
近日参上「はやぶさ2」
〜リュウグウの乙姫殿、お宝をいただきます。〜
●「はやぶさ2」接近時のリュウグウの位置測定
私たちの目的地「龍宮城」は煌々とした灯りに包まれていました。今年2月にはじまった理工共同作業も最終段階にはいり、6月5日以降連日のように光学航法による運用が実施されました。地球から遠く離れた直径1kmにも満たないリュウグウに探査機を誘導するために、光学航法は必要不可欠です。私たちに求められた役割は、運用終了から2時間半以内に、できるだけ正確に探査機から見たリュウグウの位置を測定することです。遅延なく翌日の運用計画に反映するため、地上観測、航法、誘導、運用の各チームが親密に連携することが求められます。
探査機から降りてくるデータは、連続して取得された長時間露出画像(露出時間178秒)と短時間露出画像(0.087秒)の2枚1組で構成されています。まず、長時間露出画像を用いて背景の星を検出し、各画像から天球座標系に変換するための座標変換係数を決定します。次に、短時間露出画像を用いてリュウグウの中心位置を測定し、先に調べた座標変換係数を用いて天球座標に変換します。このようなデータが毎日約10組送られてきました。観測画像には、天体からの光や宇宙線だけでなく、観測機器特有の擬似信号や、時には予測できない干渉パターンや欠損データなどが含まれており、担当者がその都度画像を見ながら解析を行いました。図はリュウグウ到着前日の6月26日に得られた、最後の光学航法用画像です。この時リュウグウの見かけの等級は-15等、実に満月の8倍の明るさに達していました。
【地上観測チーム】
ソウル大学 石黒 正晃(いしぐろ まさてる)
京都大学 黒田 大介(くろだ だいすけ)
日本スペースガード協会 浦川 聖太郎(うらかわ せいたろう)
