
はじめに
生き物の体を支える脚は、その生態に応じて実に多彩な形をしています。生物は専門ではありませんが、象の脚、ネズミの脚、こうもりの脚、バッタの脚、海中生活に対応して外見から見えなくなってしまったクジラの脚まで、それぞれが自身の生活環境に非常にうまく適応した形と仕組みを持っているように思います。同様に探査機の脚である着陸機構も、そのミッションライフが仕組みと形に強く反映されます。今回は1本の主脚と4本の補助脚という一風変わった外観に落ち着いたSLIMの着陸機構ついて、その概要を簡単に紹介します。
改めて「SLIM」とは、Smart Lander for Investigating Moonの略で、JAXA宇宙科学研究所にて進められている月着陸実証機の開発プロジェクトとその機体の名前を指します。SLIMプロジェクトの主な目的は、高精度な着陸技術(ピンポイント着陸)の実証と、低リソースの小型探査機により今後の月着陸科学探査を高頻度化するための技術獲得です。SLIMの着陸機構も常にこのミッションの達成を念頭に開発が進められています。
SLIMの着陸方式
早速着陸機構のハードウェアの紹介...、に移る前に、まずSLIMがどのような手順で月面に降り立つか、について概要を示します。ピンポイント着陸のため着陸点直上まで接近したSLIMは「2段階着陸」と呼ぶ新しい着陸手順により着陸します。この手法の大まかな流れは図1に示す通りです。着陸点直上まで来たSLIMは、画像認識した地面上の障害物を回避しながら着陸点上約3m程度のところまで垂直に降下します(図1(1))。次にそのまま姿勢を前に倒しつつ高度を落としていきます(図1(2))。その後、姿勢を前傾させつつ降下を続けることで降下姿勢において最も下部にある主脚が初めに月面に接地します(図1(3))。(3)の時点で接地前に姿勢を前に倒すと主エンジンである軌道変更用エンジンが傾いて必然的に前進速度が出るのですが、主脚の月面接地後もその勢いのまま前方向に姿勢を回転させます(図1(4))。最後に最も高い位置にある前補助脚が接地したところで姿勢を静定させ2段階着陸による着陸タッチダウンが完了します(図1(5))。主脚が接地する1段階目と、機体側面の補助脚が接地する2段階目の接地タイミングがあることから2段階着陸、と呼ばれています。
