
はじめに
1990年代後半あたりに端を発する超小型衛星は、特にここ数年の宇宙ベンチャーの隆盛も相まって、爆発的に増えてきています。米国のユタ州立大学で毎年開催されている小型・超小型衛星に関する世界最大の国際会議「Annual AIAA/USU Conference on Small Satellite」には、今年は政府機関も含む約800の組織・機関から約2,500名が参加し、約200社の企業がブースを出展しており、その活況ぶりが窺えます。
世界初のCubeSatは、筆者も開発に携わった2003年の東京大学・東京工業大学らによる1U CubeSatの打上げでした※1。そのエポックメイキングな成功から16年後の2019年に、13機のCubeSatが、地球周回軌道を飛び出し、深宇宙探査に乗り出そうとしています。本稿では、そのうちの1機であるエクレウス(EQUULEUS: EQUilibriUm Lunar-Earth point 6U Spacecraft)という地球―月ラグランジュ点探査ミッションの概要と、それを通じたCubeSatによる深宇宙探査ミッション実現への筆者らの取組みの一端を紹介します。
千載一遇の打上げチャンス
NASAが開発している次世代ロケットSLS (Space Launch System)は、将来的には小惑星や火星への有人飛行への利用が検討されている大型ロケットです。SLSの初号機は月フライバイ軌道へ有人宇宙船の試験機を打ち上げる予定ですが、月以遠に飛行する貴重な深宇宙打上げ機会の余剰重量を有効活用するため、13機の6U CubeSat(約10×20×30cm)が相乗りで打ち上げられることになりました。NASAのJPL、Marshall、Ames、Goddardの各フィールドセンターや米国内の大学・企業等が威信をかけて小惑星フライバイや月の極域探査などの野心的なミッションを提案する中、「将来の有人宇宙探査に貢献するミッションであること」を前提に、相乗りスロットがJAXAを含む国際パートナーにも割り当てられることになりました。JAXAからは、EQUULEUSと、おもてなし(OMOTENASHI :Outstanding MOon exploration TEchnologies demonstrated by NAno Semi-Hard Impactor)の2機のCubeSatが相乗りスロットを獲得しました。
東京大学は、JAXAと共同で開発したPROCYON(「はやぶさ2」に相乗り)により世界で初めて50kg級の超小型深宇宙探査機バス技術の実証に成功しました。PROCYONよりもさらに小さな深宇宙探査機の実現を目指すEQUULEUS は、再びJAXAと東京大学の共同開発体制で開発することとなり、2016年にプロジェクトがスタートしました。
工学ミッション:太陽―地球―月圏での軌道操作技術の実証
EQUULEUSの主ミッションは、太陽―地球―月圏における軌道制御技術の実証です。太陽や月の重力を利用することにより、リソース制約の厳しいCubeSatでも実現可能な軌道変換能力で地球―月系のラグランジュ点(地球から見て月の裏側のL2点。以下、EML2)へ効率的に航行することを目指しています。EQUULEUSは、図1に示すような軌道でEML2周りの周期軌道へ航行する計画です。ロケットから分離され月フライバイ軌道へ投入されたあと、小さな速度変化(低ΔV)により約1週間後の月フライバイ時の近月点(月の中心からの距離が最も近い点)を調整し、フライバイ後に月に再会合できる軌道へ遷移します。その後、約6カ月をかけ、複数回の月スイングバイ(月の重力を使った軌道変更)を経由してEML2周りの周期軌道へ到達して後述する各種科学観測を実施する計画です。

図1 EQUULEUSの軌道設計例
軌道決定誤差等の様々な誤差要因を考慮しても、一般的な月・深宇宙ミッションと比較して極めて小さい70m/s程度のΔV能力でミッションが成立しています。約6カ月という長い飛行時間が必要になるかわりに、月スイングバイを複数回実施することにより探査機自身の推進能力を節約することが可能なのです。
このような月スイングバイを活用した低ΔV航行技術の獲得は、超小型衛星が効率的に太陽―地球―月圏を航行するためには当然必要不可欠ではありますが、その意義は超小型衛星にとどまりません。将来の月やそのラグランジュ点近傍に設置されることが期待されている深宇宙港へのアクセスをより効率的にする(例えば、貨物輸送機の貨物重量を増やすことができる)点でも、大きな意義があると考えられます。
