
このたび、国立研究開発法人宇宙航空研究開発機構(JAXA)が実施する「産学官による輸送・超小型衛星ミッション拡充プログラム(JAXA-SMASH)」において選定され、フィージビリティ・スタディを実施してきた「超小型ソーラーセイルよる姿勢・軌道統合制御実証」(Powered Innovative Earth-orbiter with Reorientable Inclined Sail(PIERIS)、以下「PIERISプロジェクト」と呼ぶ。)が衛星開発フェーズに移行することが決定いたしました。

図1: 超小型ソーラーセイルPIERISのイメージ
(Photo by 東京科学大学、JAXA)
本記事では、PIERISプロジェクトの研究内容についてご紹介いたします。
JAXA-SMASHによる選定の経緯
ソーラーセイルは、大きく広げた帆(セイル)に作用する微小な太陽輻射圧を積極的に利用して推進する宇宙機であり、推進剤を消費せずに軌道変更を行うことができます。したがって、推進剤の搭載量が少ない超小型衛星の推進性能を大きく向上させられ、将来的には月近傍や惑星間といった深宇宙探査での活躍が期待されます。
今回の超小型ソーラーセイル計画は2023年12月にJAXA-SMASH 超小型衛星ミッション公募#2のテーマとしてフィージビリティ・スタディ・フェーズに採択され、その後のフェーズアップ審査を通過して衛星開発フェーズへと移行することが正式に決定されました。衛星開発フェーズでは、2027年3月の開発完了を目指して40kg以下程度の超小型衛星の設計・開発・試験を行っていきます。開発に向けて、宇宙科学研究所の宮崎康行 宇宙飛翔工学研究系教授、森治 学際科学研究系教授が、東京科学大学の中条俊大 工学院機械系 准教授、渡邉奎 総合研究院量子航法研究センター 特任助教、谷津陽一 理学院物理学系准教授、中西洋喜 工学院機械系 准教授、戸村崇 工学院 電気電子系 