
リンゴを手から離せば、地面に向かって真っ直ぐ落ちる。地球上に住む我々にとっては、至極当然のことである。しかし、この常識が必ずしも当てはまらない世界がある。イトカワやリュウグウなどの小惑星である。本稿では、小惑星の特異な力学的環境と、それに起因する小惑星探査の難しさについて、「はやぶさ2」を題材にした筆者の研究を交えながら紹介する。
小惑星近傍でのリンゴの軌道
リンゴは地球の中心に向かって落下し、人工衛星は地球の周りで円や楕円の軌道を描く。いずれも地球重力の作用によるものである。このようなリンゴや人工衛星の振る舞いは、多くの人にとっては常識と言えよう。ところが、リンゴや探査機を小惑星に持っていくと不思議なことが起こる。リンゴは小惑星の中心方向から逸れて落下し、探査機は図1のような奇妙な軌道を描く。これは、小惑星の重力が小さいために様々な外乱が生じ、物体の運動が影響を受けるためである。
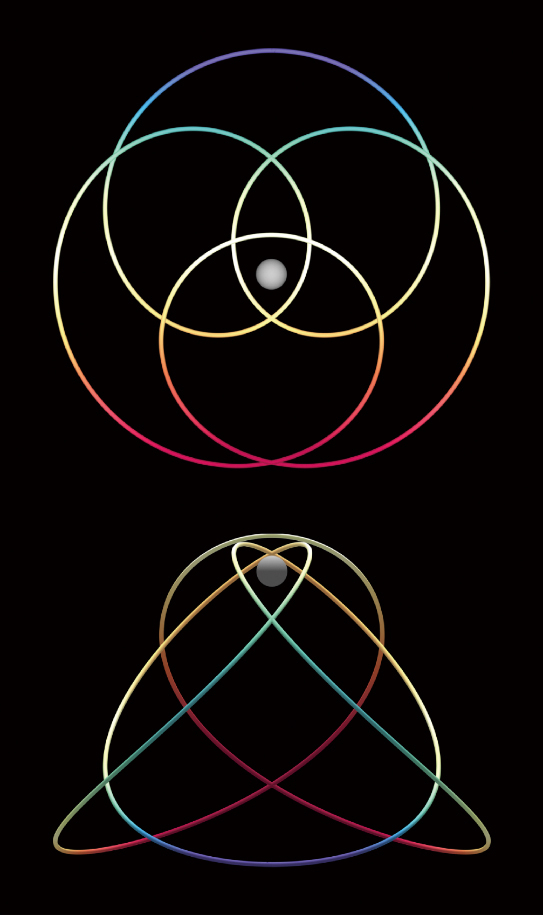
図1 「はやぶさ2」のリュウグウ周回軌道の例。実用された軌道ではないが、理論上は実現可能な軌道。太陽から見た図(上)と、リュウグウ公転軌道面に垂直な方向から見た図(下)。
主要な外乱は2つ。まず1つ目は太陽光圧である。太陽光圧とは、探査機表面に太陽光が当たることで物理的に生じる圧力のことを指す。と聞いても、恐らく普段から宇宙を扱っていない限りピンと来ないのではなかろうか。それもそのはず、この太陽光圧は地上では気付かないほど弱い。地上で「太陽の光に押されている」と感じる人はいないであろう。もしいれば、それは気のせいか、あるいは驚異のセンシング能力である。地上において、人に作用する太陽光圧による力は、重力の約1億分の1以下である*1 。ところが、舞台を小惑星に移すと状況は一変する。小惑星重力が微小であるが故に、太陽光圧は相対的に大きな力となり、探査機の軌道を強く乱す。実際に、「はやぶさ2」が滞在していたホームポジション(リュウグウ上空の高度20 km)では、太陽光圧による力とリュウグウの重力とがほぼ同じ大きさであった。
小惑星周りの軌道に対する2つ目の外乱は、小惑星重力の偏りである。惑星や月などの大型天体は、自身の重力の作用によってほぼ球状に形成されている。逆に、小惑星は重力が弱いため、一般に歪んだ形をしている。例えば、「はやぶさ」が訪れたイトカワは、ピーナッツの様な形をしているし、「はやぶさ2」の探査対象であるリュウグウは、表紙左図の様にそろばんの珠を想起させる外観である。天体形状が歪だと天体の質量分布も球対称ではなくなるため、天体が周囲に及ぼす重力に空間的な偏りが生じる。この影響で、小惑星重心から等距離であっても重力の大きさが異なったり、重力の向きが小惑星重心方向からずれたりする。具体例として、リュウグウの表面重力分布の計算結果を表紙右図に示す。リュウグウは赤道部分が張り出しているため、赤道付近に質量が集まっている。その結果、図が示す通り、リュウグウの赤道付近では、通常より(完全な球である場合より)も20%ほど強く重力が作用する[1]。
強摂動環境における軌道力学
