
姿勢の制約
「あかつき」は黄道面に近い軌道を周回しながら、金星大気の運動を多波長カメラで撮像し、高利得アンテナ(HGA)を使ってその画像データを地球に送信します。そのため、±Y軸方向に角運動量を持つ3軸姿勢制御を採用し、探査機本体をY軸回りに回転する制御を基本動作としています。姿勢決定には3軸光ファイバージャイロ(IRU)と恒星センサ(STT)を使用し、姿勢変更にはリアクションホイール(RW)または姿勢制御用スラスタ(RCS)を使用します。これらには使用上の制約があり、まず、±Y面に取付けられた放熱板の温度が高くなると機器が発した熱を効率的に逃がすことができなくなるため、太陽光を±Y面に仰角13°以上で入射させてはいけません。また、STTや多波長カメラに直接太陽光が入らないように、さらに、金星がSTTに迷光として入る場合にはSTT出力を信用しない(データを却下する)など、それらの制約を全て満足させつつ探査機本体をY軸回りに回転させ、金星観測(-X軸を金星に指向)と地球通信(+Z軸を地球に指向)を適切な頻度で切り替えます。軌道制御中もこの制約は変わりません。軌道制御用メインエンジン(OME)を使った軌道制御(ΔV)では、姿勢制約を満足させつつ-Z軸をΔV方向と反対方向に一致させます。比較的小さなΔVはRCSを利用しますが、やはり、姿勢制約を守りつつ、+Z軸または-Z軸をΔVと反対方向に向けて使用します。
金星を周回する難しさ
「あかつき」を何としても金星周回衛星とするべく、2010年のVOI-1失敗後からの軌道再設計で最も大変だったことは太陽重力のイタズラでした。VOI-1時にメインエンジン(OME)が破損したので、以降の軌道制御は全てRCSを用いて実施せざるを得ません。RCSは4基を合計しても、OMEと比較すると2割弱の推力です。残った燃料から周回中の姿勢維持に必要な燃料を差し引いてVOI-R1を実施すると、遠金点高度(金星から最も遠ざかる点)は約37万kmになります(地球から月までの距離約38万kmとほぼ同じ)。図1に、金星を周回する軌道の5年間の変化を描きました。金星の斜め北方向から見た軌道の俯瞰図ですが、1年ごとに色を変えて描いています。金星の回りを「あかつき」が長楕円軌道を描いて金星の大気の回転方向と同じ向き(北から見て時計回り)に飛行しますが、ここで注目すべきは、「あかつき」の軌道が5年間で大きく変化することです。当初の計画の右図と比べると、その変化の度合いがよく分かります。これらは全て、太陽重力のイタズラ「潮汐力」によるものです。潮汐力というのは、潮の満ち引きの原因となる力で、地球では、月に押されたり引っ張られたりするために、海面が上がったり下がったりします。それと同じ力が「あかつき」にも作用します。「あかつき」の新しい軌道は、残された燃料の中で決める必要があり、当初計画の約8万kmよりもずっと大きな長楕円軌道となるため、金星から遠い距離を飛行する時間が長くなり、太陽重力による潮汐力の影響を大きく受けることになりました。