助教のグループ、株式会社cosmobloom (福永桃子代表取締役)と共同研究体制を構築し、ミッションおよび衛星システム(姿勢・軌道統合制御システムを含む)は東京科学大学が、セイル展開構造系は宇宙科学研究所と株式会社cosmobloomが主に担当して開発を進めていきます。
PIERISプロジェクトが目指す工学
一般的な宇宙機は、軌道変更(制御)する際には推進剤を消費してガスを噴射する必要があるため、どれだけの時間、どれだけの加速量だけ軌道変更できるかは推進機の性能と推進剤の搭載量によって決まります。一方、ソーラーセイルは推進剤を消費しないという利点があり、これをうまく利用すれば、原理的にはいつまでも軌道制御し続けられることになり、さまざまな宇宙ミッションに有効であるといえます。実際、ソーラーセイルは、太陽方向に対する姿勢を変化させるだけで、太陽から遠ざかる方向だけでなく近づく方向にも軌道を変更することができます。ただし、太陽輻射圧(※1)は微小であるため、必要な加速量を確保するためには、ソーラーセイルはできるだけ軽量にする必要があります。
このようなソーラーセイルのアイデアは古くからあるものの、世界で初めてソーラーセイルによる惑星間航行を成功させたのは、JAXAが2010年に金星探査機「あかつき」との相乗りで打ち上げた小型ソーラー電力セイル実証機「IKAROS(イカロス)」であり、その際、IKAROSは14m四方で厚さ7.5ミクロン、質量が約15kgという大型で軽量な薄膜を展開しています。一方、海外においては、まだ惑星間航行にまでは至っておらず、地球周回衛星によるセイル膜の展開ミッションや太陽輻射圧を利用した軌道変更ミッションを行っている段階です。
