
微弱な電波を確実に捕捉
探査機や衛星が持つ通信機能には、探査機までの視線距離や相対速度を計測する役割が含まれます。地上と探査機を結ぶ電波にしか託せない役目であるため、探査機との電波の送受信の担い役である通信装置(ISASニュース2010年9月号)が負うべき大事な役割の1つなのです。言うまでもなく、この距離と速度を測って知ることは、軌道投入の成否の判断に決定的な役割を果たします。
VOI-1では、投入制御の間、探査機は地球から見て金星の影に隠れてしまって電波が届かない位置関係にあったため、直接にその成否を観測することができませんでした。そのため、失敗かもしれないと分かってから、電波を用いて探査機位置を再び特定するのに時間がかかってしまいました。再度の軌道投入ではこのようなことにならないよう、軌道制御の期間が地球から見て可視になるような軌道が選ばれました。その結果、制御期間中、通信能力として回線を連続的に維持して途切れさせないようにする、つまり、探査機の軌道情報を、電波を通じて時々刻々、漏らさず地上で獲得できることが、再挑戦へ向けての至上命題の1つとなりました。
電波を通じて軌道投入の瞬間を確実に目撃するためには、以下の課題があります。探査機と地球との距離が遠く、それだけで非常に微弱な信号受信となるのですが、探査機は軌道投入に最適な姿勢を取っていて、指向性の強いアンテナを地球へ向けることができないので、一層微弱な信号受信に立ち向かう必要があるのです。また、軌道投入は大きな速度変化を伴うものであり、結果としてドップラ効果を通じて大きな周波数変動を被ります。図5の実線が今回の軌道投入で経験する周波数変動です。信号受信では、探査機からの信号強度の問題に加えて、この周波数軸上のダイナミックな変動に持ちこたえる必要があるのです。信号強度の弱さに対処しようとすれば、周波数変動への追従性が悪くなるというように、この問題は連動しています。
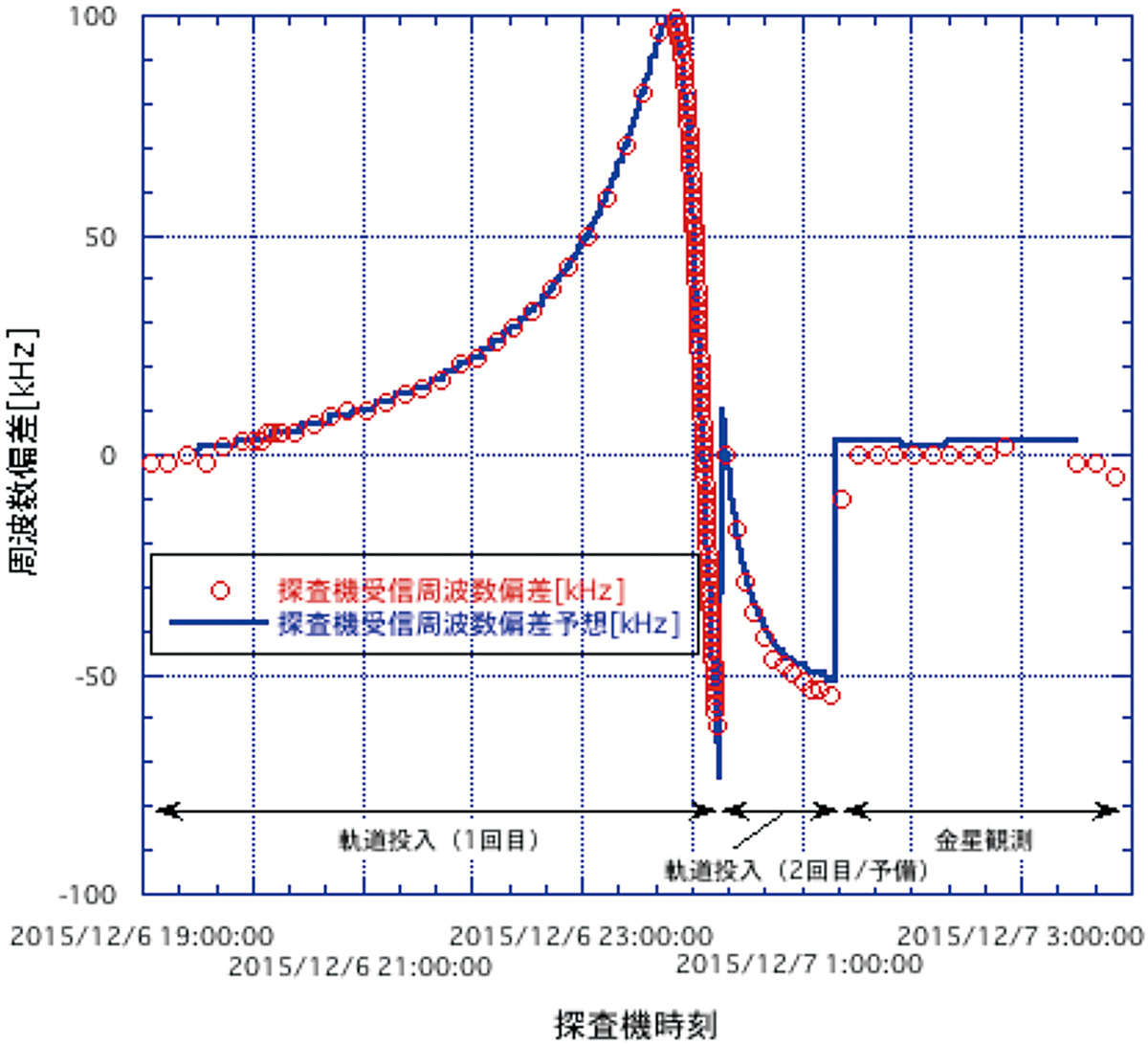
図5 軌道投入における「あかつき」追跡の予想と結果
大きな周波数変動にも確実に追従
VOI-R1においては、まず信号強度の問題について割り切った対応を決めました。搭載の通信装置の能力は、設計で決まっています。地上側も、臼田宇宙空間観測所の64mアンテナを擁しており、でき得る限りの条件が揃っています。そこで、軌道投入の間だけは探査機からの送信パワーをデータ伝送に分配しないようにして(変調を切る、あるいは無変調にすると言います)、パワー全てを投入成否の判断に必要となる探査機の周波数変動の観測だけに注力するようにしました。探査機の時々刻々の状態の確認は軌道投入後に後回しとし、これ以上の信号強度の補強はできない状態を確保しました。