上述の通り、太陽光圧や重力の偏りなどの効果*2 によって、小惑星近傍での探査機の軌道運動は強く乱される。この軌道運動の乱れのことを、軌道力学の分野では「摂動」と呼ぶ。よって、小惑星近傍の力学的環境は、しばしば「強摂動環境」と称される。小惑星近傍の強摂動環境は、小惑星探査にとって厄介な障壁である。小惑星に滞在して観測を行い、ローバーを分離し、また着陸する、といった運用全てが外乱の影響を受ける。それ故に、小惑星探査の動向が世界的に活発化すると共に、強摂動環境における軌道力学の研究も発展してきた。
17世紀にケプラーやニュートンらによって礎が築かれた軌道力学の分野にあって、小惑星近傍での軌道運動を扱う研究が体系化されてきたのは極最近と言える。例えば、図1のような特殊な小惑星周回軌道の存在が広く知られるようになったのは、筆者の知る限り過去10年余りのことである。筆者がこの分野の研究をし始めたのは2013年のことだが、以来毎年多くの新しい軌道力学理論を目にしている。その研究対象は、複雑な重力環境をもつ二重小惑星周りでの探査機軌道や、微小重力下でのローバーや着陸機の運動、重力場を精緻かつ高速にシミュレートする数値計算アルゴリズム、など多岐にわたる。そこで以下では、強摂動環境における軌道力学の最新研究の一端を、実ミッションを例にとって、「小惑星近傍での軌道維持」、「小惑星への着陸」という2つの観点で眺めてみる。
小惑星近傍での軌道維持
詳細な探査を行うためには、探査対象の天体に留まらねばならない。しかし、「ただ滞在する」ことが、小惑星では存外難しいことは先述の通りである。地球などの大型天体の周りでは、十分な速度さえ与えれば、宇宙機はほぼ一定の円・楕円軌道を描き続ける。対照的に、小惑星近傍では、探査機が滞在する高度域において、主に太陽光圧による摂動が強く顕れる。そのため、容易に小惑星からの離脱や小惑星への衝突という結果に至ってしまう。では、どうするか?解決策は2つに大別される。
1つ目の解決策は、「はやぶさ」・「はやぶさ2」で採用された、ホバリングと呼ばれる手法である。小惑星重力や太陽光圧を相殺するように、定期的にエンジン噴射を行うことで、小惑星上空での位置を保持する戦略だ。原理はシンプルで実用性も高い*3 。実際に、「はやぶさ2」ではホームポジションでのホバリング運用を起点として、着陸やローバー分離、インパクタ実験などの多くのミッションを成功させた。一方で、高頻度のエンジン噴射による燃料浪費がホバリングの短所である。
2つ目の解決策は、「上手く軌道を選ぶ」という戦略で、海外の小惑星探査機で採用されている。軌道力学の研究を通じて、特殊な条件下で成立する安定な周期軌道の存在が知られている。代表的なものが、ターミネータ軌道と呼ばれる極軌道や、図1の共鳴軌道である。ターミネータ軌道は、NASAのOSIRIS-RExミッションで採用されており、その有用性は今まさに小惑星ベンヌでの探査を通じて実証されている[3]。軌道に摂動が生じないように探査機の位置・速度条件が上手く設計されており、理論上は放っておいても同じ軌道を描き続ける。しかし、安定な周期軌道は、太陽方向に対して軌道面が垂直でなければならないなど、限定的な条件でしか得らないため、軌道設計の自由度が低いことが難点である。