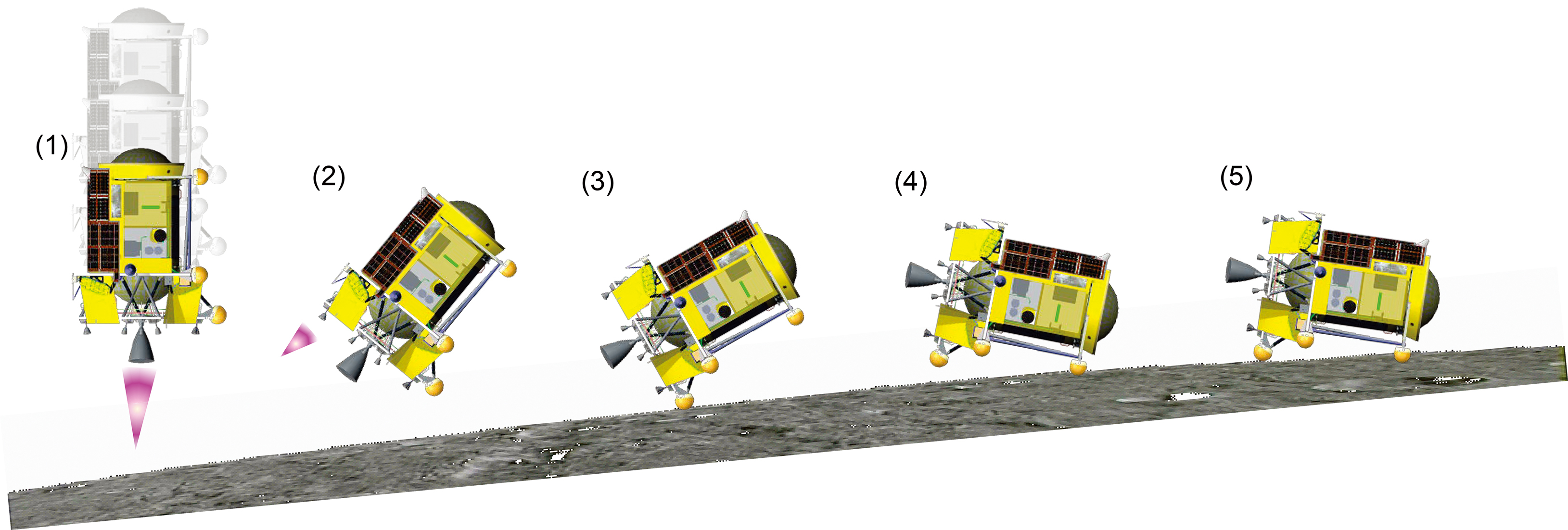
図1 2段階着陸
この2段階着陸という手順は特にSLIMのような低リソースでの着陸を目指す機体にとって大きく4つの利点があります。1つ目の利点は、機体から大きく張り出した脚構造が必要ないため脚の構造が非常に簡素で軽量化できることです。重力天体への着陸、という作業は打上げの逆回しのようなものであり、着陸を行う探査機は簡単に言うと2回分の打上げを経験することにあたります。従って衛星や着陸を行わない探査機以上に質量軽減は非常に重要な課題であり、この点は大きな利点です。2つ目の利点は最初に月面と接触して大荷重を受ける脚を限定できることです。複数の等しく張り出した脚があると、どの脚が最初に当たるか特定できないためにすべて等しい強度を持つ必要がありますが、2段階着陸においては最初に接触する脚が確定しているため、それ以外の脚と識別して荷重条件を設定することができます。これも機体の軽量化に繋がります。3つ目の利点は、2段階着陸の最終的な着陸姿勢が横転状態であることから垂直降下時の月面側の脚構造を最小化することができることです。着陸時に月面側となる機体面は軌道変更用のエンジン(OME)、補助スラスター(RCS)、航法カメラ、着陸用のレーダー、レーザー高度計など多数の機器を配置する必要がありますが、これらと着陸脚との空間的な干渉を最小限にすることができます。これは探査機システムを検討する上で大きな利点です。最後の利点は、特にSLIMに向けたもので2段階着陸は突入方向を斜面山側に合わせることで斜面における転倒リスクをより大きく減らすことができます。この特徴は傾斜のある荒地を目指すSLIMにとってとても効果的です。
SLIMの着陸機構
前置きが長くなりましたが、いよいよ本題であるSLIMの着陸機構を紹介したいと思います。ただしこれまでに述べた通り、SLIMは全機で転がるように着陸することから「着陸機構」として分類される個別の部品は実のところ多くありません。最新のSLIMの外観形状を図2に示します。