値を調整していて、なかなか成功せず正しくない値が得られている。測距値が22kmとなったところが測距に成功した瞬間である。距離計測成功後に距離の値がゼロになっているところがあるが、これは計測ができなかったことを示している。このような距離計測ができないということがほぼなくなるように、LIDARの設定値を調整した。
●小惑星リュウグウの形状モデル
「はやぶさ2」の形状モデルチームでは、ONC-T(望遠の光学航法カメラ)で撮影した画像などをもとに、リュウグウの三次元形状を計測して、形状モデルを作成します。リュウグウの形状は、小惑星の成因や進化を考える上で基本的な情報であると共に、探査機の運用のためにも使われる、理学的にも工学的にも非常に重要な情報です。
われわれ形状モデルチームでは、2つの異なった方法で形状モデルを作成することにしています。1つ目の方法は、Structure-from-Motion(SfM)と呼ばれるステレオ視の手法の一種です。最近よく見かける、ドローンからの空撮の映像から地形や建物の形を復元するのにも同種の手法が用いられています。もう1つの方法は、Stereophotoclinometry(SPC)と呼ばれるもので、ステレオ視に加えて地形の凹凸と照明条件の兼ね合わせで生じる陰影情報も利用します。「はやぶさ」ミッションでの小惑星イトカワの形状推定を始め、多数の探査ミッションで使用された実績があります。
本稿執筆時点では、リュウグウへの到着後の最初の観測データ(主に高度20 kmから撮影された画像)を用いた形状の解析が終了しています。幸いにして2つの方法でほぼ同じ結果が得られており、正しくリュウグウの形状を復元できていることが確認できました。ポリゴンモデルの形で得られたリュウグウの三次元形状モデルを見ると、そろばんの珠のようなリュウグウの全体形状や、その表面にあるクレーターのような窪地、岩塊が再現できていることがわかります。今後、より高解像度の画像も取り込んで、詳細な形状モデルを作成していきます。
会津大学「はやぶさ2」形状モデルチーム 平田 成(ひらた なる)
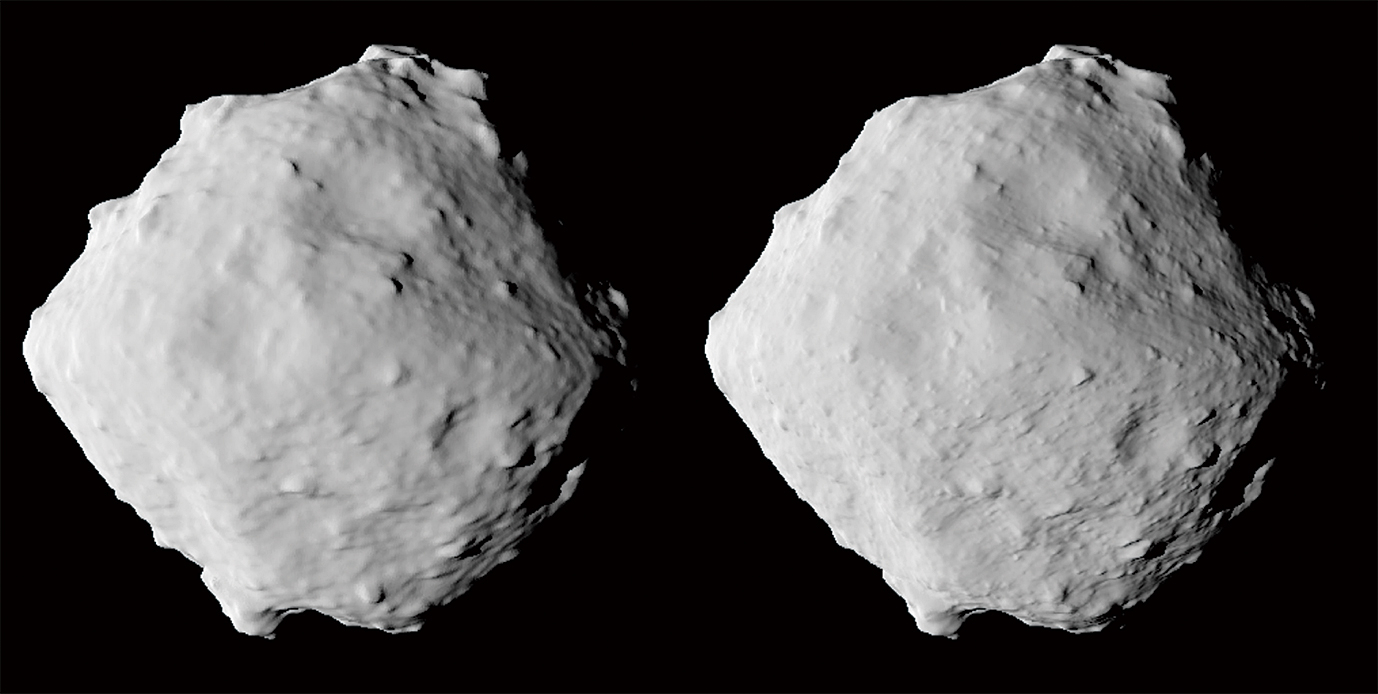
リュウグウの形状モデル。左がSfM、右がSPCで作成したもの。
(©会津大学、神戸大学、JAXA)
【 ISASニュース 2018年9月号(No.450) 掲載】