
月惑星への着陸探査機
1966年、旧ソビエトのLuna 9により人類が初めて月軟着陸を果たして以来、今日までに110機の月惑星着陸探査機が打ち上げられている。Luna 9では、月面直前で減速のための逆噴射後、エアバッグに包まれた着陸機を分離投下し、世界で初めて観測機器の月惑星表面への軟着陸を成功させている。その後、旧ソビエトが1976年にLuna 24で月面からのサンプルリターンを成功させるまで、米国と合わせて計44機の月着陸機が打ち上げられた。それ以降、探査活動は静まっていたが、近年はイスラエルの民間企業や中国、インドが月着陸を試み、また、米国や日本の民間企業もそれに続いて着陸機を送り込むことを計画しており、月への着陸探査が再び活発化している。
日本では、2021年打上げ予定の米国SLS(Space LaunchSystem)搭載のOMOTENASHI(Outstanding Moon explorationTechnologies demonstrated by Nano Semi-Hard Impactor)ならびに2022年度打上げ予定のSLIM(Smart Lander for InvestigatingMoon)による月面着陸探査ミッションが計画されている。また、2024年の打上げを目指し、 火星衛星探査計画MMX(MartianMoons eXploration)が、火星の月であるフォボスへの着陸に向けて進行中である。
これまでの探査機の着陸成功率は約42%で、失敗の中で着陸シーケンス時に発生した異常は20件程度となる。Luna 8では、エアバッグが破れスピンが発生し、その遠心力により燃料が排出できずに減速不足で失敗に至っている。また、彗星への着陸を目指したPhilaeは、二回バウンドし、目標地点から大きくはずれたため、必要な電力を確保できず、計画されたミッションを行うことができなかった。このPhilaeの着陸において、約50Jの運動エネルギーを持って彗星表面に接触し、着陸装置内部の減衰および表面との摩擦により90%以上のエネルギー散逸をした。しかし、アンカーがうまく機能せず、10%のエネルギーが残り、表面をバウンドし、大きな水平移動と共に転倒が起きている。