日本スペースガード協会 奥村 真一郎(おくむら しんいちろう)
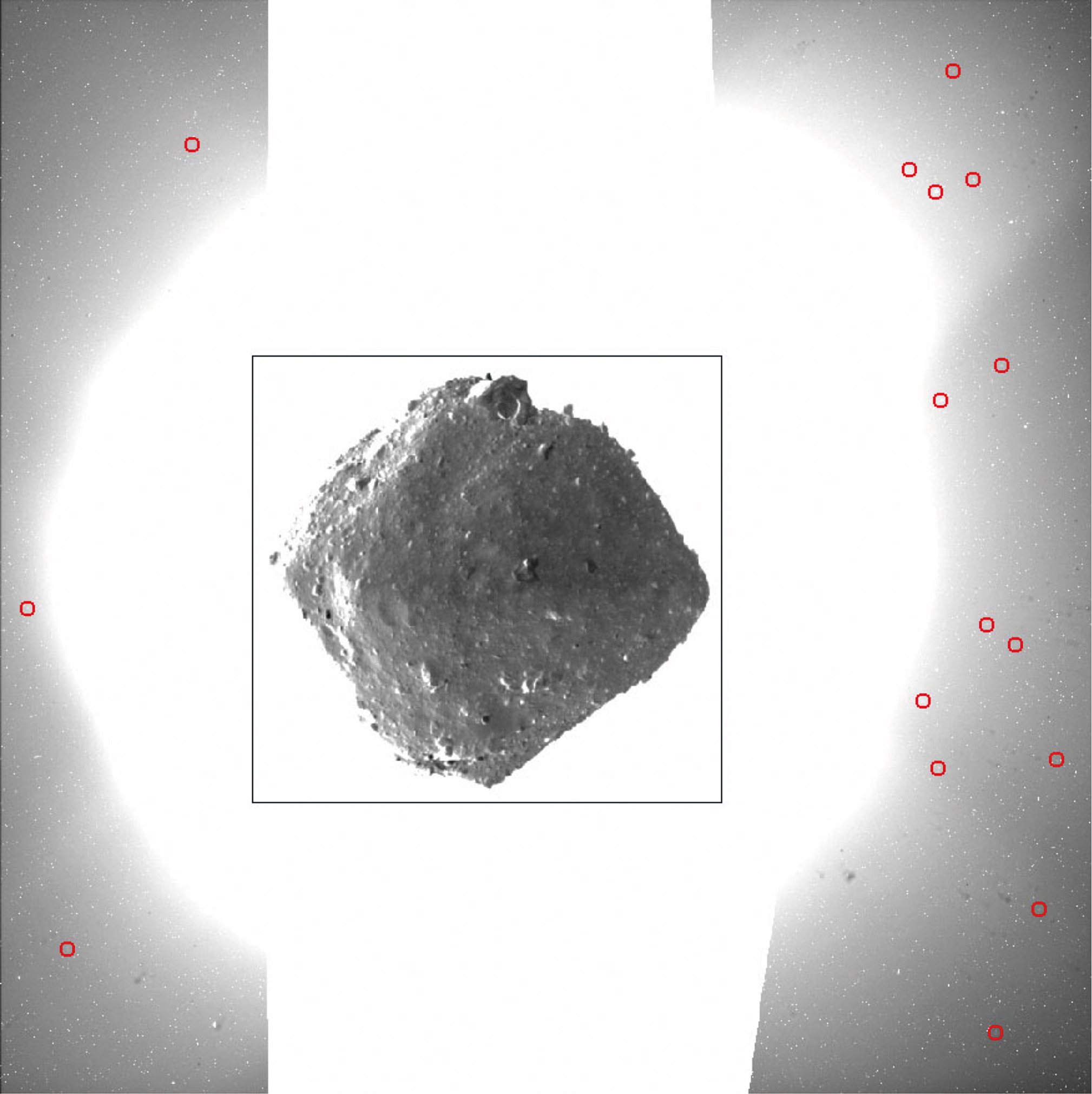
光学航法望遠カメラONC-Tによる長時間および短時間露出データを用いて作成した合成画像。リュウグウまでの距離は約22km。長時間露出画像では、赤い丸で示した場所に星を検出しましたが、リュウグウが非常に明るく、画像の大半は信号が飽和して真っ白に見えています。この合成画像では、リュウグウの位置を示すため短時間露出画像(輝度を反転)を重ね合わせています(中央部四角で囲った領域)。
画像クレジット:【地上観測チーム】ソウル大学/京都大学/日本スペースガード協会【ONCチーム】JAXA/東京大学/高知大学/立教大学/名古屋大学/千葉工業大学/明治大学/会津大学/産業技術総合研究所
●リュウグウ最終接近フェーズの軌道決定
地上の大型アンテナを利用する電波計測により「はやぶさ2」の軌道を推定する作業が軌道決定です。リュウグウへの最終接近フェーズ前の巡航期間中は1週間に一度の頻度で軌道決定が行われました。その結果は「軌道計画」に反映され、化学エンジン(RCS)やイオンエンジンの噴射計画を調整することにより、常に正しくリュウグウに向かうよう軌道が修正されました。
到着目標となるリュウグウの軌道は、過去の地球からの光学観測結果に基づいてNASAが計算した軌道ですが、遠く離れた地球からの観測に基づいているため誤差が大きく、リュウグウの最終接近フェーズでは頼ることはできません。そこで「はやぶさ2」搭載の光学航法カメラでリュウグウの位置を計測したデータと、地上からの「はやぶさ2」の電波観測データとを組みあわせる「光学電波複合航法」により、リュウグウと「はやぶさ2」の軌道を同時に決定・更新しながらリュウグウへの最終接近を行いました。