TOP > 活動内容 > 科学衛星 > 小惑星探査機 はやぶさ > 小惑星探査機「はやぶさ」情報 > 軌道情報/接近情報
![]()
軌道情報/接近情報
川口プロジェクトマネージャより、最新の情報をお届けします(随時更新)
2010年6月
2010年6月8日[更新]
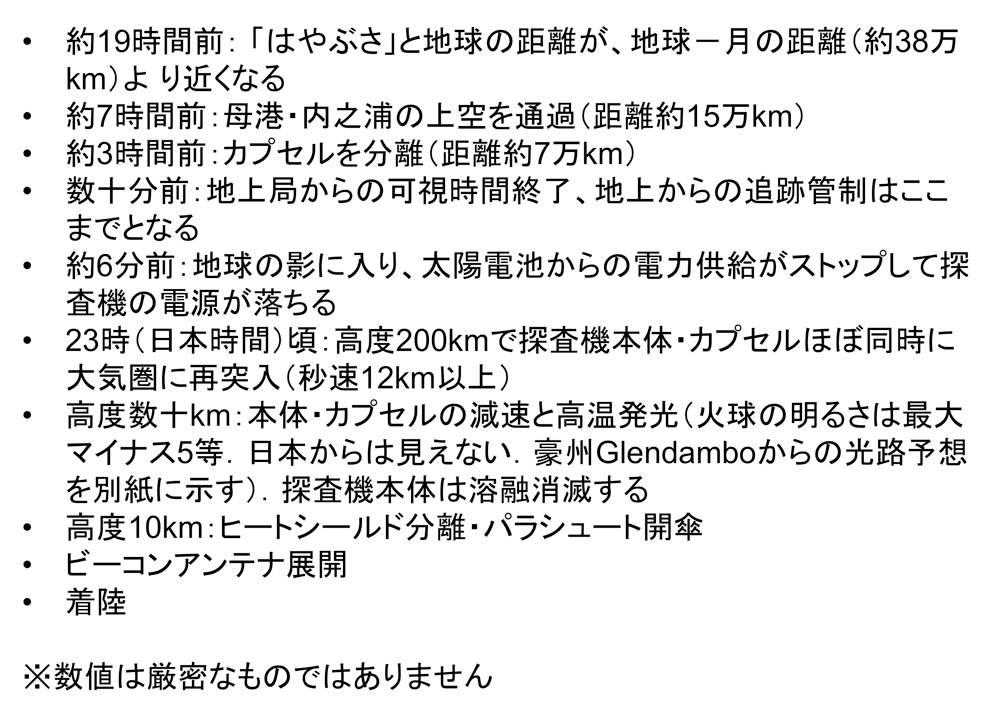
「はやぶさ」は、6月3日から5日にかけて、一連の軌道修正に中で最も重要な、地球縁部から豪州のウーメラ域への誘導TCM-3を行い、成功しました。これによって、「はやぶさ」と搭載カプセルの豪州ウーメラ域への帰還は確実になりました。
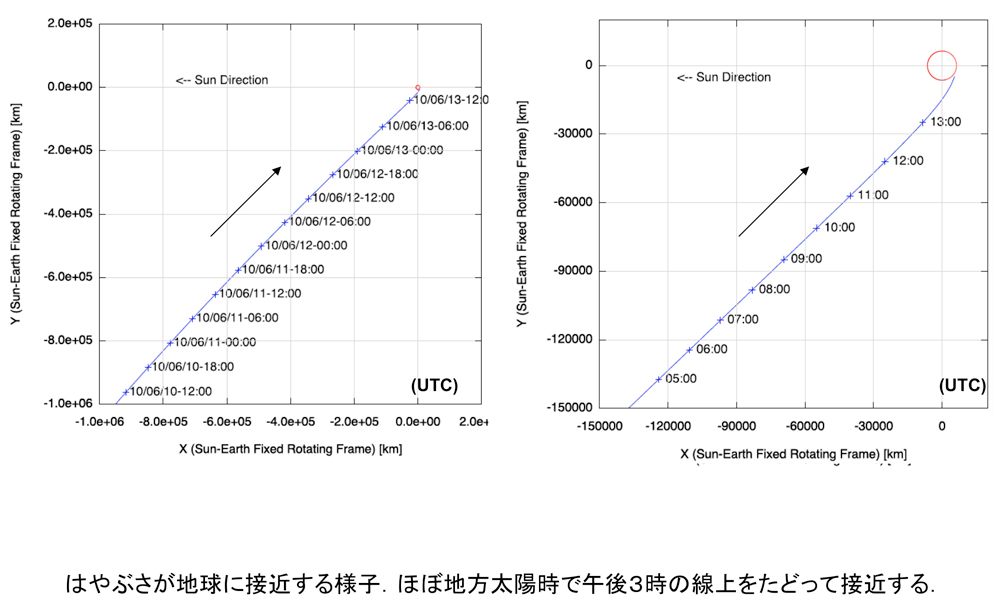
