
今月号から、小型月着陸実証機SLIM (Smart Lander for Investigating Moon)の連載がスタートします。SLIMは、月や惑星への高精度軟着陸技術(ピンポイント着陸)を開発し月着陸により実証すること、併せて軽量化のためのシステム技術を開発することを目的としています。これまでの各国の月着陸機はいずれも、その着陸精度は数kmから10数km程度であり、そのため、「海」と呼ばれる広く平坦なところに降りてきました。SLIMが目指す100mの着陸精度が実現できると、クレータ近傍や極域など、これまで降りたくとも降りられなかった場所への安全な着陸が可能となり、次世代の月惑星探査への扉が開かれます。
図1にSLIMの外観図を、表1に探査機の主な仕様を示します。特徴的な外観となっているのは、多量の推進薬を搭載するための大きなタンクを中心とした構造とすることで軽量化を図っていること、小型探査機でも斜面に安全に降りるために斜面に向かって機体を倒し込みながら着陸する「二段階着陸方式」を採用していること等によるものです。
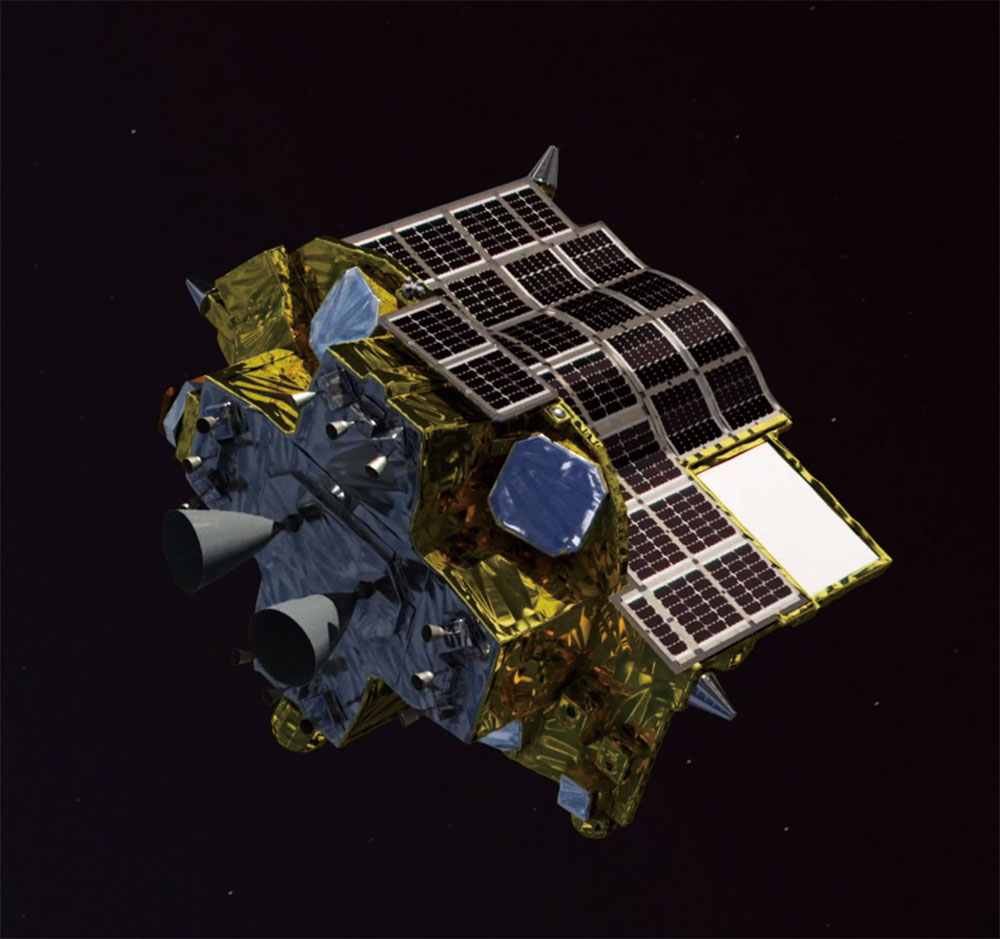
図1: SLIM外観図

表1:SLIMの主要な仕様
ピンポイント着陸を実現するためのキー技術の1つは、搭載カメラで撮像した月面画像からSLIMがクレータを識別し、その分布をクレータ地図と見比べることで自身の現在位置を把握する「画像照合航法」技術です。また、「画像照合航法」により自身の正確な位置を把握すると、着陸目標地点上空まで効率良く到達するためSLIMは自分の判断で軌道の修正を行います(「自律的な航法誘導制御」技術)。SLIMには、この「画像照合航法」技術や「自律的な航法誘導制御」技術を始め、大学の研究者の方々とも共同で開発してきた色々な新しい技術がてんこ盛りです。