最初のリュウグウ軌道の更新は2018年2月26日に撮られたリュウグウ初撮像データに基づき4月19日に行われ、その後も光学観測データが増える度に逐次的に軌道を更新し到着に至りました(到着直前には1~2日の頻度で推定・更新しました)。
事後の検証により、軌道更新の度に正しいリュウグウ軌道に近づいていた事に加え、軌道更新時に付加情報として示した軌道不定性(1σ誤差楕円)の見通しも概ね正しい大きさを示していた事が確認できました。このようにリュウグウの軌道を正確に推定できたのは、「はやぶさ2」で新たに採用された軌道決定の電波計測手法DDOR(Delta Differential One-way Range)により2天文単位先の「はやぶさ2」の位置を数キロメートル以下の誤差で計測できるようになった事が大きく寄与しています。DDOR計測はリュウグウ滞在中にも定期的に行われ、リュウグウ表面からの熱輻射が軌道変化に与える影響などを調べる予定になっています。
「はやぶさ2」軌道決定担当 竹内 央(たけうち ひろし)
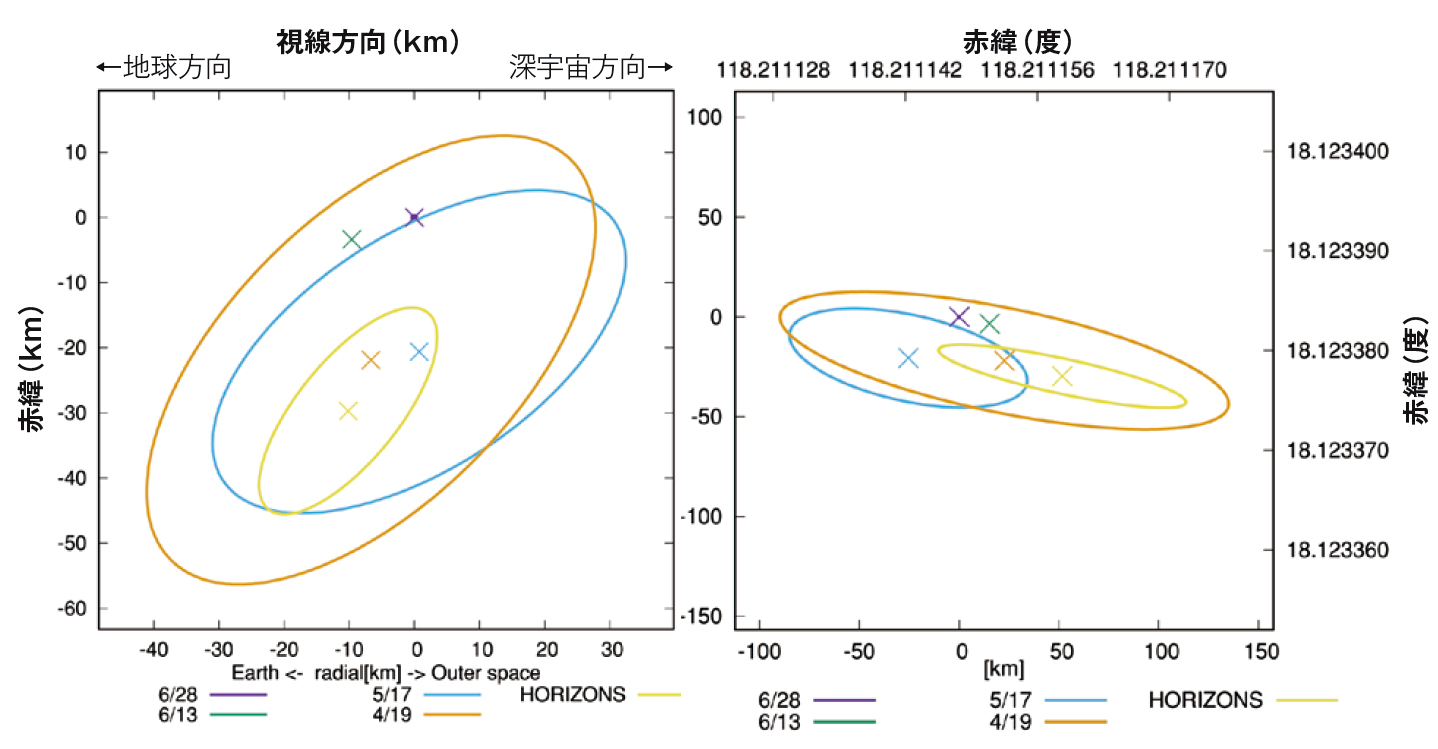
4/19、5/17、6/13、6/28に更新したリュウグウ軌道、及び、NASA(HORIZONS)の軌道における7/1時点のリュウグウ位置。6/13分は富士通の解、それ以外の日はJAXAの解を公式軌道解として提供した。楕円は各々の軌道の位置不定性の推定値(1σ)を表す。6/28の誤差は×印より小さくほとんど見えない。6/13は解析手法が異なるため誤差は示していない。左の図の視線方向成分は地球からの距離284,636,329[km]の地点をゼロ点とした。
【 ISASニュース 2018年8月号(No.449) 掲載】