
The Institute of Space and Astronautical Science (ISAS) of the Japan Aerospace Exploration Agency (JAXA), in collaboration with Chuo University, Tokyo University of Agriculture and Technology, and CSIRO, Australia's national science agency, conducted a field test of intelligent cooperative exploration using a swarm of small robots.
The experiment used one of the numerous natural caves located in Chillagoe-Mungana Caves National Park in Queensland, northeastern Australia, from November 17 to 20, 2025, as part of international cooperation between Australia and Japan in solar system exploration.
Numerous vertically steep ''sink holes'' have been discovered on the surfaces of the Moon and Mars. They suggest the existence of horizontally extending underground caves called lava tubes. The underground caves are considered promising locations for future human activities such as habitats, power plants, and data centers due to reasons like shielding from cosmic radiation and stable temperatures (Figure 1).
However, underground caves are dark, inaccessible, and dangerous extreme environments that cannot be observed from above. Conventional robots are reluctant to approach due to the risk of total loss. Therefore, as part of the Japanese Cabinet Office's Moonshot R&D Project, the research group has been developing a new intelligent and cooperative exploration system using multiple small robots capable of operating in such extreme environments.
Small robots not only reduce transportation costs but also offer the easy scalability through increasing or decreasing the number of robots and risk dispersion, where partial failures do not affect the entire system. Furthermore, they can simultaneously and efficiently explore and observe large areas in swarms. We aim to establish a next-generation exploration method using multiple robots weighing around one kilogram each by inheriting the small robot technology cultivated in probes like the MINERVA series on Hayabusa 1 and 2 asteroid missions, as well as LEV rover installed in SLIM lunar landing mission.
In advancing the research, it has been our long-cherished desire to conduct a field experiment in underground caves on Earth that are comparable in scale to the subterranean caverns suggested to exist on the lunar surface.
The field test campaign included two experiments. The first was testing of swarm robots in an actual natural cave. Approximately ten small robots exported from Japan were deployed to explore diverse environments within the cave. These robots performed autonomously, while acting collectively as a cohesive group. They explored a wide area, getting into narrow spaces barely passable by a person crawling on hands and knees, reaching deep inside, and returning. Such exploration was impossible with conventional large robots. The positions of the robots as well as the terrain structure were measured in real time by CSIRO, using their Wildcat SLAM technology *.
Second experiment was measuring the reflection of radio waves used for inter-robot communication as they propagate through the complex terrain inside the cave. The robots used a technology called Ultra Wide Band (UWB) for wireless communication and distance measurement between robots, external systems. We precisely measured and recorded how the radio waves propagated within the confined space of a cave. The measurements will aid in developing a suitable communication module in lunar caves.
The insights and data obtained from the campaign are very helpful for research. We will make a maximum usage of these to accelerate the research and development of cooperative exploration robots capable of exploring unknown hazardous extreme environments.

Figure 1: Conceptual diagram of future base camp by multiple robots in Lunar underground cave
(Credit: Chuo University)

Figure 2: Robot experiment
(Credit: Chuo University)
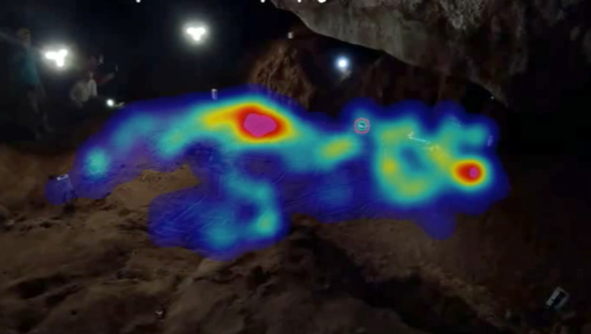
Figure 3: Explored area by robots in color (Blue, yellow, and red indicate increasing exploration frequency)
(Credit: Chuo University)

Figure 4: Robots in action. The red lights for human verification were not used by the robots
(Credit: CSIRO, Katrina Lo Surdo)

Figure 5: localization of robots
(Credit: Chuo University)
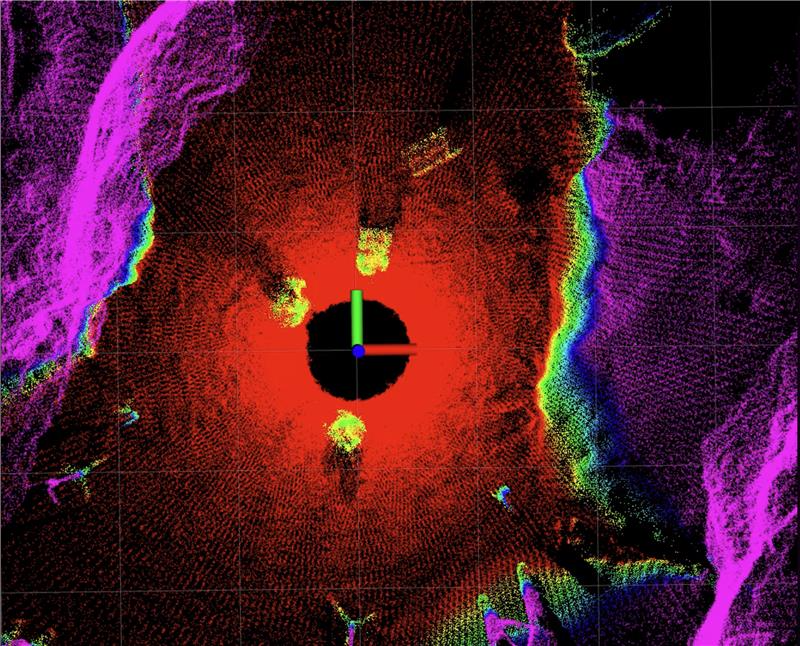
Figure 6: Measured positions of robots overlaid in reconstructed terrain
(Credit: CSIRO, Milad Ramezani)

Figure 7: Radio wave propagation measurement
(Credit: CSIRO, Katrina Lo Surdo)

Figure 8: Group photo of the Australia-Japan joint research team in a cave
(Credit: CSIRO, Katrina Lo Surdo)
Description
* SLAM: Simultaneous Localization And Mapping