周波数変動の課題は、VOI-R1の運用シークエンスとより密接に関連します。事前の入念な試験を経て注意深く策定された計画でしたが、前例のないことでもあり、最初の減速が思わしくないか、計画通りに進まない場合に、探査機姿勢を変更して異なるスラスタの組合せで軌道投入を補正実行する対策が念のために用意されました。このため、地上局から送信した電波を搭載した通信装置で捕捉追尾する上では、軌道投入時の大きな周波数変動に追従するだけでなく、一旦、姿勢変更のために計画通りに捕捉を中断した後に、間、髪を容れず再度捕捉して予備の軌道投入動作に備えることが求められました。周波数変動の課題とは、これら一連の周波数変動と操作に対応することを意味します。解決のために、手順は複雑になりますが、初回の軌道投入と続く2回目の軌道投入との間で運用中心周波数を切り替える確実な手法で対応しました。これによって変化率範囲と変動範囲が緩和して、通信装置の持つ性能範囲に収めることが可能です。また、地上からの再捕捉動作を制限時間内(具体的な要求は、伝搬遅延に要する時間を除いて6分以内)に完了させるべく、搭載通信装置の持つ基準となる発振器周波数を正確に把握して捕捉受信周波数誤差を最小限度に抑えることで、再捕捉に要する時間を短縮させました。軌道投入に先立つ1カ月あまり、このために、毎日の運用の中で軌道からの予測と搭載通信装置で実測する2つの受信周波数のずれを比較することから、発振器周波数のずれを精確に予測する手段も確立しました。
図5に、軌道投入を通じて「あかつき」搭載の通信装置で実測した受信周波数のずれの変遷が「○」のマーカで表されています。軌道の予測から想定していた動きが実線です。見やすさのため、マーカは全計測点の10%だけ表示しています。予測と実測は一致しています。このように急激に周波数が変化するタイミングと大きさが物の見事に一致したのは、軌道投入が予定通り進行し、完璧であったからに他なりません。図5で1回目と2回目および2回目と金星観測の切り替わりの狭間を除いて実測点が欠損していないことから、軌道情報を計画通り漏れなく取得するという目標も達成できています。さらに、地上側の図5に対応する実測データを加えるならば、搭載と地上と、全体として軌道情報を完全に取得できたことが結論できます。これにより、軌道投入成功の素早い報告へとつながりました。