
地上局(アンテナ)を総動員して
VOI-R1を確実に実行するためには、探査機が飛行している軌道を精確に知る必要があります。このため、NASAの協力を要請し、日本局(臼田φ64mおよび内之浦φ34m)に加えて、深宇宙追跡局(アメリカ、スペイン、オーストラリアにあるDSN局)の追跡データを用いて、高精度な軌道決定を行いました。
軌道決定は位置及び速度のいわゆる軌道6要素を決定するもので、地上局と探査機の視線方向に対するレンジ(距離)とドップラ効果による周波数変化(距離変化率)の計測値を用います。地上局から見て「あかつき」は非常に遠くを飛行しており、距離の変化量はその距離の大きさに比べてわずかです。そういうときは、距離変化率の動きが軌道決定の精度向上のために重要となります。惑星間巡航中では、図6に示すように距離変化率には、探査機の動きに加えて地球の自転による正弦波状の動きが重なって現れます。このメカニズムはよく分かっているので精密にモデル化できて、それを計測結果と突き合わせることで精密な軌道推定、すなわち軌道決定が可能になります。更に「あかつき」では、軌道決定の精度向上に必須な観測技術であるDDOR(Delta Differential One-Way Ranging)という、地球規模で離れた複数の地上局で電波星や「あかつき」からの電波を同時に受信する手法を用いることにより、距離や距離変化率とは違って局--探査機の視線方向に対して垂直な方向に感度を持つ技術も使われ始めました。これにより、従来の軌道決定での位置精度約150kmが約30km程度まで向上しました。
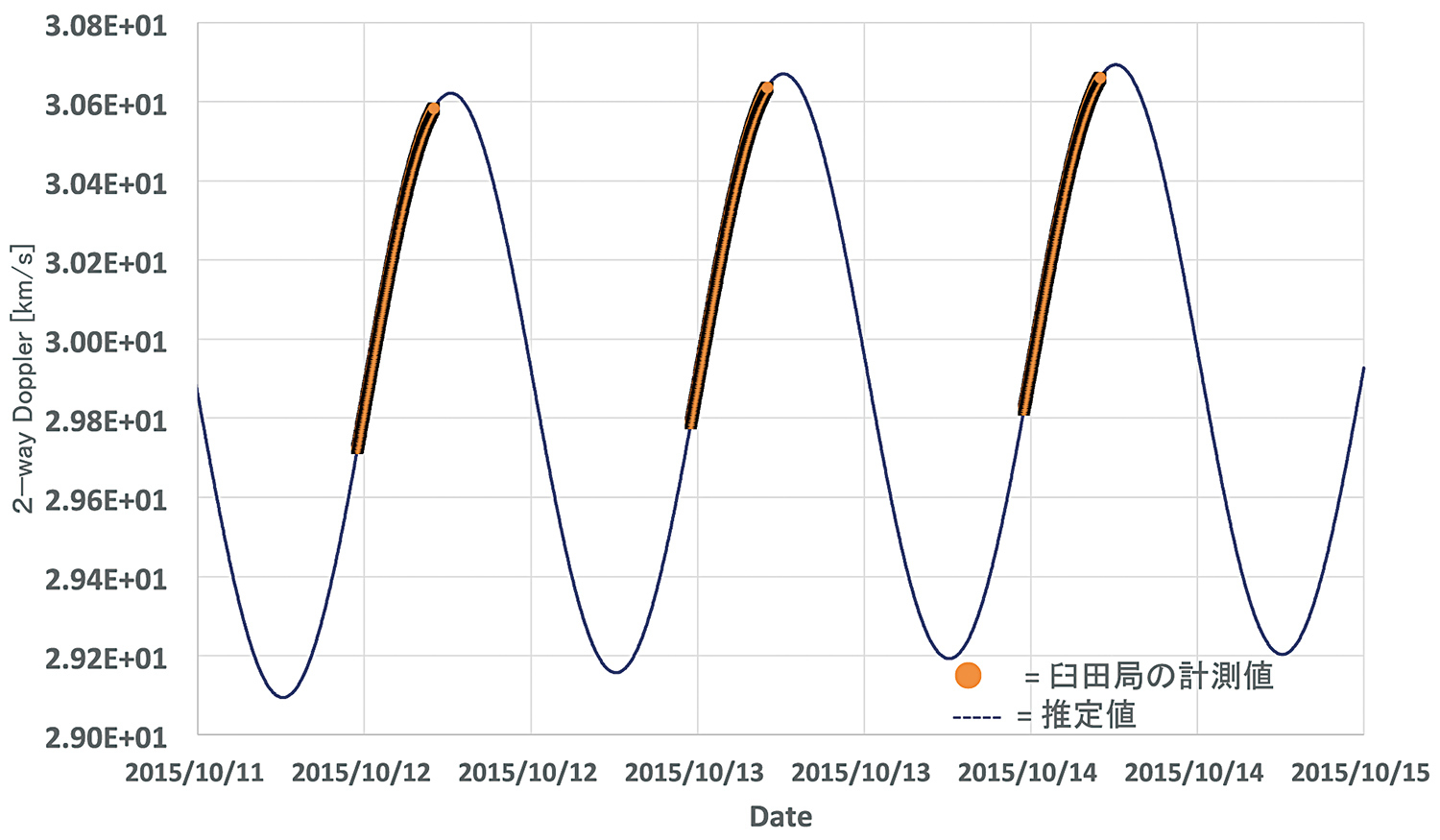