ホバリング運用と周回運用は、いずれも確立された手法だが一長一短がある。そこで、筆者らの最近の研究では、両者の折衷案として、周回しながら定期的なエンジン噴射を行う人工的な周期軌道を考案した[4]。研究の結果、1周に1回の制御で、図2のようなハート軌道と涙滴軌道が得られることがわかった。周回の遠心力で重力を相殺するため所要燃料はホバリングより少なく、また従来の周回軌道より設計自由度が高い。周期的な制御を自然運動の一部として扱うことで、従来の力学理論を拡張した安定性の解析などを行った。解析結果の一例を図2の下部に示す。軌道速度と傾斜角が異なる涙滴軌道群の安定性マップである。ここでは敢えて詳細な解説を避けるが、小惑星近傍の複雑な力学系が生み出す、軌道解構造の芸術性(?)を感じて頂ければ幸いである。この新たな軌道の有用性を鑑みて、「はやぶさ2」運用のオプションとして、涙滴軌道によるリュウグウ周回が実際に検討された。残念ながら実現には至らなかったが、「小惑星に滞在する」という最も基本的な運用に対する新たな選択肢を獲得した点では進歩である。今後のミッションで、小惑星探査機が涙滴軌道やハート軌道を描く日が来ることを期待したい。
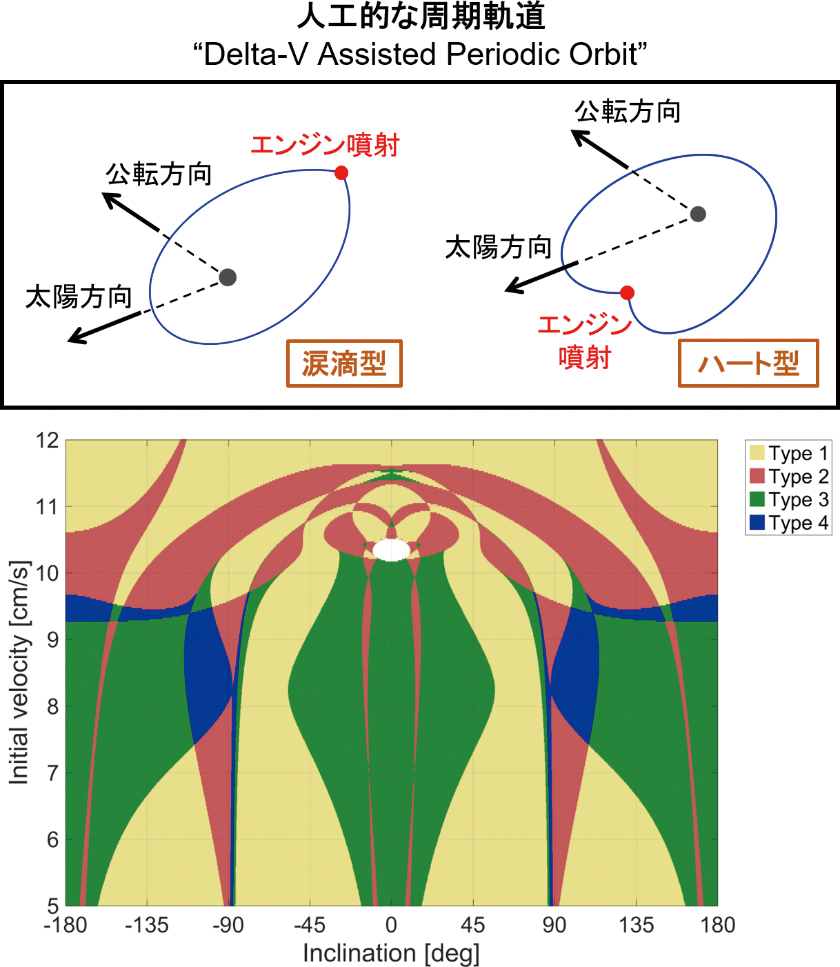
図2 小惑星近傍での人工的な周期軌道とその軌道群の固有構造。下の図は、初期位置を5kmに固定し、軌道傾斜角(横軸)と初期速度(縦軸)を変化させた場合の涙滴軌道群の安定性タイプを表す。各軌道の安定性に関連する6次元の固有値に基づき、軌道を4つのタイプに分類している。"Type 4"が最も安定な軌道に対応する。
小惑星への着陸
ここからはもう少し高度を下げて、小惑星表面付近での軌道運動に関する研究を紹介する。「はやぶさ2」ミッションでは、リュウグウ到着後の観測で、予想以上に多量の岩塊が分布していることが判明した。安全に着陸するためには、探査機に衝突する危険性のある岩を避ける必要があり、最終的には半径わずか3mの着陸点が選定された*4 。「はやぶさ2」の全幅は6mなので、「半身」以内のずれに収める必要がある。小惑星上空から表面に近づいていくと、太陽光圧に替わって重力の偏りの影響が顕著になり、小惑星表面への物体投下や着陸の精度を低下させてしまう。「はやぶさ2」の例では、着陸時のわずかな誤差が命取りになる。したがって、強摂動環境下での高精度着陸の実現が、「はやぶさ2」着陸運用の最大の課題であった。そこで、リュウグウ到着後に新たに練られた最終着陸シーケンスが、「事前投下したターゲットマーカー(人工的な目印)を追尾して最終降下点に精密に誘導し、その点から着陸エリアに自由落下する。」というものであった。