2段階着陸を実現するため、SLIMには主脚として機体下部軌道変更用エンジン側に一つ、横転後に機体を支える2段階目の補助脚として機体中段のデッキパネルに2脚、と機体上部、ロケット結合リング近傍の前補助脚が2脚で合計5脚が配置されています。なお、機体中段のデッキについているデッキ脚については少し主脚-前補助脚の作る面から窪んでおり、横速度によってロール回転した際に踏ん張って横転を止める役割を持ちます。
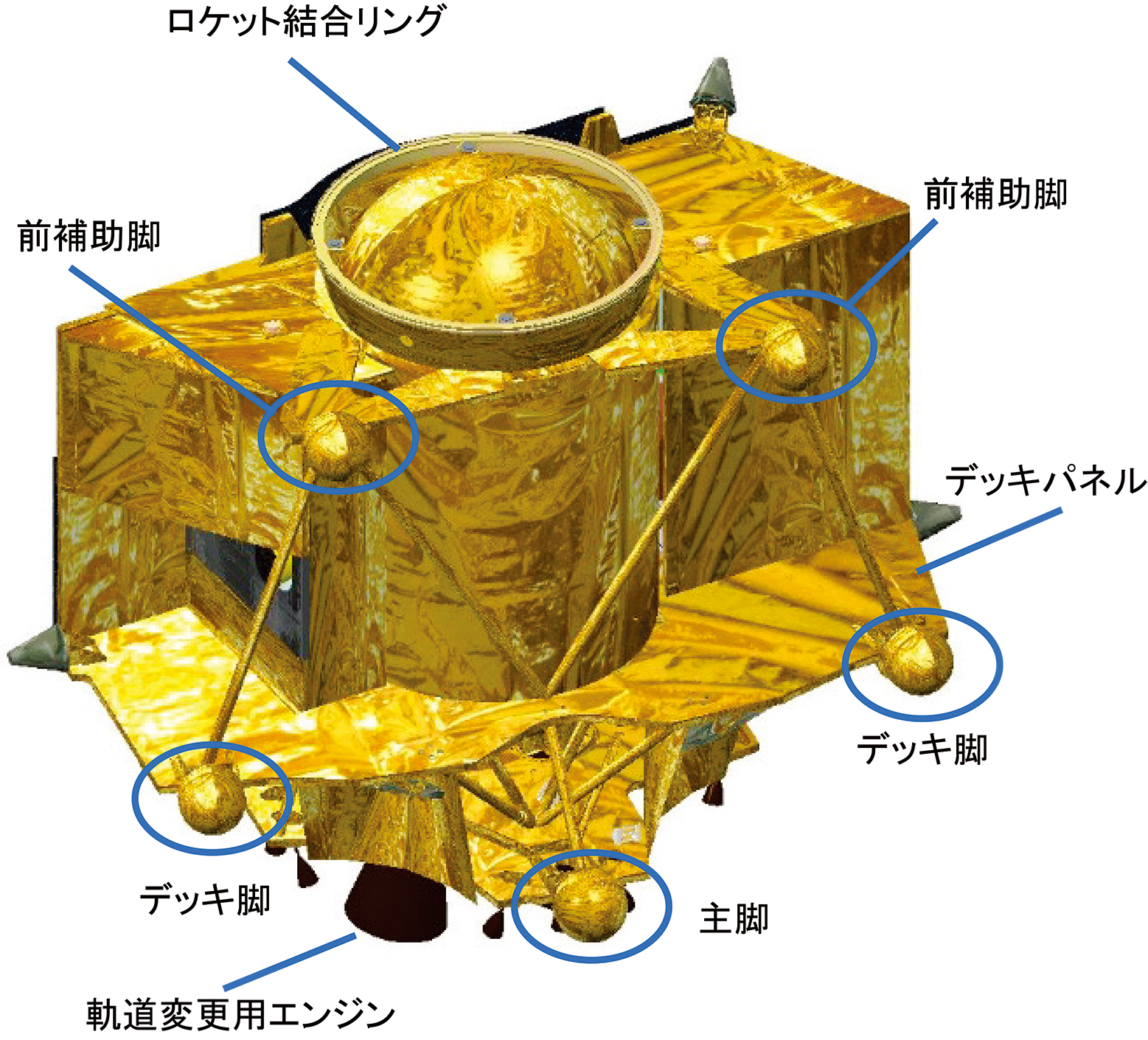
図2 SLIMの外観形状と機器配置
これらの「脚」は金属積層造形装置(いわゆる金属の3Dプリンター)で造形した3次元の金属格子の衝撃吸収材とそれを支える背面構造、熱的に保護する熱制御材から構成されています。各月面との接触点に配置された「脚」の衝撃吸収材が月面に接触する際に潰れることで運動エネルギーを消費し、接触時の荷重を規定以下に抑え確実な着陸を実現します。従来、こうした自身が破壊することによって運動エネルギーを消費し衝撃を抑える機構にはアルミニウム箔製のハニカムコアが多く使われていました。アルミハニカムは潰れる際の反力の特性がよく調達が容易などの利点があるのですが、構造の異方性のため1方向からの荷重にしか対応できません。一方、今回SLIMで新たに採用した積層造形によって作製された異方性の少ない金属の格子構造による衝撃吸収材は、様々な方向からの衝撃力を等しく吸収することができます。このことが直接衝撃吸収材を接触点に配置するだけ、という非常に単純かつ軽量で信頼性の高いSLIMの「脚」の実現に繋がりました。
衝撃吸収材が潰れた際に機体に与える反力は衝撃吸収材の圧縮変形応力と潰れ面の断面積の掛け算によって決まります。エネルギーは力の作用した距離の積分値ですので、衝撃吸収材が吸収するエネルギーは先ほどの反力を吸収材が潰れた距離だけ積分した値となります。衝撃吸収材が吸収できる最大の運動エネルギーは衝撃吸収材が想定通り潰れることができる最大ストロークまで潰れた際の吸収エネルギーです。従って反力を下げつつ最大吸収エネルギーを大きくするためには、なるべくストロークを大きくし、圧縮変形応力を小さくすることが基本となります。ただし、ストロークとしてとれる長さにも重量や他のサブシステムとの干渉(視野干渉)などによる限界があります。