3つの科学観測ミッション
EQUULEUSは3つの科学観測ミッションを実施する計画です。1つめは、地球の磁気圏プラズマの全体像を地球から離れた距離から極端紫外光で撮像するミッションで、PHOENIX(Plasmaspheric Helium ion Observation by Enhanced New Imager in eXtreme ultraviolet)という観測機器で観測します。このミッションは、JAXAの小型科学衛星「あらせ」(2016年打上げ)やNASAのVan Allen Probe等の実施するジオスペースの「その場観測」ミッションを補完するもので、ジオスペースの理解、すなわち、将来の有人月圏探査にとって重要な、地球周辺の放射線環境の理解を深めることにつながると考えられます。
2つめの科学観測ミッションは、月の裏面における月面衝突閃光の観測です。高速で月面に衝突する小隕石の発する一瞬の光を高速カメラで検知することによって、月面に降ってくる小隕石のサイズや頻度を評価でき、将来の月面上の有人活動やインフラに対する脅威を評価します。このミッションは、DELPHINUS(DEtection camera for Lunar impact PHenomena IN 6U Spacecraft)という観測機器で行います。
シス・ルナ空間(地球から月軌道周辺までの空間)におけるダスト環境の評価が、3つめの科学観測ミッションです。DELPHINUSによる1m~10cmオーダーの固体物質分布の観測と合わせて、地球・月の重力圏に一時的に捕獲される固体物質の起源、性質、総量を俯瞰的に理解できるようになることが期待されます。通常、宇宙空間に低い空間密度で存在するダストを効率的に検知するには、大きな観測面積が必要になりますが、超小型衛星ではそのような大きな専用のダスト検知センサの搭載は困難です。そこでEQUULEUSでは、熱制御用に宇宙機に搭載する多層断熱材(MLI:Multi-Layer Insulation)の層間に、薄膜状のダスト検知センサ(フィルム)を埋め込むことにより、サイズが小さいという超小型衛星の持つ本質的な課題を解消しています。MLIが衛星の衣服のようにも見えることにちなんで、科学観測機器と衛星バス機器を統合したこの「ダスト計測器」をCLOTH(Cis-Lunar Object detector within THermal insulation)と命名しています。
ミッション選定のココロ
この3つの科学観測ミッションの選定の裏には、実は周到な考えがあります。PHOENIXは、仮に打上げ直後の最初の軌道制御運用に失敗して、月フライバイ軌道からそのまま深宇宙へ脱出してしまっても、ある程度の期間は観測でき、最小限の成果を得ることができます。次に、最初の月スイングバイ制御がうまくいったとして、EML2へ向かうその後の複雑な軌道操作運用が首尾よく運ばなかったとしても、地球―月圏近傍に探査機が留まることはできるので、PHOENIXだけでなくCLOTHの観測成果も十分に出すことができます。DELPHINUSも、EML2から常時月面を観測することで真価を発揮しますが、そうでなくとも部分的には観測可能期間を確保できます。CubeSatという極めてリソースの厳しい宇宙機でラグランジュ点に飛行するという、困難ですが成功すれば(「はやぶさ」流の加点方式で言うと)何百点満点をあげられるような工学ミッションを主軸に据えつつ、プロジェクト全体としての成果がall or nothingにならないよう、航行途中も成果を上げられるような科学観測ミッションを可能な限り搭載しているのです。このように、精一杯の背伸びをしながら、同時に、不慮の事故でミッションが全損にならないよう着実な成果を確保することが、挑戦的なプロジェクトをうまく回す肝なのだろうと筆者は考えています。
開発の現状:超高密度な探査機設計
2017年9月現在、EQUULEUSは、2019年に予定されている打上げに向けて、順調に開発を進めています。現在は、探査機全体のEM(Engineering Model:実際に打ち上げる探査機を作る前に製作し、試験に供することで設計の妥当性を確認するためのモデル)の組み上げと環境試験を完了し、試験結果を踏まえてFM(Flight Model:実際に宇宙に打ち上げるモデル)の設計を進めているところです。