SLIMの主な目的は小型実証機によるピンポイント着陸技術実証ですが、着陸後には月面での活動にも挑戦します。SLIMには「マルチバンド分光カメラ」という観測装置が搭載されており、着陸後、月内部に由来すると考えられている岩石の成分分析を行って、月の起源に関する手がかりを探る予定です。その目的に適した岩石は月面上の特定の場所にしか見つかっておらず、それらの場所はいずれもクレータ近傍で、傾斜のある複雑な地形をしている場所です。すなわち、ピンポイント着陸技術や二段階着陸技術が実現できて初めて実現できる観測ということになります。また、着陸直前には2つの小型プローブを分離します。2つのプローブはそれぞれ、月表面移動技術の実証や、月面上での写真撮影などに挑戦します。
技術開発要素が多く、その意味でチャレンジングなSLIM開発は、長く研究開発を主導してきたベテランと、エネルギッシュで意欲的な若手が両輪となって進めて来ました。この後の連載に登場するのは、実際に開発に当たってきた彼ら・彼女らで、各技術やその開発過程を、時にはその長い歴史を紐解きながら紹介してくれる予定です。H-IIAロケットで打ち上げられて月へ向かいピンポイント着陸するSLIMの姿も思い浮かべながら、連載記事を楽しんで頂ければと思います。
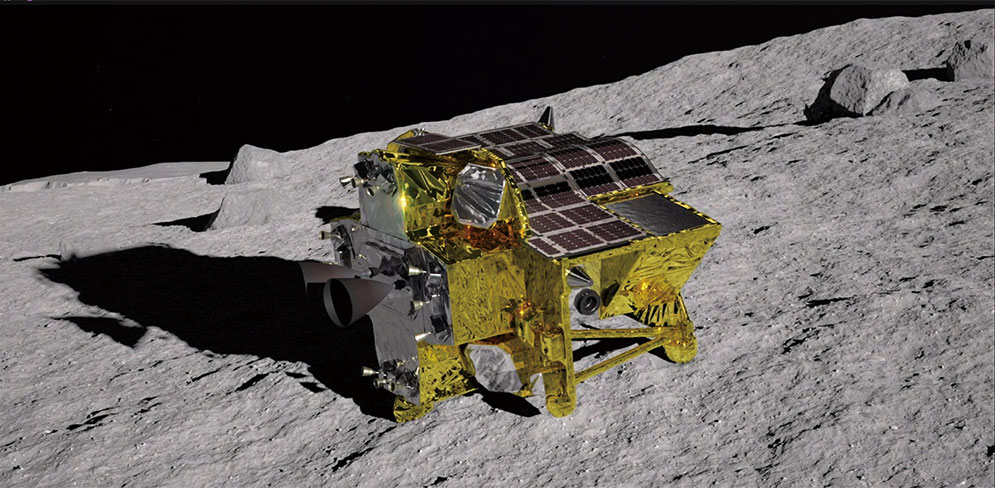
図2: 月面着陸後のSLIM
【 ISASニュース 2023年7月号(No.508) 掲載】