必要な最大吸収エネルギーは接地直前の挙動と速度の制御精度によって決まりますので、着陸システム担当とGNC(Guidance Navigation Control 航法誘導制御系)担当との間では現在の設計に至るまでに何度も調整が行われました。この際には、格子構造を構成する梁の太さや気孔の割合から反力やストロークの微調整が容易、という積層造形による衝撃吸収材の利点が大いに生かされています。また、設計と同時に衝撃吸収材が想定通りに作動するか、についても様々な条件にて実際にSLIM相当の錘付きの衝撃吸収材を落下させて検証が行われました。図3は潰れる前の衝撃吸収材と、実際に衝撃吸収材が潰れていく瞬間を示しています。
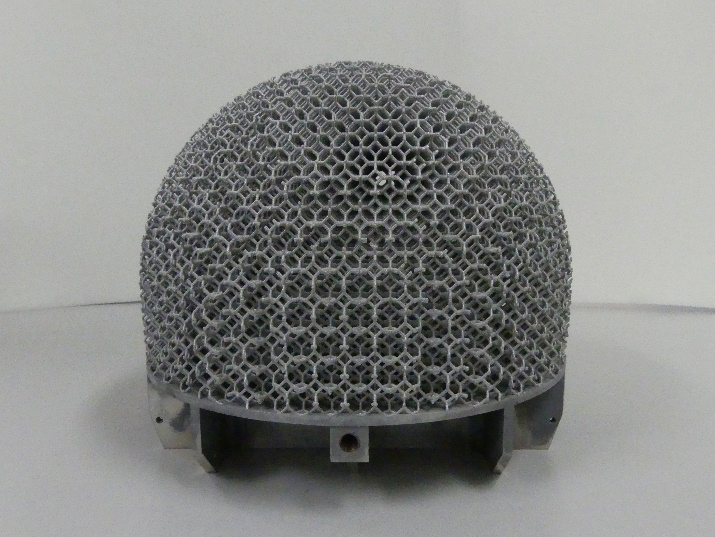
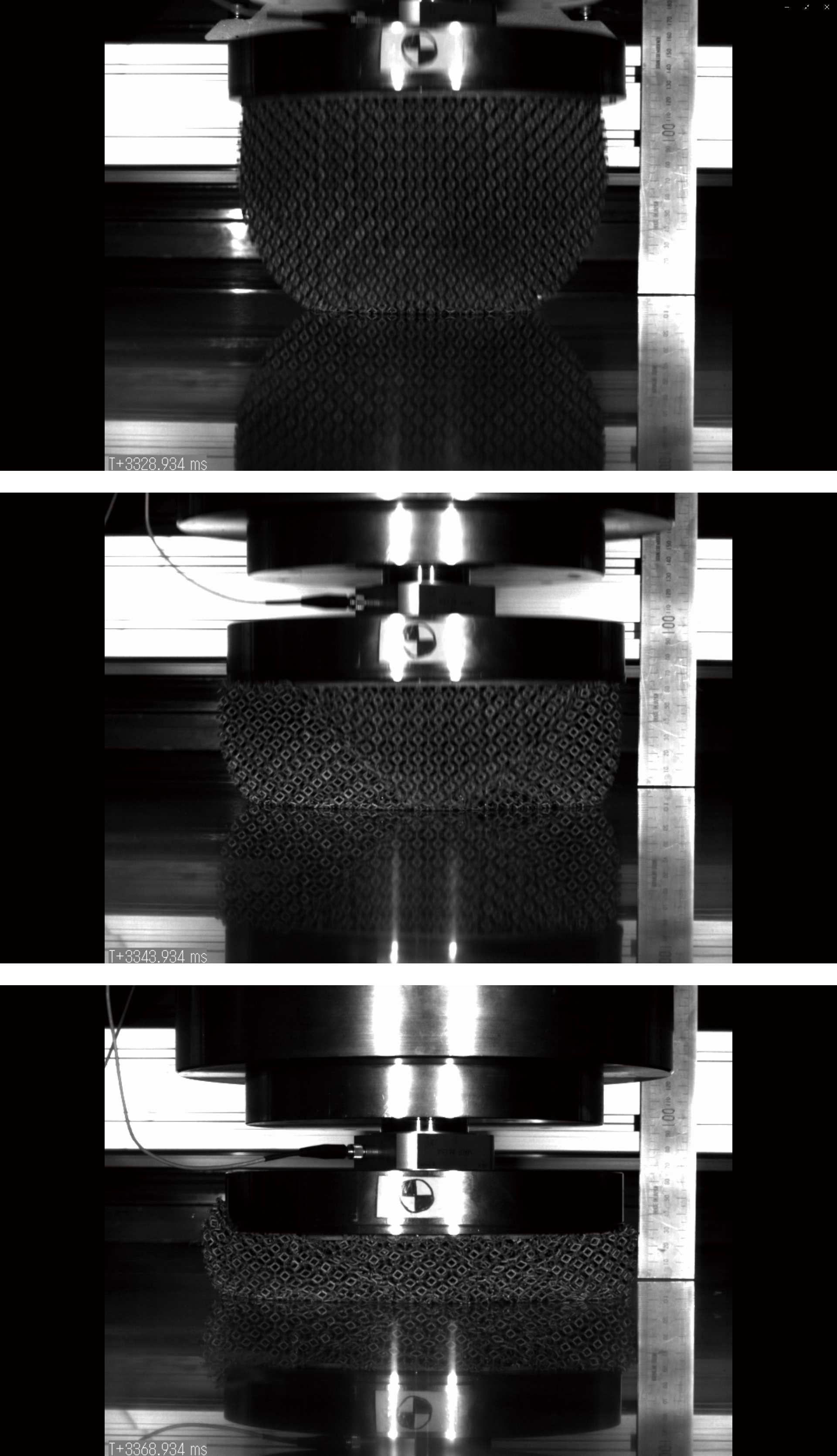
図3 衝撃吸収材(上)と衝撃吸収材が潰れる瞬間(下)
SLIMのうち純粋に「着陸機構」と呼べるような部品は実はこの衝撃吸収材の「脚」のみです。SLIMの2段階着陸では機体全体を横転させて着陸しますので、あとはいかにうまく着陸脚を配置するかが、着陸の成否を決めます。この着陸脚の配置は、タッチダウンのシミュレーションを用いて最適化されました。
シミュレーションを行うにあたり、はじめにシミュレーション開始時の探査機と地面の状態を推定する必要がありますが、これには数多くの要素があります。着陸直前の姿勢や速度が代表的ですが、残推薬量の違いによる機体の質量特性や重心位置変動なども考慮する必要があります。また、着陸点の状態についても多くの不確定性があります。斜面の方向や斜度、ボルダー(岩)の配置、斜面の状態(岩盤か岩場か砂地か)などです。こうした多くの条件と着陸脚の配置が着陸に対してどのような影響をもたらすかは、独立な場合もありますが複合的な場合(地面の傾き具合によって横転しない接地速度が変わる等)もあります。この多数の条件の複合に対応するため、脚の数と配置の検討は着陸シミュレーションにモンテカルロ法を組み合わせて行いました。具体的にはいくつかの脚配置について着陸条件をランダムに設定した着陸シミュレーションの数千ケースを1セットとして繰り返し実施し、そこからどのような脚配置の時に着陸が成功しやすくなるか、成功ケース、失敗ケースをそれぞれ抽出して特定の条件に対する着陸への感度を確認しました。