
地上系というのはロケットや人工衛星・探査機と比較すると目立たない存在ですが、それでも臼田宇宙空間観測所の64mアンテナや衛星管制室など"絵になる"ものはいろいろあります。しかし、「軌道決定」というと、関係者しか知らないような"地味中の地味"的存在です。ここでは、この軌道決定グループについてご紹介したいと思います。
「軌道」というもの自体、一般的にはあまり分かりやすいものではないですが、それでも、例えば探査機が目的の天体まで行く軌道とか、人工衛星の地球周回軌道などを図に描くことができます。しかし、これらは「軌道設計」(あるいは「軌道計画」)というグループの仕事なのです。では、軌道決定グループが何をしているかというと、探査機や人工衛星が打ち上がった後、それらがどこをどのような速度で動いているのかを推定する仕事をやっています。分かりやすく言うと、打ち上がった後にどのような軌道に沿って動いているのかを調べているのです。
軌道決定では、使う装置は普通のコンピュータですし、結果として出てくるのは位置・速度などの数値です。図も出力されますが、その図はO-C(オー・マイナス・シー)と業界用語で呼ばれるものです。Oは観測値、Cは理論値で、実測された値と推定した値の差(残差)をプロットしてあります。軌道がうまく推定されればこの値はゼロになり、そうでないとゼロから離れた値になってしまうだけの図で、まったく面白くない図です。しかし、このO-Cこそが最終的には、例えば惑星探査機が目的地に到着できるかどうかの鍵を握っていることになります。
ここでは、このO-Cを利用して面白い図をつくってみました。それは、火星探査機「のぞみ」(1998~2003年)と小惑星探査機「はやぶさ」(2003~2010年)について、打上げからミッション終了までの全期間にわたるO-Cの図です。ここでのO-Cは、レンジレートから換算した視線方向の速度についてのものです。O-Cですから、軌道がきちんと推定されれば値はゼロになるだけで面白くない図になってしまいますが、ここでは最終的なO-Cではなく、ちょっと特殊なO-Cにしてみました。すると、探査機がどのような状況にあったのかが見えてきます。
「のぞみ」の場合、地球周回軌道から惑星間軌道に出てしばらくは平穏な運用が続き、その間「合」を体験し、そして電波が途絶え、復活し、自律機能を使って厳しい運用をしていた......という波瀾万丈なミッションが見えてきます。「はやぶさ」では、イオンエンジンによる軌道制御を頑張っていて、小惑星に到着・滞在、トラブルが発生し通信が途絶え、復活、復旧運用がありしばらくは平穏な運用、そして地球帰還に至る、ということになります。ゼロのまわりの数値の変動で探査機の状況(探査機がどのように頑張っていたか)が分かるわけです。このように軌道決定グループは、探査機が打ち上がると常に軌道を通して探査機の様子を、まるで我が子のように見守っているのです。
さて、どのようにして探査機の軌道を推定するのかという質問をよく受けます。基本は、レンジ(地上局と探査機との間の距離)とレンジレート(視線方向の速度)の観測値を使って、探査機の位置と速度を割り出していくことになります。具体的な説明には少し誌面が必要なのでまた別の機会に譲りたいと思いますが、最近では、新たな手法としてDDOR(Delta Differential One-way Range)と呼ばれるものを導入したりして、軌道決定の精度を1~2桁向上することも行っています。
ミッションにおいては、超裏方の軌道決定グループですが、今日もO-Cを見ながら探査機の状況を見守っています。
(よしかわ・まこと)
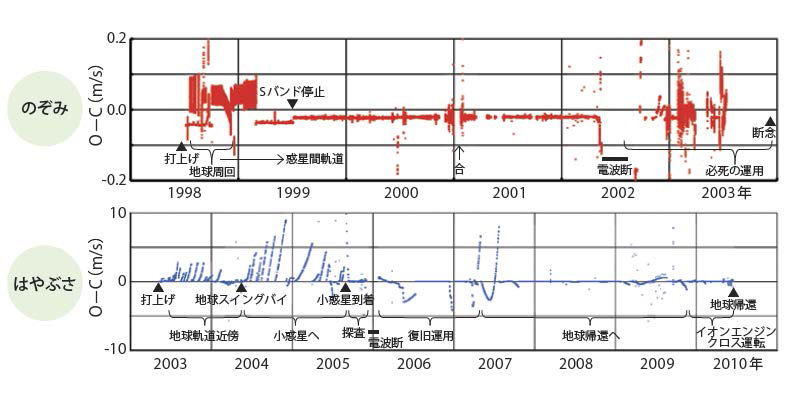
ミッション全期間にわたるO-C
火星探査機「のぞみ」と小惑星探査機「はやぶさ」の視線方向の速度(レンジレートから換算)についてのO-Cを示す。ここでのO-Cは、ミッションの状況が分かるようにしたもので、例えばバイアスを除去していなかったり、イオンエンジンの推力推定を行っていなかったりするものである。O-Cの値そのものより、振る舞いの仕方を見てほしい。
ISASニュース 2015年10月 No.415掲載