現在の「あかつき」の軌道は、56日間(金星の公転周期の1/4)で近金点高度(金星に最も近づく点)が400km〜1万kmまで上がり、次の56日間で1万km〜400kmにまた下がる、これでも非常に安定した軌道にいるのですが、56日間で近金点高度を1万 km〜400kmまで下げる力を持つ太陽が、もう少しイタズラして、あと数百km下げるのはいとも簡単なことです。高度200kmまで下がると金星大気の影響で、「あかつき」が大気中で燃え尽きる可能性が出てきます。近金点高度が400kmより下がらない軌道とするために、金星に最接近する高度や場所を変えたり、金星への接近タイミングを変えたり、最適なVOI-R1の条件を見つけるために試行錯誤を繰り返しました。最終的に、太陽重力による潮汐力で、「あかつき」の近金点高度が「上がる効果」を受ける期間と「下がる効果」を受ける期間とが均等になるように金星への接近タイミング・高度・場所を再設計し、5年以上金星大気に落下しない軌道を提案することができました。この軌道案をベースに、探査機の各サブシステム担当に熱解析や電力解析等を実施してもらい、例えば、金星の陰に入る時間が長過ぎてバッテリがもたないとなった場合は、日陰時間がもう少し短くなる軌道とするべく再びVOI-R1の条件を見直します。軌道を変更するということはさらに燃料を必要とすることなので、残燃料が限られた「あかつき」にとっては一大事です。この「軌道設計⇔システム解析」のサイクルを2~3回経て、観測要求と探査機制約を全て満たす、5年以上安定して金星を周回できる軌道が完成しました。奇しくも失敗から5年後の同じ日、再挑戦に臨むことになりました。
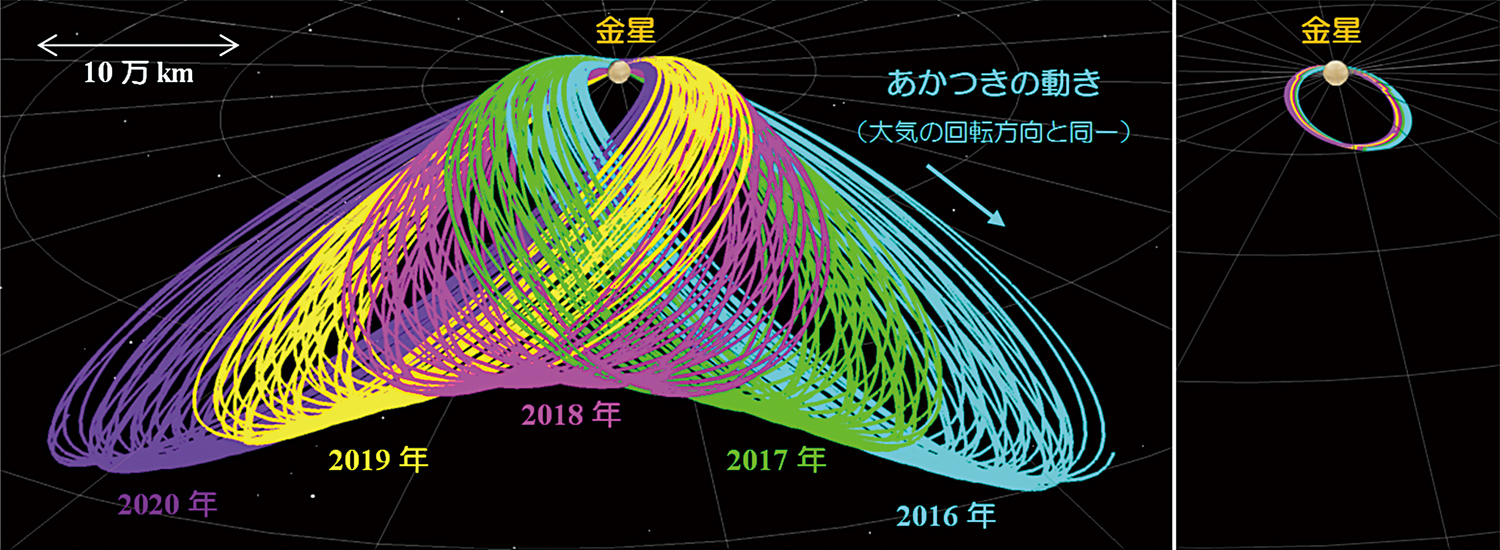
図1 金星の斜め北方向から見たあかつきの軌道の俯瞰図(左図: 実際 右図: 当初計画)
RCS噴射秒時を決める
軌道が確定したら、次はできる限りリスクの少ない金星周回軌道投入運用を検討しました。金星最接近を2015年12月7日とした場合、VOI-R1に必要な減速量は約202m/sです。しかし、この場合、誤差軌道を解析してみるとRCSの噴射誤差として+側は、わずか3%しか許容できません。一般に、エンジン(1液スラスタなど)は±5%程度の誤差は発生するものと考えられています。そのため、あえて減速量を4m/s減らし198m/sとすることで、VOI-R1での制御量誤差として+5%から-10%まで許容できるようにしました。この結果、RCS噴射秒時は1,228秒と決まりました。また、万が一、-10%より大きい誤差が発生して減速量が不足した場合でもVOI-R1を実現するべく、その状況を電波の伝搬遅延だけ遅れて8.5分後に地上でモニタしながら、追加の軌道制御(VOI-R1c)を実施することにしました。VOI-R1cの実施タイミングとしては、できる限り早い時刻に(金星から離れ過ぎないうちに)噴射するほど効率が良いので時刻を1分刻みでジワジワと詰め、それぞれに対応して追加で実施するRCSの噴射秒時を決定しました。