表紙右図に示したリュウグウの重力場の解析に基づき、重力の偏りによる摂動を加味した着陸軌道が設計された。この軌道は、目標点に正確に着陸するばかりでなく、接地速度や接地角などの工学的条件を満たすように設計されている。また、現実の運用では、センサ測定誤差や、エンジン噴射誤差に起因する探査機の位置・速度誤差が生じる。種々の誤差が生じても安全に着陸できることを担保するために、筆者らの研究では、「はやぶさ2」の着陸分散(着陸位置のばらつき)も合わせて解析した。図3(右)は、着陸軌道を10万ケースで数値シミュレーションして、着陸分散を求めた結果である[1]。この解析の結果、目標エリアに着陸分散が収まっており、着陸軌道が十分安全であることが確認された。
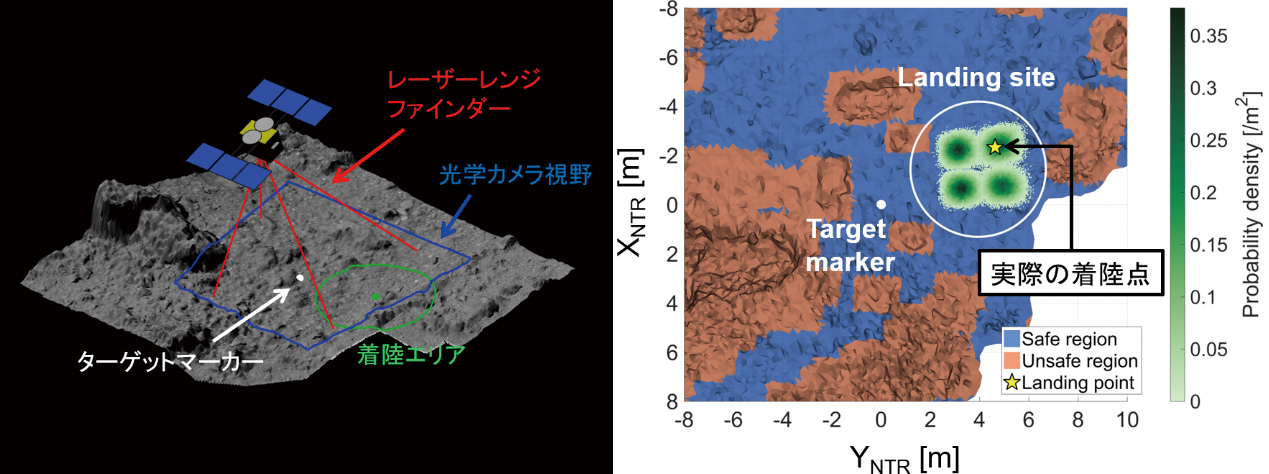
図3 「はやぶさ2」の着陸シミュレーションの例(左)と着陸分散(右)。半径3 mの非常に狭い安全エリアへの着陸が要求された。右図の濃い緑色の点群は着陸確率の高い領域であり、「はやぶさ2」制御系の特性によって四方に分かれている。
斯くして、2019年2月に、「はやぶさ2」はリュウグウへの着陸を見事に成功させた。運用後の軌道復元の結果、図3(右)の通り、「はやぶさ2」が予測された分散エリア内に着陸し、着陸誤差がわずか1mであったことが明らかとなった。また、ここまでに述べたのは、1回目の着陸運用についての研究成果であるが、「はやぶさ2」は2019年7月に2度目の着陸も成功させている。2回目の着陸誤差は約60cmであり、高精度着陸の再現性が実証された。
おわりに
小惑星近傍の強摂動環境における軌道力学は、未だ発展途上であり、多くの興味深い性質を秘めた研究分野だと感じる。例えば、本稿では割愛したが、小惑星近傍では探査機の軌道運動と姿勢運動が互いに強く影響を及ぼしあう現象も顕れる[6]。小惑星探査を行う上で、小惑星近傍での物体の運動を理解することは、最も根源的な活動と言える。惑星科学上の意義に留まらず、鉱物資源の宇宙利用や地球への隕石衝突防止の観点でも、小惑星探査の重要性は増していくであろう。小惑星探査の需要の高まりと共に、軌道力学論の新たな側面を垣間見ることが楽しみである。最後に、本稿執筆の契機となった研究を支援して頂いた、はやぶさ2、IKAROS、OKEANOSプロジェクトの皆様に、この場を借りて感謝申し上げる。特に、川口淳一郎教授と津田雄一教授という2人の偉大な師の指導を賜ったことは、筆者の研究者人生の中で最も幸運な出来事であり、厚く御礼を申し上げたい。
*1 身長170cm・横幅40cmの長方形型断面と質量70kgを有するヒトが、地上で仰向けになって真上から日光を浴びる場合、太陽光圧による加速度は約4.4×10-8 m/s2である(ただし、大気等による太陽光の減衰を無視)。これは重力加速度9.8m/s2の1億分の1以下である。
*2 その他の外乱としては、太陽重力と熱輻射圧が挙げられ、彗星の場合にはプルームによる推力も加わる。
*3 シンプルな原理とは裏腹に、小惑星近傍でのホバリングの力学理論もまた奥深く、運動の安定性等に着目した研究が、21世紀に入ってから多く発表されている[2]。
*4 着陸点選定においても、苛烈なリュウグウ環境を克服するために、はやぶさ2理学・工学チームの知識と知恵の粋が結集された。その紆余曲折の一端は、筆者の他の解説記事[5]を参照されたい。