これらの失敗例からわかるように、保護しなくてはならない探査機部位への着陸時の衝撃(加速度)を緩和し、着陸時に探査機が持つ運動エネルギーを減少させることが、安全な着陸を実現すると考えられる。このような着陸時の探査機の挙動を「着陸ダイナミクス」と呼び、様々な条件下での月惑星表面環境との相互作用でどのような挙動が発現するのかを予測し制御することが、この分野の核となる技術であり、本稿ではその一端に触れる。
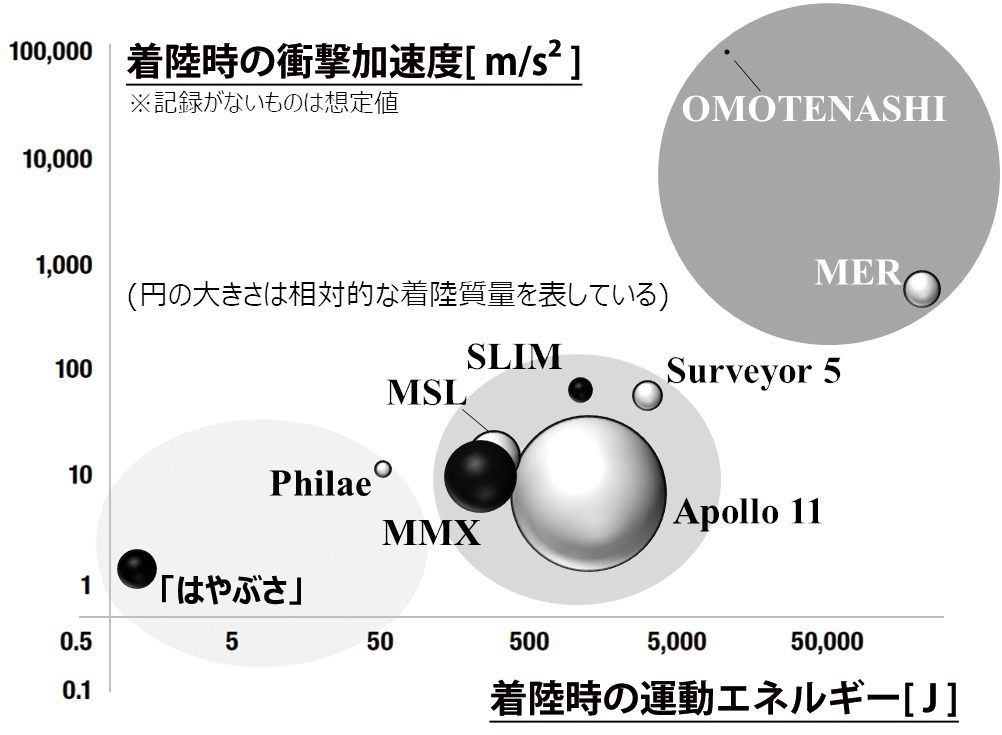
図1 着陸時の惑星探査機の運動エネルギーと天体への衝突加速度の相関
図1に探査機着陸時の運動エネルギーと天体への衝突加速度の相関を示す。図1の中ほどにあるグループでは、着陸時の衝撃や転倒から探査機を保護し、高度なミッションを実現するために、逆噴射ロケットエンジンと着陸脚を併用している。NASAの火星表面探査ミッションで用いられたSkycrane方式を除き、表層近くでは逆噴射を避け、惑星表層物質レゴリスの舞い上がりを抑えて自由落下を行うフェーズが最後に設けられ、衝撃吸収材を用いて着陸時の運動エネルギーを散逸させている。同じグループに位置するSLIMは、同様に3Dプリンタで製造した衝撃吸収材を着陸パッドに搭載して運動エネルギーを散逸させるだけでなく、高度な姿勢制御により最終的な姿勢で接地脚間距離を大きくとり転倒を抑制する手法を採用している。また、MMXは、微小重力の天体を探査するにも関わらず、着陸質量が大きいため、高重力惑星の探査に匹敵する意外と大きな運動エネルギーを着陸時に吸収または散逸させる必要があることが図1からわかる。
一方、右上のグループに位置する火星探査ローバ(MER)ミッションでは、パラシュートで大気減速や逆噴射による減速の後、着陸時にエアバッグを用いている。MERは高精度なピンポイント着陸を捨てる代わりに、安全かつ軽量な装置で着陸を試みた例であり、同方式の着陸装置を用いた3つのミッションはいずれも成功している。MERに匹敵する運動エネルギーと大きな衝撃を持って月面に到達するOMOTENASHIは、総質量14kgの探査機で、月面へ1kg程度の観測装置を適度に軟着陸させるという野心的なミッションである。エアバッグと3Dプリンタで製造した衝撃吸収材の両方を利用し、さらに樹脂で充填された耐衝撃構造を着陸機に搭載し、成功に向け開発が進められている。
着陸ダイナミクス(転倒の抑制)