万々が一のための準備(それでも心配だから)
今回の再挑戦(VOI-R1)では、絶対に失敗は許されません。2010年の時はOME噴射が緊急停止したため、十分ではありませんが燃料が残りました。もし今回失敗すれば、その燃料を使い切ってしまうでしょうから、もう後はありません。実施すべきことは、ΔV方向に+Z軸(または-Z軸)を向けRCSを連続噴射する、それだけです。しかし、何らかの小さなエラーで制御装置がフリーズし、RCS噴射が中断するかもしれません。コンピュータ(CPU)が突然フリーズして動かなくなることはよくあることです。このため、まずΔV姿勢への姿勢変更は前日に実施することにしました。VOI-R1の当日に実施した場合に、突然通信が途絶えた時に、それが姿勢変更に起因するものなのか装置の異常なのか、判断が難しいと考えたためです。次に「RCS噴射が中断する」をトップ事象とするリスク評価を念入りに行いました。+Z側に取り付けられている4基のRCSを使用するか、-Z側の4基を使う方がより確実かについても、熱や電力を含めた議論が繰り返されました。もしRCS噴射が中断したことが確認されたら、すぐに何か対策が取れるのか、追加のΔVは間に合うかなど、図2に示すように、サブシステムごとに想定される異常事象を、緑色:噴射継続(影響なし)、桃色:噴射停止(制御失敗、救出不可能)、橙色:噴射停止後RCS再噴射により救出可能、に分類しました。さらに、即座に追加のRCS噴射(VOI-R1c)が行えるように、VOI-R1の成否にかかわらずVOI-R1cのための姿勢変更だけは実施することにしました。「あかつき」と地上局との間には片道で約8.5分の電波遅延があります。異常が検知されすぐに対策を指令しても、往復の電波遅延が加算されるため17分の遅れが生じます。また、異常事象の原因によっては地上からの指令そのものが拒否され、追加のRCS噴射ができないことがあります。すべての異常事象をVOI-R1cで救うことはできませんが、限られた時間制約の中で最大限の準備をして本番(VOI-R1)に臨みました。
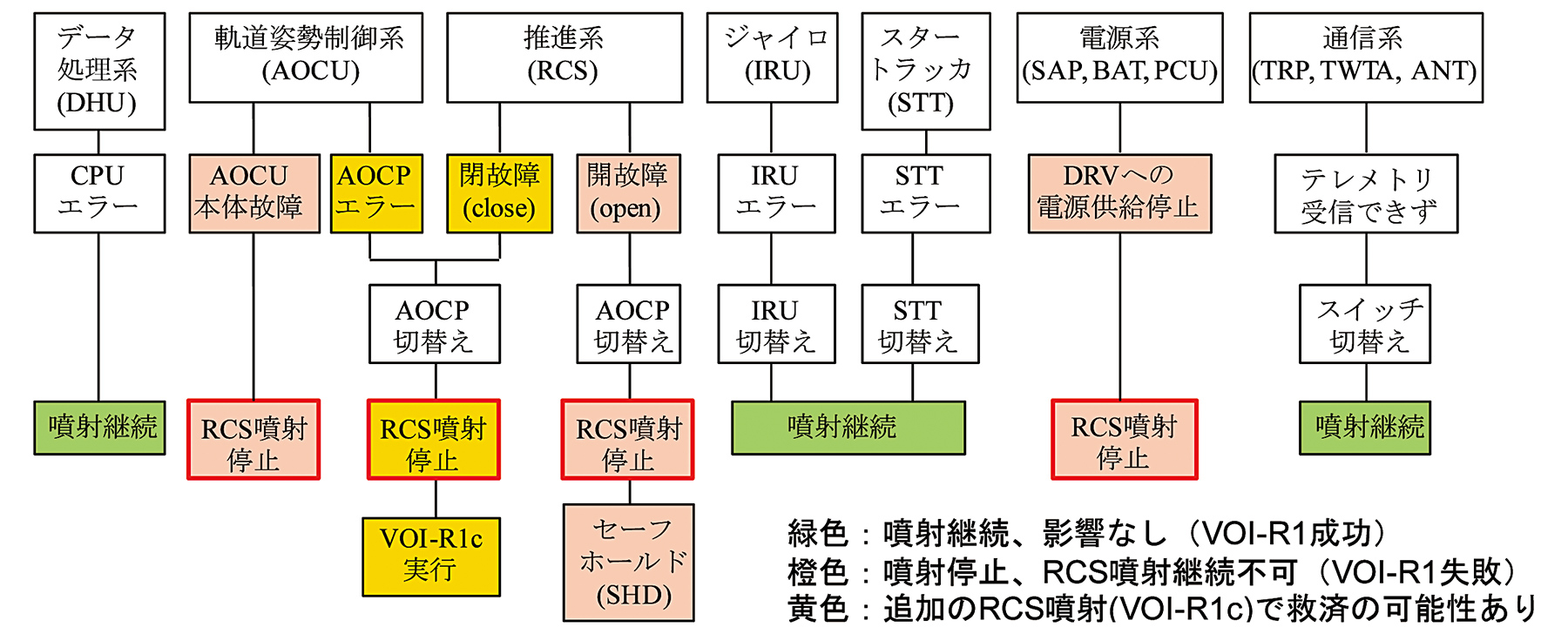
図2 各サブシステムにおける不具合事象とその影響
VOI-R1前日に実施したΔV姿勢への姿勢変更は無事完了しました。VOI-R1の当日、予定されたスケジュールに従い、各機器の動作モードが切り替わっていきます。そしてRCS噴射開始。すべてのサブシステムは正常に動作し、事前に心配していたCPUフリーズやメモリエラー等の異常事象は一切発生せず、4基のRCSは計画通り1,228秒間の噴射を継続し、VOI-R1は成功しました。この上なく長く感じた20分間でした。これにより「あかつき」は日本で最初の惑星周回衛星となりました。VOI-1からちょうど5年、設計条件を超える太陽熱入射に、搭載機器の劣化や故障を心配しましたが、5台の多波長カメラも正常に観測を開始し、金星大気科学に関する新しい成果の発見が期待されます。