TOP > レポート&コラム > 宇宙科学の最前線 > BepiColombo MMOの熱制御系
![]()

| │1│2│3│ |
はじめに
BepiColombo――多くの方には耳慣れない言葉だと思いますが、これはESA(欧州宇宙機関)とJAXAが協同で進めている水星探査ミッションの名前です。太陽に一番近い惑星である水星はいくつか特異な性質を持っており、自転と公転周期が2:3の関係になっていることもその一つです。それを最初に指摘したのがイタリアの応用数学者Giuseppe Colombo(1920〜1984年)でした。太陽に最も近い惑星であるために、水星は地球からの観測が難しく、また探査機による観測も米国のマリナー10号(1974〜1975年)とMESSENGER(2011年〜)によるものがあるだけです。マリナー10号は金星スイングバイを利用して水星に3回近づきましたが、この方策をNASAに提案したのが、このColombo博士でした。彼の名前にちなんで名付けられた「BepiColombo」(BepiはGiuseppeの愛称)は、2000年10月にESAの5番目の大型計画(コーナーストーンミッション)として正式に認められました。BepiColomboはESAの計画ではありますが、筆者が入所した1998年以前から宇宙科学研究所の水星探査ワーキンググループでも独自の水星探査計画が検討されていた関係で、1999年秋に行われたESA-ISAS会議においてESA側から協力の打診があり、共同ミッションとするための協議が行われました。その結果、宇宙研が水星磁気圏探査機(Mercury Magnetospheric Orbiter:MMO)のシステム設計・製作・運用を担当し、サイエンス面ではESA側の水星表面探査機(Mercury Planetary Orbiter:MPO)も含めて日欧を中心とする国際協力で計画を推進する体制が整いました。
ESAはMMO以外の、(1)BepiColomboミッション全体の設計、(2)MPO、電気推進モジュール(Mercury Transfer Module:MTM)、MMOサンシールド(MMO Sunshield and Interface structure:MOSIF)の設計・製作・運用、(3)複合モジュール(Mercury Composite Spacecraft:MCS)の組み立て・試験および打上げを担当します。
BepiColomboは、MMO、MPOという2つの衛星でもって、水星の固体内部から表面、磁気圏に至るまで、さまざまな謎に一気に迫ろうとするミッションです。その主な目的は、
・恒星に近い惑星の起源と進化を調べる
・惑星としての水星を調べる:その形態、内部構造、地質学、組成、クレーター
・水星の外気圏大気を調べる:その構造とダイナミクス
・水星の磁気圏を調べる:その構造とダイナミクス
・水星の磁場の起源を調べる
・水星の極の物質を調べる:その組成と起源
・アインシュタインの一般相対性理論の実証
です。MMOには電場・磁場を計測する装置や、プラズマ粒子や中性粒子を観測する装置、大気カメラ、ダスト観測装置が搭載され、主として水星磁気圏を調べることを目的としています。
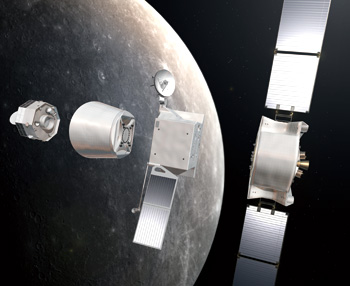
MMOは、水星までMPOとともに複合モジュール(MCS)という形で運ばれます(図1)。MCSは、電気推進モジュール(MTM)、MPO、MMOサンシールド(MOSIF)、MMOから構成されています。MCSは3軸安定姿勢で運用されます。一方、MMOは後述するようにスピン衛星でスピンを前提に設計されているために、太陽に近づいたときスピンしない3軸安定姿勢では高温に耐えられません。そのため、MMOは、水星到着までMOSIFにより太陽光から防護されます。
|
MCSは2014年にアリアン5ロケットによりフランス領ギアナから打ち上げられ、電気推進と地球スイングバイ、金星スイングバイ、水星スイングバイを経て、6年後の2020年に水星に到着します。到着後まずMTMが切り離され、その後MPOの2液式の化学推進により水星周回軌道に投入されます。MMOの周回軌道(極軌道、近水点400km、遠水点1 1824km)でMMOを分離、その後、MOSIFを分離したMPOは遠水点高度を下げて周回軌道(極軌道、近水点400km、遠水点1508km)に入ります。MMOは打上げから分離直前まで、打上げ直後と年数回のチェックの期間を除いて休眠状態(Dormant mode)で運用されます。
| │1│2│3│ |