安全な着陸の基本は、探査機を破壊しない、機能を低下させないことである。一般的な着陸脚を持った探査機では減速後の転倒を抑制することが重要である。その際、降りる天体の重力加速度、着陸時の速度方向と大きさ、探査機自体の倒れにくさに加えて、探査機と未知の惑星表面との相互作用で決まる探査機の挙動の推定がその鍵を握る。
低重心で着陸脚の間を広げるほど倒れにくくなるのは自然だが、特に小天体表面では、姿勢を戻すための復元力としての重力が小さく、着陸時に散逸しきれなかった残存エネルギーで、接地後、探査機は容易に転倒し得る。また、積極的にスラスタ噴射等の手段で転倒を抑えることも考えられるが、新たなエネルギーが着陸脚や地盤が持つ弾性に蓄えられ、噴射停止後に解放されバウンド等新たな運動を発現することに繋がるため、正確に探査機の挙動を予測した上で用いることが必須である。
探査機の着陸ダイナミクスを把握するため、事前の地上実験やシミュレーションによる総当たり評価を行う。特にシミュレーションの妥当性を得るため、惑星表面の重力環境や機械特性を地上で再現してその環境下で探査機の挙動を確認することが重要である。小さな重力の環境での試験、例えば、航空機実験(微小重力含む低重力環境)や落下塔試験(微小重力のみ)での設計の検証が不可欠となる。なお、地上での低重力試験は数秒から数十秒の時間制約内で行う必要があり、また、表層物質の粒径分布や形を模擬したレゴリスを利用し、その重力依存性を把握して試験に臨むことが肝要である。
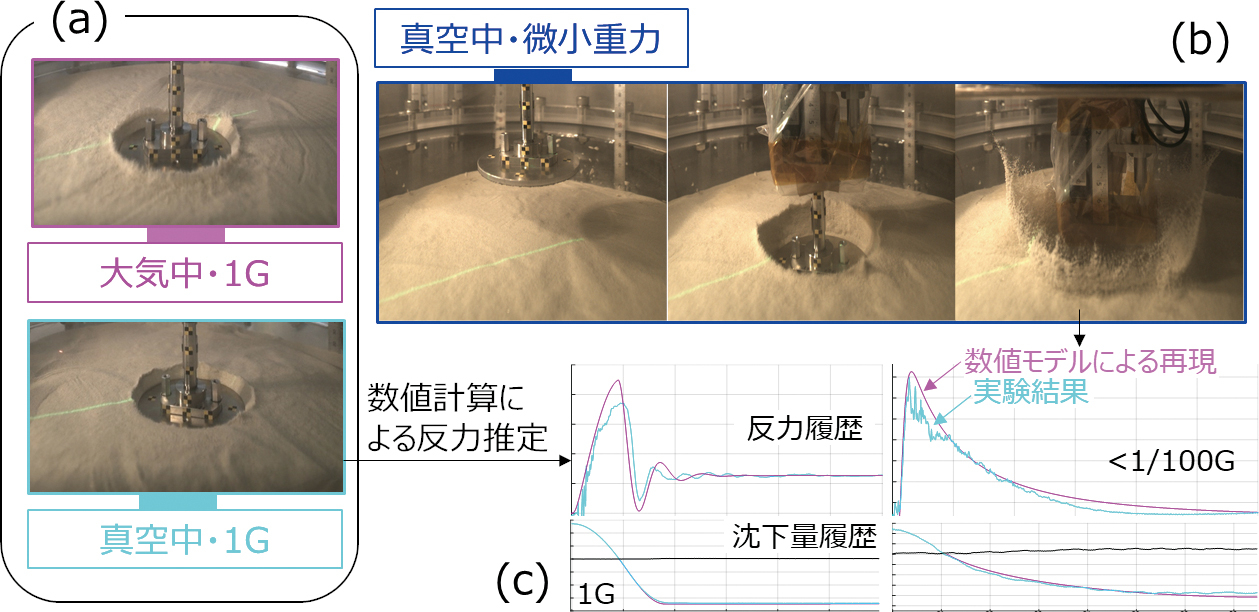
図2 環境作用(重力の大きさ,大気の有無)に依存した粉粒体のふるまいの違いと反力の予測
図2に、1G(地球の重力)および微小重力環境での試験において、同じ質量ならびに同じ速度を持った着陸パッドが試料へ衝突した際の実験結果を示す。対象試料として東北硅砂8号を用い、その粉粒体中へ直径70mmの着陸パッドを模擬したアルミの円板を0.6m/s程度で衝突させる試験を行っている。パッド上部には約3kgの計測器を含む錘が搭載され、試料含め真空中内(100Pa以下の減圧下)に置かれている。これらの試験体が入った真空チャンバが落下カプセルへ搭載され、約4.7秒の間、真空中を自由落下している際の試験結果が示されている。