探査機の外観図と内部機器配置を図2に示します。内部機器配置図で多くの面積(体積)を占めているのが推進系です。EQUULEUSでは、水を推進剤としたレジストジェット推進系AQUARIUS(AQUA ResIstojet propUlsion System)を、軌道制御と姿勢制御(角運動量管理)用に新たに開発しています。水を推進剤としている理由は、推進剤として極めて安全で、取り扱いが容易であるからですが、一方で、水をレジストジェットに用いるにあたっては、液体の水を気化させるために必要な熱量が大きいことが課題となります。EQUULEUSでは、CubeSatの限られた電力リソース制約(それでも通常のCubeSatよりはるかに大きい50Wの発電能力がありますが)の中でシステムを成立させるため、常時大きな発熱のある通信機器を水の気化室周辺に配置し熱結合させることにより、気化熱に割くヒータ電力を最小限に抑え、電力収支を成立させています。
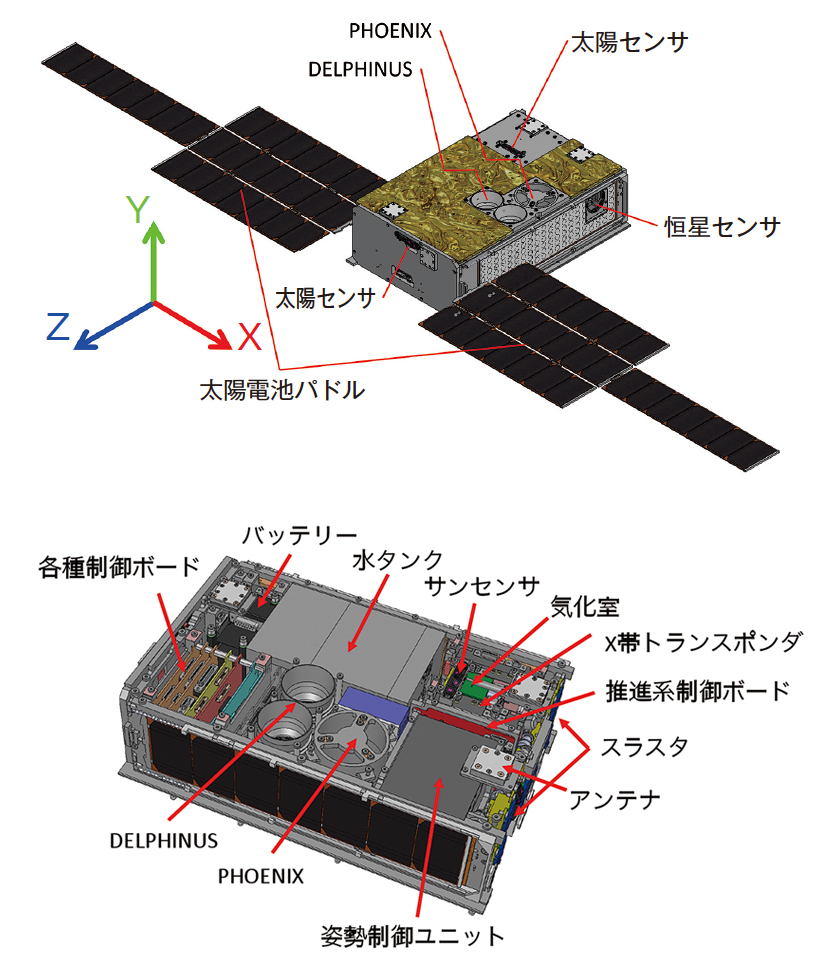
図2 EQUULEUSの外観図と内部機器配置図
その他のコンポーネントは、COTS品(汎用的に手に入る民生用の市販の既製品)を調達するか、過去の衛星ミッション(「ひさき」、IKAROS、PROCYONなど)の搭載機器の設計をベースに開発しています。姿勢制御装置と太陽電池パドルは、CubeSat用のCOTS品を調達しています。太陽電池パドルは、探査機のX軸周りにパドルを回転させる1軸のジンバルも兼ね備えています。軌道運動に伴って探査機と太陽・地球・月の位置関係が日々変化する中で、パドルを太陽になるべく正対させて十分な電力を得ながら、探査機本体の姿勢を観測対象である地球or月にポインティングすることを可能にしています。姿勢制御装置は、0.7Uの体積の中に計算機、慣性基準装置、恒星センサ、リアクションホイール(3台)を内蔵するという、超高密度実装がなされた優れものです。2003年当時はせいぜい地球低軌道で最低限の生存機能と極めて限定的な観測機器しか搭載できなかったCubeSatですが、このような小型で高機能なコンポーネントがCubeSat向けに次々と現れてきているのがここ数年の超小型衛星業界の世界的な状況で、CubeSatは本格的な宇宙科学・探査ミッションを実現するためのツールになろうとしているのです。
さいごに:超小型衛星による深宇宙探査の将来
2014年に東京大学とJAXAが共同開発し打ち上げた超小型探査機「PROCYON」は、世界で初めて50kg級という非常に小さい規模で、深宇宙からの通信や軌道変換機能を持った深宇宙探査機を実現しました。PROCYONの実現と前後して、世界では、さらに小さいCubeSat級の深宇宙探査機の研究開発が活発に行われ始めていて、SLS相乗り等の具体的な開発・打上げ計画が多数進行中です※2。日本としてもPROCYONで得た優位性を活かし、激化する探査機の超小型化競争の最前線にEQUULEUSを通じて"参戦"しているところです。超小型衛星による本格的な深宇宙探査ミッションを可能にすることで、深宇宙を多数の超小型探査機が航行するような世界を実現し、宇宙科学・探査の高頻度な成果創出に貢献していきたいと考えています。
※1 同じ2003年の打上げ機会に1U CubeSatが5機、3U CubeSatが1機打ち上げられましたが、軌道上で作動したのは東大・東工大それぞれの1U CubeSatとStanford大学の3U CubeSatのみでした。東大のCubeSat"XI-IV"(サイ・フォー)は、打上げから14年経過した現在も軌道上で作動を続けており、CubeSatの軌道上寿命の世界記録を更新し続けています。
※2 その他に、いくつかの深宇宙探査CubeSatが計画・開発されています。NASAの火星探査機InSightミッションに相乗りする2機の6U CubeSat「MarCO」は2018年の打上げを予定しており、無事に打ち上げられればMarCOが世界初の深宇宙CubeSatとなる見込みです。なお、深宇宙からの通信能力や自ら軌道変換する能力をもって深宇宙を航行した衛星としては、(CubeSatではない)50kg級の「PROCYON」が今日現在、世界最小です。
【 ISASニュース 2017年10月号(No.439) 掲載】