参考文献
[1] S. Kikuchi, F. Terui, N. Ogawa, T. Saiki, G. Ono, K. Yoshikawa, Y. Takei, Y. Mimasu, H. Ikeda, H. Sawada, S. Van Wal, S. Sugita, S. Watanabe, and Y. Tsuda, "Design and Reconstruction of the Hayabusa2 Precision Landing on Ryugu," Journal of Spacecraft and Rockets, 2020(. in press)
[2] S. B. Broschart and D. J. Scheeres, "Control of hovering spacecraft near small bodies: application to asteroid 25143 Itokawa," Journal of Guidance, Control, and Dynamics, Vol. 28 , No. 2 , pp. 343 - 354 , 2005 .
[3] D. R. Wibben, A. Levine, S. Rieger, J. V. McAdams, P. G. Antreasian, J. M. Leonard, M. C. Moreau, and D. S. Lauretta, "OSIRIS-REx Frozen Orbit Design and Flight Experience," AAS/AIAA Astrodynamics Specialist Conference, Portland, Maine, 2019 .
[4] S. Kikuchi, Y. Tsuda, and J. Kawaguchi, "Delta-V Assisted Periodic Orbits around Small Bodies," Journal of Guidance, Control, and Dynamics, Vol. 40 , No. 1, pp. 150 -163 , 2017 .
[5] 菊地翔太,「火の鳥「はやぶさ」未来編 その18 ~ はやぶさ 2 の高精度タッチダウンの裏側~」,日本惑星科学会誌遊星人,Vol. 28 , No. 2 , pp. 143 -149 , 2019 .
[6] S. Kikuchi, K. C. Howell, Y. Tsuda, and J. Kawaguchi, "Orbit-Attitude Coupled Motion around Small Bodies: Sun-Synchronous Orbits with Sun-Tracking Attitude Motion," Acta Astronautica, Vol. 140 , pp. 34 - 48 , 2017 .
【 ISASニュース 2020年6月号(No.471) 掲載】