1G下で大気の有無の比較(a)では、衝突時の砂の飛散の様子が違うことに加えて、反力の程度は同じだが、大気がある場合はその履歴に高周波の変動が観測されている。次に、微小重力の結果(b)では、1Gで沈下量の増加に応じて反力が大きくなるのに対して、微小重力ではその振幅値が大きく下がり、また、反力は衝突直後が一番大きく、その後長い時間をかけて小さくなっていく履歴をたどる。これをシミュレーションで再現(c)しようとすると、地上でよく用いられる砂地盤への圧縮力に基づく相互作用力の推定式で再現することは難しいが、速度の二乗に比例した反力を想定すると、定量的にも、挙動としてもよく合う推定結果を得られる条件があることがわかっている。
このように、低重力における粉粒体と機械の相互作用のより精緻な把握が、実際の天体表面での探査機の着陸ダイナミクスの予測に不可欠である。
着陸ダイナミクス(衝撃の緩和)
着陸時に高速な衝突が考えられる場合、表層物質の柔らかさが想定通りであることを期待するにはリスクが伴うため、探査機に衝撃緩和方策を搭載し破壊から保護すべきである。方策のひとつは等加速度で減速させること、もうひとつは減速する距離を長くして衝突速度が0になるまでの時間を十分長くすることである。
前者では、塑性変形を利用した衝撃吸収材の定荷重を示す範囲で使用して衝撃を半分にすることが可能で、後者ではエアバッグ等展開構造を利用して減速距離を増加させ、それに反比例して衝撃加速度を小さくさせることが可能となる。
衝撃吸収材は、要求する衝撃レベルと吸収エネルギー量から、その寸法が一意に設計できる反面、機能の指向性が高いため、確実に動作させるためには着陸脚や探査機下面等へ搭載して衝突方向を制御する必要がある。一方、エアバッグを用いた場合、運動エネルギーの散逸性能はあまり期待できないが、展開構造特有の大きな減速距離を確保できるため、搭載サイズの限定される小型探査機等で用いると効果的である。
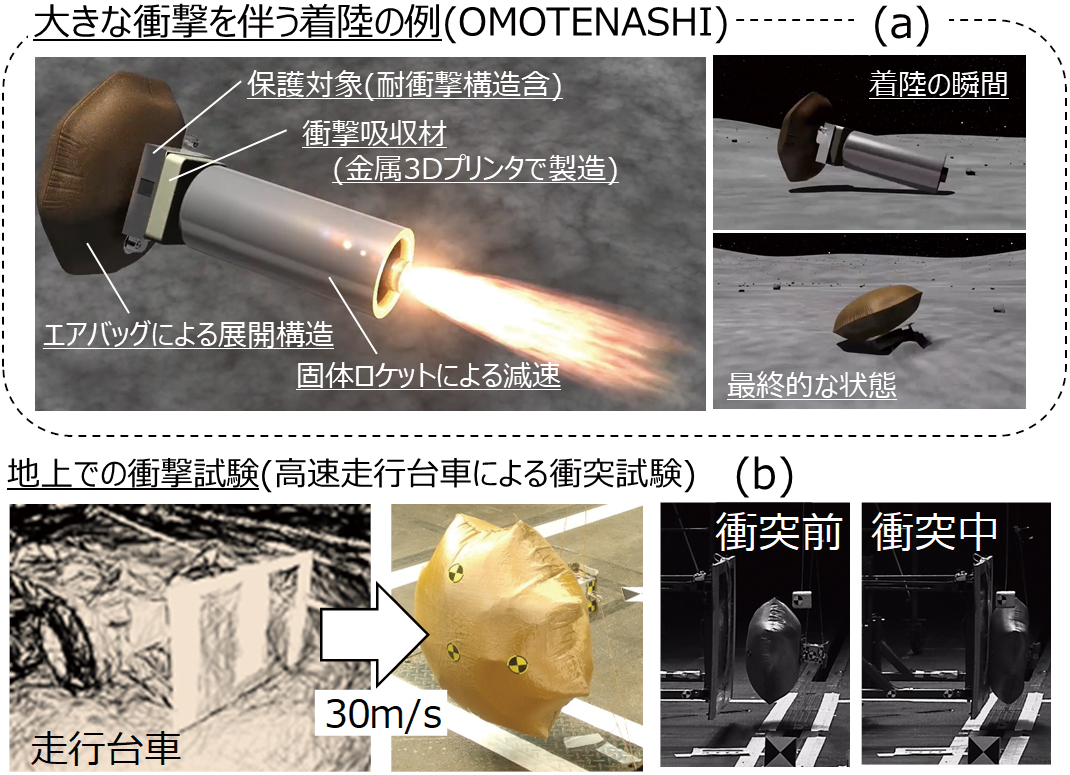
図3 大きな衝撃を伴う着陸(OMOTENASHIを例に)と高速走行台車による衝突試験
