TOP > レポート&コラム > 宇宙科学の最前線 > 次世代の小天体表面探査ローバの実現に向けて
![]()

| │1│2│3│ |
はじめに
小惑星探査機「はやぶさ」は、ご存知の通り、手のひらサイズの小惑星表面探査ローバMINERVA(ミネルバ)を搭載していた。
MINERVAは、2005年11月12日の日本時間15時24分に「はやぶさ」から分離された。「はやぶさ」が小惑星イトカワにタッチダウンするための練習をしている最中である。予定では、小惑星からの高度70m、相対速度5cm/s以下で、MINERVAを分離するはずであった。実際には、MINERVA分離時の「はやぶさ」の高度は200mであり、相対速度15cm/sでイトカワから遠ざかっていたため、MINERVAは小惑星表面に落ちることなく、太陽を周回する世界最小の人工惑星になった。
MINERVAは分離後、18時間もの間「はやぶさ」との通信を持続し、その間にさまざまなデータを送った。しかし「はやぶさ」のアンテナの守備範囲外に出た後は、MINERVAがどうなったかは分からない。最後に送られたテレメトリデータを見る限り、MINERVA自体に異状はなく、小惑星表面とは違って全日照で、あらゆる状態が安定していた。ひょっとすると現在も生きており、データを送信し続けているかもしれない。
MINERVAによる探査は不完全燃焼のまま終わったが、MINERVAの開発や打上げ後の運用を通して得られた成果は数多くある。本稿では、MINERVAにより得られた成果をまとめ、今後の小天体表面探査ローバの構想について述べる。
| 図1 MINERVA | |
MINERVAの運用は楽
一般的に、ローバの運用システムとしてはどのようなものを想像されるだろうか?
アメリカの火星ローバでは、地球からローバを直接操作することは定常的にはやっていない。地球とローバの通信時には、過去にローバが取得したデータをテレメトリとしてローバから地球に送り、未来にローバが実行するシーケンスをコマンドとして地球からローバに送る。これは、地球と火星との電波伝播遅延が大きいことと、運用そのものの負荷を小さくさせるためであり、ローバをある程度自律化させる必要がある。
MINERVAを分離した2005年11月時の地球とイトカワとの距離は約3億kmであり、往復で30分以上の電波伝播遅延が存在する。地球からMINERVAを遠隔操縦することは不可能に近いため、MINERVAは分離後、完全に自律動作するように作ってある。つまり、地球からのコマンドは本質的に不要であり、運用といっても地上でデータが来るのを待っていればよい。とは言いつつ、自律探査のためのパラメータを変更することは可能であり、より良い探査を行うために日々パラメータをチューニングする予定であった。
MINERVAが分離後に取得したデータを図2、3に示す。画像は唯一、1枚だけ届いている。分離直後に「はやぶさ」本体を撮影したもので、太陽電池パドルが写っている。
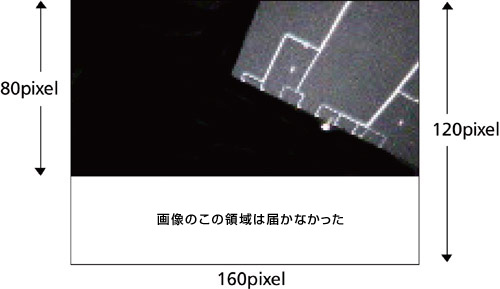
| 図2 MINERVAが取得した唯一の画像 | |
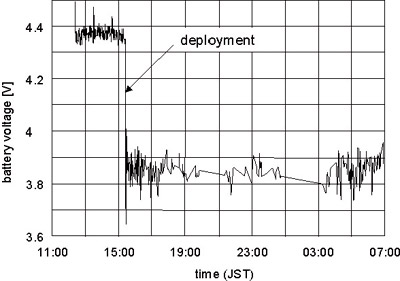
| (a)バス電圧 | |
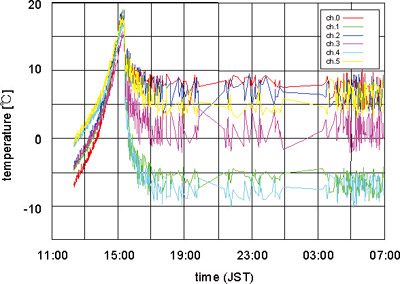
| (b)外部温度 | |
| 図3 分離後のMINERVAのテレメトリ。 | |
| (a)バス電圧と(b)外部温度計の履歴。値が大きく変化する時刻が分離した瞬間である。温度は太陽からの放射、小惑星からの放射、自己発熱がバランスしており、小惑星からの熱放射に関する知見が得られるかもしれない。 | |
MINERVAの工学的成果
微小重力環境での移動メカニズム
MINERVAの目玉の一つが、ホッピングにより微小重力環境を移動する能力である。小惑星表面での実地検証はできなかったが、打上げ前に落下塔を利用した無重力実験を数多く実施しており、微小重力環境における移動メカニズムはある程度確立できた(図4)。
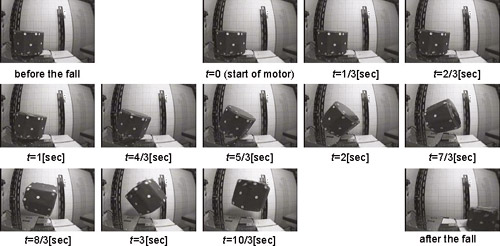
| 図4 | 落下塔を利用した無重力実験によるローバの運動。小惑星表面に降りたら、このような運動をしただろう。 |
ホッピング移動メカニズムでは、ホップ後、再び表面に戻ってきたときに、なるべく早く位置・姿勢を安定させ、次のホップができる態勢にする必要がある。しかし、表面との再接触時に位置・姿勢を能動的に収束させるよい解は存在しないため、ダンピングにより運動エネルギーが消滅するのを待つしかない。
この点に関しては、ターゲットマーカや「はやぶさ」本体が比較的短時間で小惑星表面に静定していることから、MINERVAもホップ後、複数回のバウンド後、比較的すぐに小惑星表面に再静止すると考えられる。ただしこれは、ターゲットマーカと「はやぶさ」の着地点が、比較的重力が大きく、細かい砂れきがたくさん存在すると思われている地点であることが大きく影響しているだろう。
| │1│2│3│ |