図6 距離変化率(2-way ドップラ)の観測値(臼田局)
投入後の金星周回中の軌道決定においては、距離変化率の計測は更に重要です。探査機に及ぼす金星重力の影響はとても大きく、惑星間巡航中と比べても数十〜数百倍の精度向上が実現可能です。「あかつき」での成果をご紹介しましょう。1周回/約10日の金星周回軌道に対して、約1カ月(3/26〜4/27/2016)の地上局--探査機間双方向通信による距離変化率データを用いることで、近金点高度3,440[km]、速度7.03[km]に対して近金点近傍での非常に感度の高いところでも、位置決定誤差約105[m](1σ)、速度決定誤差約22[cm/s](1σ)を達成できました。ただし、周回中では科学観測を目的とした姿勢変更が頻繁に行われるため姿勢外乱(アンローディング)が計測期間中に数回〜十数回実施されます。距離変化率データにはその際の姿勢外乱誤差などの影響が混じるため、やはりこの擾乱をモデル化して重み付き最小自乗法を用いて軌道と共に影響を推定しています。
準リアルタイムにVOI-R1を監視
探査機から発信される電波の周波数を測定することで、探査機の速度の視線方向成分が計算できます。電波が地上に届くまでの電波遅延(「あかつき」VOI-R1時で約8.5分)があるため、それだけ過去の状態にはなりますが、最も早い情報が準リアルタイムで地上に届きます。その周波数変化(ドップラデータ)の観測値(Observed Data)と事前の予測軌道による計算値(Computed Data)との差O-C(オー マイナス シー)は、探査機の速度が変化した量、つまり軌道制御量(ΔV)に相当します。この周波数変化を視覚的に表示したものが図7のΔVモニタです。