TOP > 儗億乕僩仌僐儔儉 > 塅拡壢妛偺嵟慜慄 > 師悽戙偺彫揤懱昞柺扵嵏儘乕僶偺幚尰偵岦偗偰
![]()

| 劆侾劆俀劆俁劆 |
彫揤懱昞柺偱偺帺屓埵抲摨掕
丂帺屓埵抲摨掕偵娭偟偰偼丄彫揤懱屌掕嵗昗宯偱偺宱堒搙傪媮傔傞愨懳帺屓埵抲摨掕偲丄婎弨偲側傞傕偺偐傜偺憡懳揑側埵抲娭學傪媮傔傞憡懳帺屓埵抲摨掕偑偁傞丅
丂変乆偑峫偊偰偄傞彨棃偺彫揤懱扵嵏儘乕僶偼丄俵俬俶俤俼倁俙偲摨偠偔偦傟傎偳戝偒偔側偄傕偺偱偁傝丄彫揤懱昞柺忋偵偁傞応崌偺僇儊儔偺帇栰偼偛偔嬤朤偵尷傜傟傞丅儘乕僶搵嵹僇儊儔偵傛傝栚昗暔懱傪偲傜偊傞偙偲偼丄傛傎偳栚昗抧揰偑嬤偔側偄尷傝晄壜擻偱偁傝丄宱堒搙側偳偺嵗昗偵傛傝栚昗抧揰傪梌偊傞偙偲偵側傞丅傛偭偰丄愨懳埵抲摨掕庤朄偑朷傑偟偄丅
丂儘乕僶偺扵嵏栚昗埵抲偼丄恖娫偑巜掕偡傞偨傔丄彫揤懱傪奜晹偐傜尒偨偲偒偺嵗昗丄偮傑傝抧怱宱堒搙偲側傞丅偙傟偵懳偟偰丄彫揤懱昞柺忋偺儘乕僶扨撈偱應埵傪峴偆偲丄彫揤懱偦偺傕偺傊偺婎弨曽岦偑嬊強揑側廳椡壛懍搙偲側傞偨傔丄媮傔傜傟傞埵抲偼應抧宱堒搙偵側傞丅偄傃偮側揤懱偵偍偄偰偼丄抧怱宱堒搙偲應抧宱堒搙偼戝偒偔堎側傞偨傔丄奜晹偐傜栚昗抧揰傪梌偊偰傕丄儘乕僶偼堎側傞抧揰傪栚昗抧揰偲偟偰擣幆偡傞偙偲偵側傞丅
丂尰嵼偼丄彫揤懱偺傑傢傝傪旘峴偟偰偄傞偱偁傠偆曣慏偐傜偺揹攇巟墖偵傛傝儘乕僶偺埵抲傪摨掕偡傞庤朄偺専摙傪峴偭偰偄傞丅偙偺庤朄偩偲丄儘乕僶偺帺屓埵抲傕抧怱宱堒搙偱梌偊傞偙偲偑偱偒傞乮恾俇乯丅
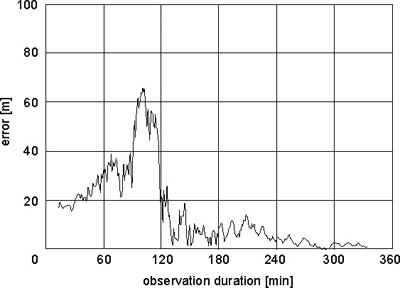
| 恾6丂 | 曣慏偐傜儘乕僶傑偱偺嫍棧傪應傞偙偲偱丄儘乕僶偺帺屓埵抲摨掕傪峴偆僔儈儏儗乕僔儑儞寢壥偺堦椺丅彫榝惎僀僩僇儚偺傑傢傝傪曣慏偑懭墌婳摴偱廃夞偟偰偄傞応崌傪壖掕偟偰偄傞丅墶幉偼應埵帪娫偱廲幉偑埵抲惛搙傪帵偡丅 |
儘乕僶偺僔儕乕僘壔偲僙儞僒偺搵嵹
丂俵俬俶俤俼倁俙僔僗僥儉偼丄乽偼傗傇偝乿傊偺搵嵹帪傕僆僾僔儑儞婡婍偩偭偨偨傔丄曣慏偲側傞扵嵏婡傊偺僀儞僷僋僩偑側傞傋偔彫偝偔側傞傛偆丄偄偮偱傕拝扙偱偒傞傛偆偵嶌偭偰偄傞丅偙偺傛偆側僐儞僙僾僩偺塅拡婡偺偨傔丄尰嵼丄俵俬俶俤俼倁俙屻宲儘乕僶傪悽奅拞偺彫揤懱扵嵏儈僢僔儑儞偵採埬偟偰偄傞丅偙傟偑慡晹捠傞偲丄懡偔偺儘乕僶傪幚嵺偵嶌傜側偗傟偽側傜側偔側傞丅
丂俵俬俶俤俼倁俙僒僀僘偺挻彫宆儘乕僶偲偄偊偳傕堦偮偺塅拡婡偵堘偄偼側偔丄戝宆塅拡婡偲摨偠偔丄偁傜備傞僒僽僔僗僥儉傪帩偭偰偄傞丅偙偺偨傔丄堦偮堦偮儈僢僔儑儞偵墳偠偰儘乕僶傪愝寁偡傞偙偲偼旓梡傗帪娫偺揰偐傜傕柍棟偱偁傞丅偦偙偱丄埲壓偺愝寁曽恓偱崱屻偺彫揤懱扵嵏儘乕僶僔僗僥儉傪嶌傝丄廀梫偵墳偠偰嫙媼偟偨偄偲峫偊偰偄傞丅
仠 嫟捠偵巊偊傞挻彫宆儘乕僶梡偺俠俹倀僔僗僥儉傪奐敪偡傞丅
仠 搵嵹僙儞僒偺僀儞僞僼僃乕僗偼摨堦偵偡傞丅
仠 搵嵹僙儞僒偼儈僢僔儑儞偵墳偠偰曄峏偡傞丅
仠 揹尮宯傗擬惂屼丄儘乕僶偺戝偒偝傪懳徾揤懱偵傛偭偰枅夞愝寁偡傞丅
乮傛偟傒偮丒偰偮偍乯
| 劆侾劆俀劆俁劆 |