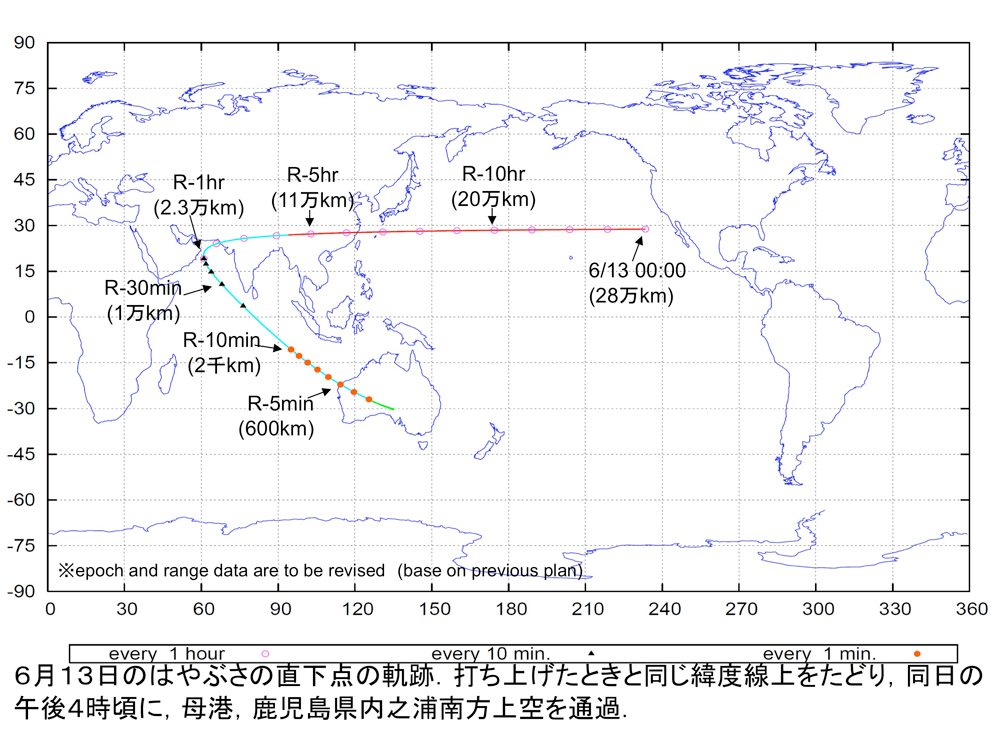
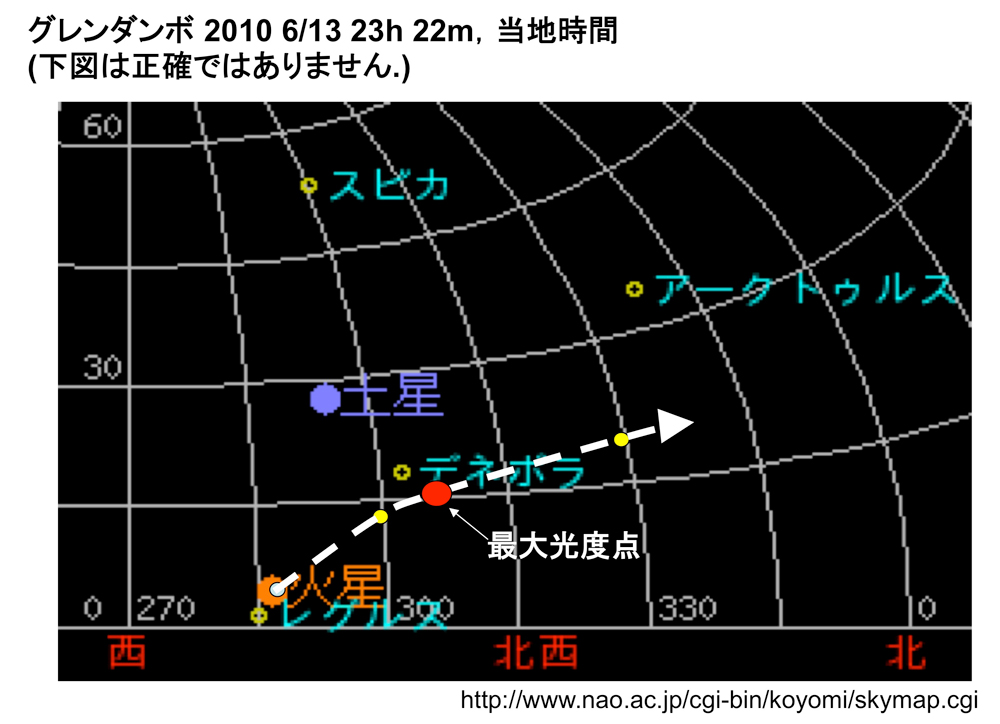
地球へ接近する状況をお知らせします。豪州グレンダンボ市から見えると予想される再突入時の光跡予想もお知らせします。6月9日に、最終の軌道修正TCM-4を実施し、ウーメラ域へ展開している回収部隊の待つ地域への精密誘導を行います。
「はやぶさ」、最終着陸態勢へ
[画像クリックで拡大画像]
|
|
|
|
2010年5月
2010年5月31日[更新]
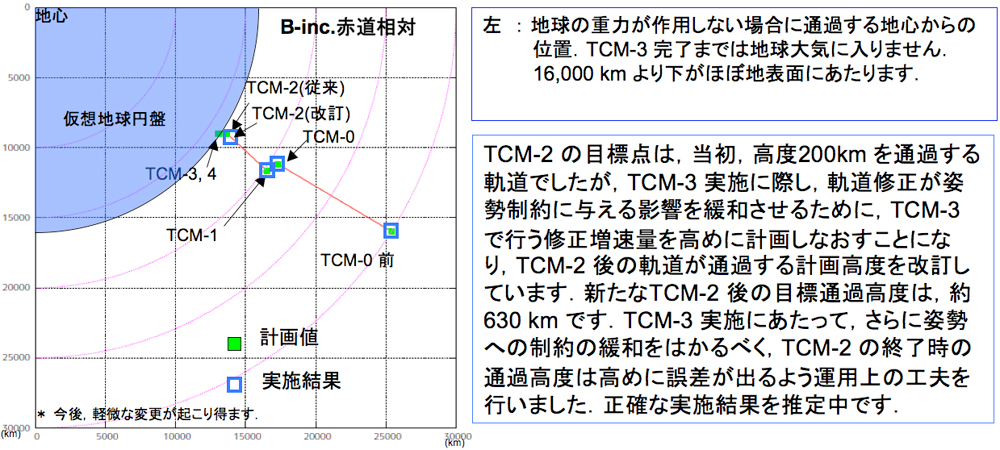
5月24日から5月27日にかけて、一連の軌道修正の中で最長の修正であるTCM-2を実施し、ほぼ予定通りに完了しました。