現在の主脚、デッキ脚、補助脚の配置や個数は主にこのシミュレーションの結果から最も広い範囲の初期状態で安定して着陸が成功する配置となっています。SLIMの特徴的な1本足の主脚も、最初に地面と接触する主脚が機体の中心からずれていると残留速度によって機体に回転運動が生じ転倒に至りやすい傾向がシミュレーションによる試行の中で見いだされたことによるものです。
加えて着陸機構は着陸の最後の瞬間のためにあるものですが、月面にたどり着くためにはミッション全期間にわたって他の機器と共存しなければなりません。特に主脚は軌道変更用エンジンや姿勢制御スラスターに近く、それらの噴流からの熱入力は重要な検討項目でした。衝撃吸収材の材料であるアルミは高温になると柔らかくなるため設計通りの衝撃吸収性能が発揮できません。こうした点に対応するため、着陸時の噴流の流れの数値解析を行い各部の入熱量が許容可能な値となるように主脚の配置や熱制御材の厚みを調整しています。図2において主脚がパネルの陰で軌道変更用エンジンから見えにくい位置関係にあるのは、安定した着陸を実現できる脚配置という観点に加えて、実はこの噴流の影響を回避する意図が含まれています。
さいごに
今回は紙面の都合もあり着陸機構とその検討の本当に主要な点のみをご紹介しましたが、実際のところそれ以外にも様々な探査機システムやミッションの制約条件からSLIMの着陸機構は検討されています。よく見ると若干傾いている各衝撃吸収材の取り付け角度や、各脚のタンクからの張り出し量、各脚に対する電子機器類の搭載位置関係にも実は着陸機構と関わる理由があります。もし今後SLIMの模型等をご覧になる機会があれば、そのあたりを推測いただけると楽しいかもしれません。SLIMは2021年度の打上げに向けて現在コンポーネントレベルから開発の終盤である詳細設計審査(CDR)を受審するフェーズに入りました。高精度誘導の実現と確かな着陸に向けて開発を進めたいと考えておりますので、引き続きご支援の程、どうかよろしくお願い致します。
【 ISASニュース 2019年12月号(No.465) 掲載】