ところが、金星最接近時には探査機速度の方向が大きく変化し、それに伴い周波数も大きく変化するため、周波数変化が軌道制御(ΔV)によるものなのか速度が金星近傍で大きく回り込んだことによるものなのか判別が難しくなります。また、基準となる予測軌道と実軌道との差が大きいとやはり正確な制御量の判断ができません。このため、軌道制御開始の直前の最新軌道決定値を用いて開始直後の初期残差をなるべく小さくするとともに、軌道計画において算出された制御量を15%から100%(図7の各色の線)の範囲で場合分けした軌道を複数用意し、それぞれの軌道に対してどのようなO-Cに見えるかをあらかじめ表示しておきました。実際の周波数残差と100% で軌道制御が実施された場合の参照軌道を比較することで、現在の値が想定の100%に対してどの程度の効率になっているかが評価できますし、制御計画値全体を100%としたときに現在値が全体に対して何%達成したかが準リアルタイムに評価できます。
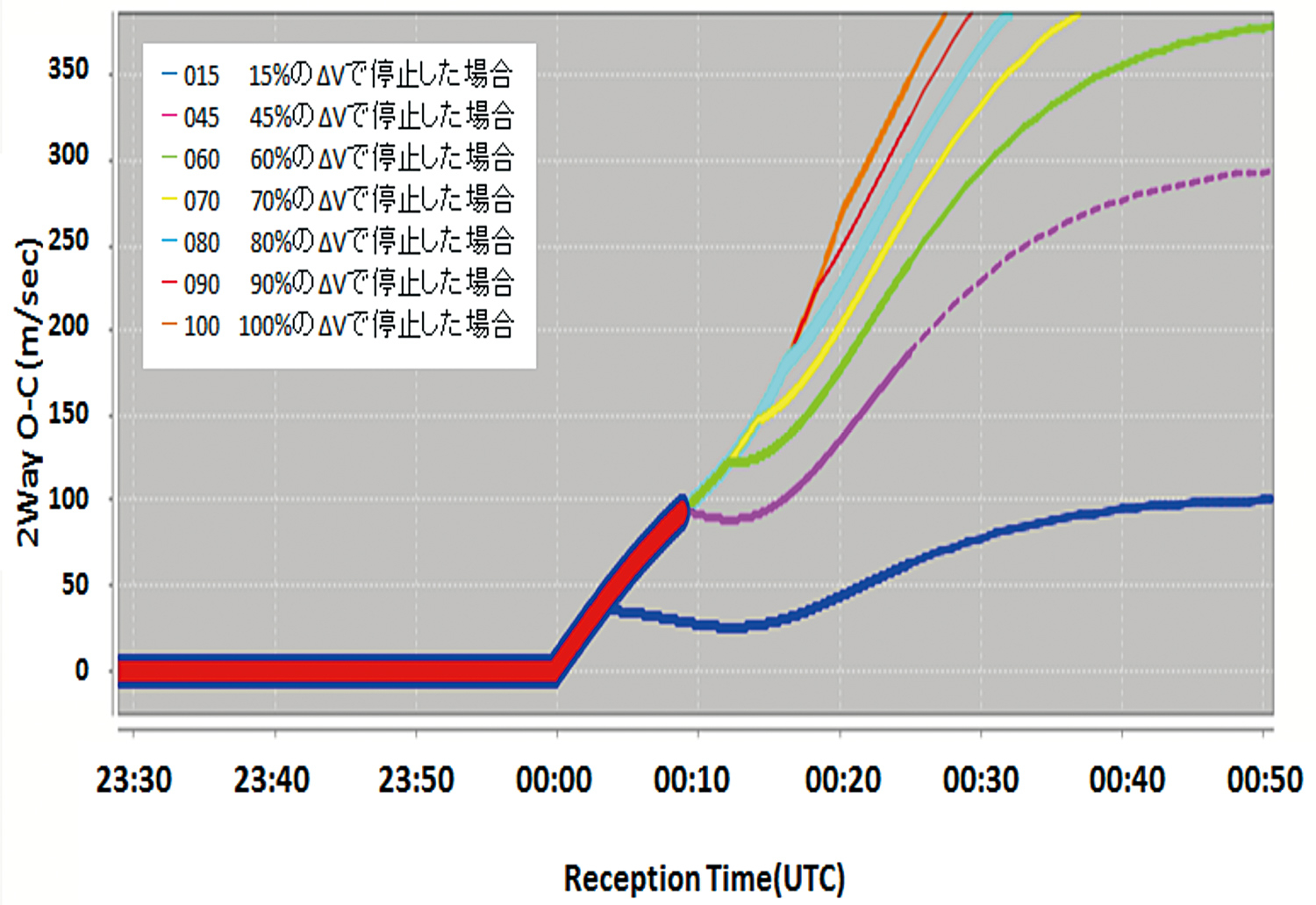
図7 金星周回軌道投入直前、直後の周波数変化(ΔVモニタの画面)
これらの機能を用い、軌道制御当日のドップラデータをモニタしました。軌道制御開始前の実軌道と計画軌道との初期残差は40[mm/sec]程度で十分に小さく、地上時刻で12月6日23:59:48(UTC)に軌道制御の開始が確認され、RCS噴射中は102%から103%程度の効率で推移しました。最終的には地上時刻で12月7日00:20:16(UTC)に102.7%の効率でRCS噴射が正常に停止したことが、準リアルタイムで評価でき、誘導航法運用の支援機能として役目を果たしました。