このIKAROSの成功により、我が国はソーラーセイルによる航行技術と大型薄膜の展開技術を獲得したわけですが、今後、ソーラーセイルによる本格的な深宇宙探査を実現していくにあたって、必ず解決すべき重要課題が1つあります。それは、軌道上でのセイル膜の変形が原因で太陽輻射圧による外乱トルク(※2)が生じ、不要な回転運動が生じてしまう問題です。この回転運動をキャンセルするためには推進剤を消費する必要があり、ソーラーセイルの利点が失われてしまいます。この問題はIKAROSでも確認されています。
この問題を解決するためには、軌道上での大型膜やそれを支持する軽量構造の変形をできるだけ小さくし、高い形状精度を確保する技術、ならびに、それでも生じてしまう外乱トルクが姿勢に与える影響を、推進剤を使わずに制御し、同時に軌道をも制御する姿勢制御技術が必要となります。しかし、セイル膜構造のような極めて軽量な構造については、製造時の寸法誤差や折り畳みの際に生じる折り癖の影響等により形状誤差が生じやすく、高精度化は困難と言われてきました。また、上記のような、推進剤フリーで姿勢と軌道を同時に制御する技術もアイデアの段階にとどまっていました。
そこで、JAXA-SMASHのフィージビリティ・スタディにおいて、宮崎教授らは、セイル膜を平面ではなくピラミッド型にすることで、現実的な製造誤差の範囲内で外乱トルクを小さく抑えることができることを見出すとともに、ピラミッド型セイルを実現するセイル展開構造、すなわち、軽量で展開性に優れた展開機構やセイル膜の収納・展開法等の設計解を示しました。そして、cosmobloom社は協力企業とともにそのようなセイル展開構造の精度の高い製造法を明らかにしました。
また、中条准教授らは、衛星本体とセイル展開構造との間にジンバルを搭載し、セイル展開構造全体を衛星本体に対して相対回転させることで(図2)、理論上は(セイル膜の変形量がある範囲内であれば)完全に推進剤フリーな姿勢・軌道統合制御が可能になることを明らかにしました。なお、ジンバル機構を用いた制御というアイデアは、旧東京工業大学で故・松永三郎教授らによって開発された、可変形状姿勢制御実証衛星ひばり(2021年打上げ)に着想を得ているとのことです。