図3に示すように、OMOTENASHI探査機(a)では、秒速50mの衝突速度から約1㎏のペイロードを守るように、固体ロケットエンジンによる減速に加えて、保護対象との間に着陸方向に対する衝撃吸収材が搭載されている。また反対側には左右の保護も兼ねたエアバッグが展開し、保護対象自体も耐衝撃構造を持つ。エアバッグは展開型エアロシェル実験超小型衛星(EGG)で開発された実績品と同じ構成で製造され、衝撃吸収材はSLIMで開発された金属3Dプリンタの造形品と同じ方法で製造されている。耐衝撃構造としてLunar Aのペネトレータで開発された樹脂充填構造を採用している。この方式ではまず着陸時に固体ロケットエンジンと衝撃吸収材を惑星表面へ衝突させ、その塑性変形により、保護部位に加わる衝撃加速度を8,500G程度になるように制御しつつ運動エネルギーを散逸させ、レゴリスへの沈下も利用して減速を図る。そして、エアバッグの大面積を保持して、深い沈下を防ぎつつ、バウンドした場合でも、エアバッグにより2、3度目の衝撃を軽減できるようになっている。
エアバッグのような展開構造の衝撃緩和特性を評価するには、地上において大きな衝撃加速度と衝撃エネルギーを与える検証試験が必要となるが、大気による減速をキャンセルするために多くのリソースを要することになる。そこで、エアバッグ自体が高速で動くのではなく、模擬した天体表面が動き、衝撃緩和装置に衝突する地上試験方法が編み出された。図3(b)に示されるように惑星表面を模擬した台車をエアバッグや衝撃吸収材へ時速108kmで衝突させ、結果として、エアバッグによる衝撃緩和レベル600G、衝撃吸収材による3,000Gを達成し、設計理論の確認と共に、地上試験方法を確立している。また、真空中での砂面衝突や衝突時の姿勢反転も評価しており、設計の想定範囲の逸脱程度を確認する地上試験も実施している。
おわりに
最後に、月惑星表面への安全な着陸を実現し、ミッションの価値を低下させないためには、探査機の着陸ダイナミクスを考慮した着陸装置の搭載が不可欠である。ただし、着陸条件や月惑星表面環境を地上で再現するのは困難なため物理的な地上試験には限界があり、探査機の着陸ダイナミクスを数式化したシミュレーションでの設計検証が今後多用されると考えられる。そして、探査機内部にも重力依存で変化するダイナミクスを持ち、また、環境の作用も重力により様変わりすることを考えると、惑星表面自体のふるまいや表面との相互作用の予測精度を上げる研究開発の進展、国際宇宙ステーションでの人工重力発生装置を利用した低重力環境での長時間の検証が可能な試験環境の充実が今後期待される。
【 ISASニュース 2020年8月号(No.473) 掲載】