
近日参上「はやぶさ2」
〜リュウグウの乙姫殿、お宝をいただきます。〜
●小型探査ローバMINERVA-II1、いよいよ小惑星へ着陸
小型探査ローバMINERVA-II1は、Rover-1AとRover-1Bの2機から構成されています。小惑星探査機「はやぶさ2」に搭載され、リュウグウ近傍に滞在しています。MINERVA-II1は、地球からのコマンドで時々電源をONにして、「はやぶさ2」母船との無線通信により、健康状態をチェック、すこぶる良好です。
MINERVA-II1は、初代「はやぶさ」に搭載した「ミネルバ」を継ぐ第二世代の探査ロボットです。小天体のような微小重力環境下での移動メカニズムの実証と自律探査行動技術の確立を目的としています。重力の小さい環境で移動するためには、従来の車輪型ロボットは、うまく動くことができません。そこで内部モータによる新しいトルカ移動方式を考案しました。
地球との往復通信時間に数十分かかる惑星探査では、地球からの遠隔操作は難しい。また、小惑星の表面状態、温度環境、重力環境もよくわからない天体表面で、環境に適応しながら自律的に探査することが求められています。MINERVA-II1には人工知能が搭載され、暑い昼間には昼寝をし、夜も寝て、朝と夕方に活動します。未知の環境で、電力が限られている中、どのような行動を行うか、自分で判断するロボットです。また、カメラと温度センサを搭載し、小惑星の表面の微細な写真を撮像し、また表面温度を計測します。科学的な知見が得られれば幸いです。
「はやぶさ2」 MINERVA-II1担当 久保田 孝(くぼた たかし)
2018年9月21日、MINERVA-II1が探査機から分離され、無事にリュウグウ表面に到達しました( ISASニュース 2018年10月号(No.451) 4P参照)。2機ともリュウグウ表面でホップし、その表面の写真を送ってきました。これは、世界初の成功です。
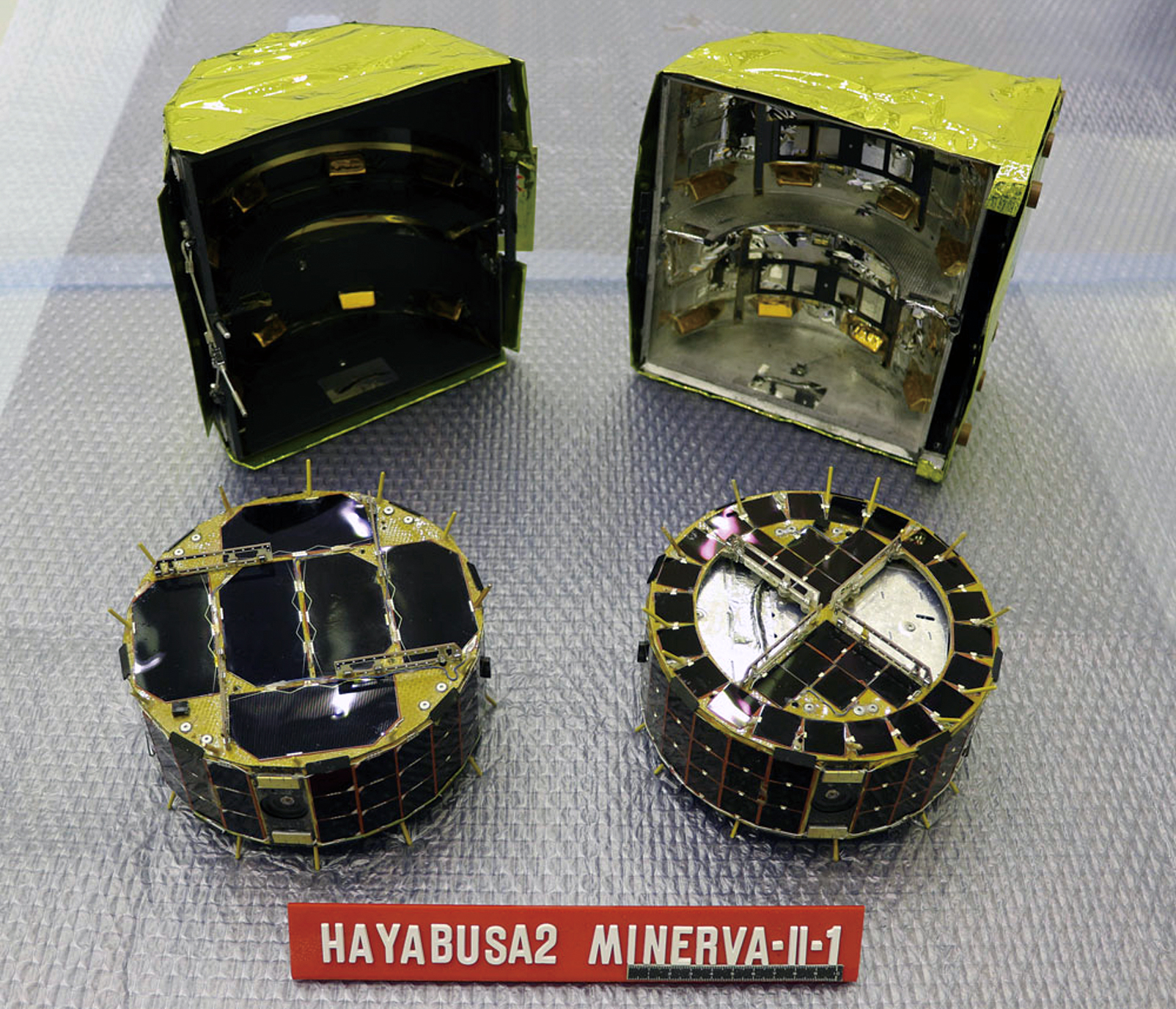
図 MINERVA-II1探査ローバシステム(フライトモデル)
左上:分離装置OME-B、右上:分離装置カバーOME-C 左下:Rover-1A、 右下:Rover-1B