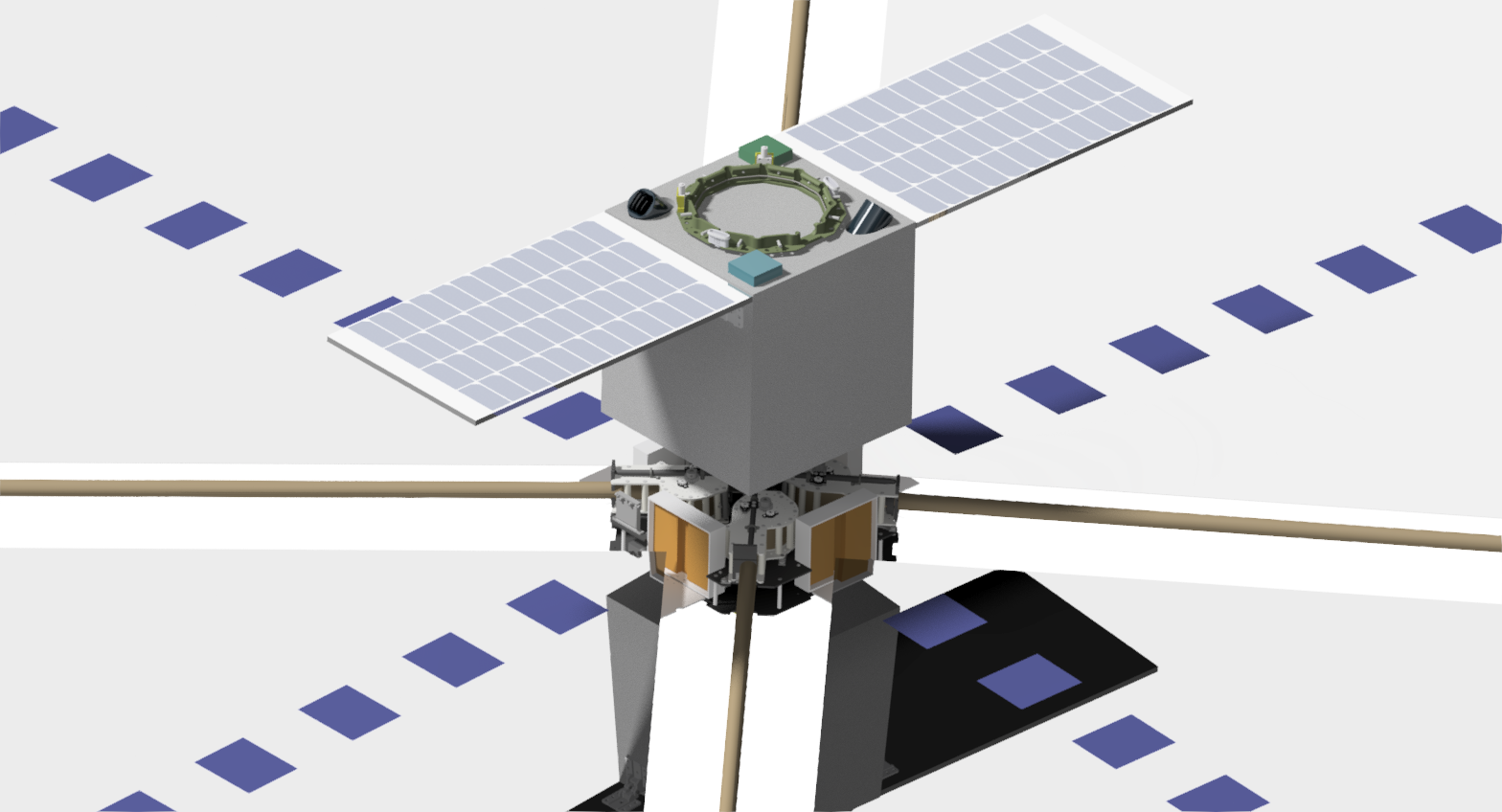
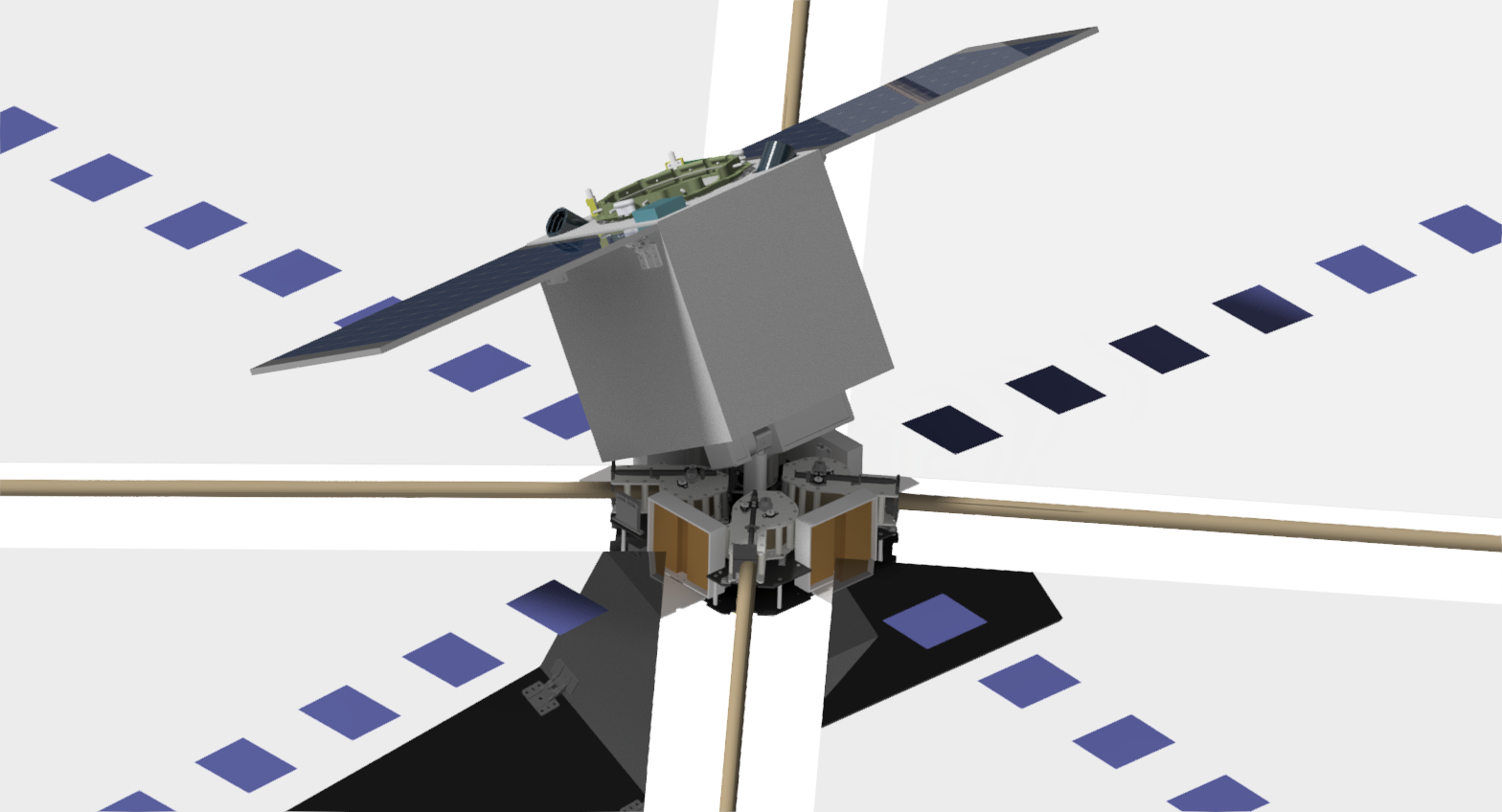
図2: ジンバルのイメージ (Photo by 東京科学大学、JAXA)
そこでこのような新しい技術を宇宙で実証しようというのがPIERISプロジェクトです。セイル自体は5m四方と、IKAROSに比べると小さいですが、このサイズでも技術実証が可能であることはフィージビリティ・スタディにより確認しています。
また、このプロジェクトでは、それらの技術実証だけでなく、将来の深宇宙探査に向けた発展的な技術実証として、セイル上に搭載する多数の薄膜太陽電池による発電実験や、その電力を利用した推進機による(ソーラーセイルと組み合わせたハイブリッド推進による)軌道制御実験も実施予定です。
PIERISプロジェクトの先にあるもの
これまで、本研究チームはフィージビリティ・スタディと並行して、多くの大学やJAXAの研究者とともに超小型ソーラーセイルによる深宇宙探査に関するリサーチグループの活動を続けてきており、今後も活動を発展させていきたいと考えています。そして、PIERISプロジェクトにより姿勢・軌道統合制御やその他の発展的な技術を実証できれば、深宇宙探査の実現が可能になってくると考えています。
また、PIERISプロジェクトで実現する高精度なセイル展開構造技術は、例えば、地球周回軌道におけるスペースデブリ問題の解決に向けた運用終了後の衛星のデオービット装置、あるいは、通信用の大型膜面アンテナへの適用が可能であり、ソーラーセイルだけでなく、これらの装置の事業化も計画しています。
※1 太陽から飛んでくる光子(Photon)が物体の表面に衝突して発生する圧力のことで、面積が大きいほど、力が大きくなります。
※2 想定していない力によるモーメント(物体を回転させようとする作用)のこと。