●リュウグウを表面で探査する─小型着陸機MASCOT
「はやぶさ2」には、小型ローバMINERVA-II1が2機とMINERVA-II2が1機に加えて、小型着陸機であるMASCOTが搭載されています。MASCOTは、Mobile Asteroid Surface Scoutを短く呼んだ名称です。DLR(ドイツ航空宇宙センター)とCNES(フランス国立宇宙研究センター)によって製作されました。したがってMASCOTチームは、主にヨーロッパの技術者・科学者からなっています。「はやぶさ」の後継機を検討していたときに、本格的な観測装置を組み込んだ着陸機を搭載したらどうかという議論があり、着陸機の部分はヨーロッパが協力するという方向で議論が進められました。最終的には探査機の規模が「はやぶさ」と同等程度になりましたので、着陸機の規模も縮小され、約10 kgの機体を開発することになりました。
MASCOTは4つの科学観測機器を搭載しています。1つはMASCAM(マスカム)と呼ばれている広角のカメラで、リュウグウ表面の写真を撮影します。2つ目は、MicrOmega(マイクロオメガ)と呼ばれている近赤外の分光顕微鏡で、表面の鉱物組成を調べます。3つ目は、MARA(マラ)と呼ばれている熱放射計で、リュウグウの表面温度を測定します。そして4つ目はMASMAG(マスマグ)と呼ばれている磁力計でリュウグウ表面の磁場を計測します。MASCOTは、MINERVA-IIと同様にジャンプして移動できます。ただし、ジャンプするのは1回だけです。太陽電池は搭載せずにバッテリーだけで動作するために、寿命は16時間くらいです。これはリュウグウでの一昼夜を1日としたときの約2日分です。この間にリュウグウ表面を観測し、「はやぶさ2」に無線でデータを送り届けます。データがきちんと取得されることを期待しています。
DLR MASCOT プロジェクトマネージャ Tra-Mi Ho(トラミ ホー)(日本語訳 吉川 真)
2018年10月3日に、MASCOTは探査機から分離され、無事にリュウグウ表面に到達しました。4つの科学観測機器からのデータも取得しています。

図 MASCOTフライトモデル(探査機に搭載したもの)
【 ISASニュース 2018年10月号(No.451) 掲載】