イオンエンジンの運転も、概ね順調でした。軌道修正結果は目下精密な推定を実施中ですが、TCM-3の実施にむけて十分に守備範囲内に誘導できたものと思われます。
「はやぶさ」、TCM-2を完了
[画像クリックで拡大画像] |
2010年5月10日[更新]
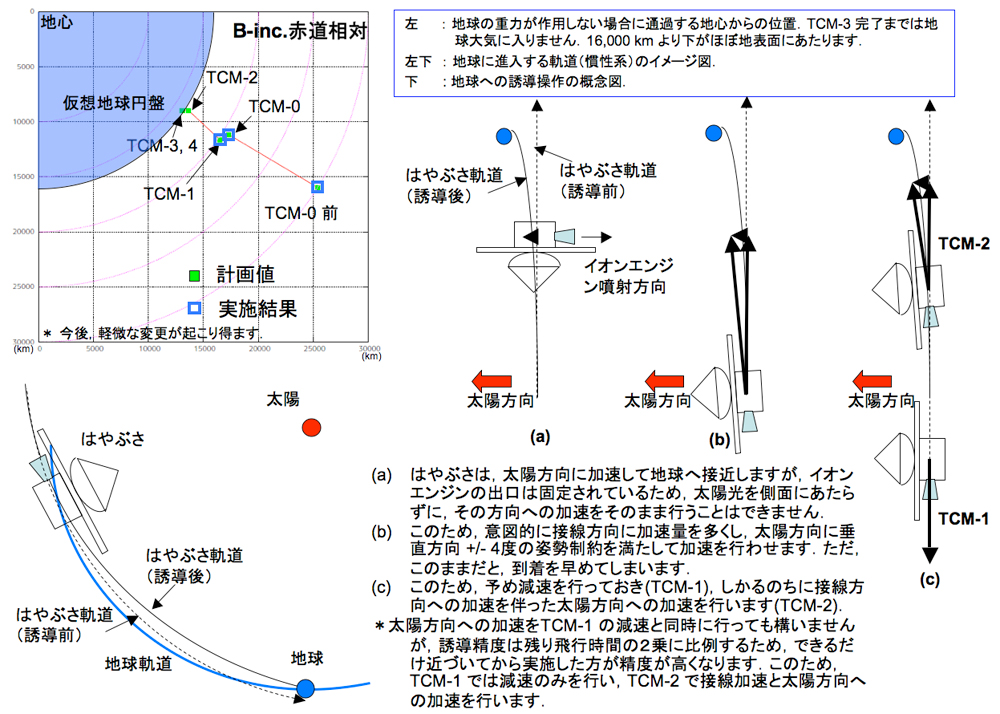
「はやぶさ」は、昨日5月9日で、満7歳を迎えました。TCM-1は、5月1日から5月4日にかけて行われ、ほぼ計画通りに実施されました。
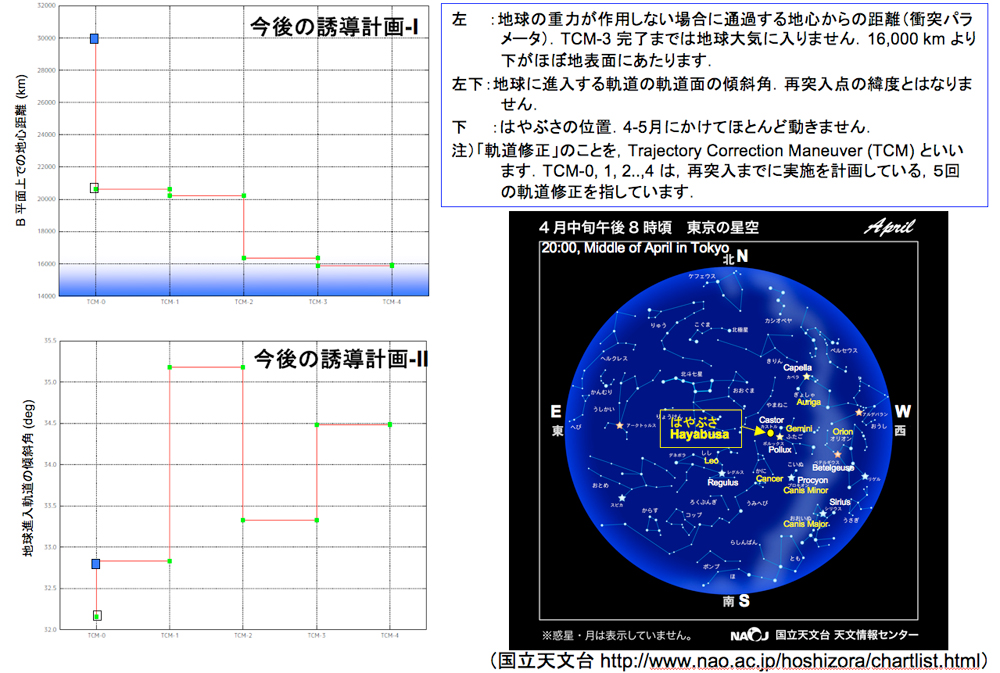
TCM-0で接近した位置と、TCM-1を終えた位置があまり地球表面から変わっていないと思われる方も多いかと思います。TCM-1では、豪州付近に到達する時刻を調整するために実施されたもので、直接に地球接近に向けて距離を短縮することを目的とはしていなかったためです。その後実施されるTCM-2と併せて、ベクトル的に太陽方向へ加速、すなわち地球へ接近させるための軌道修正となっています。姿勢に大きな制約があるためです。これを説明したものが下の図です。
今週は、光圧による風車効果で蓄積した角運動量(言い換えればホイールの回転数)を低減させる運用があります。それ以降は、TCM-2の実施に向けて、精密軌道推定を継続する予定です。
「はやぶさ」、TCM-1を完了
[画像クリックで拡大画像] |
2010年4月
2010年4月30日[更新]
「はやぶさ」は、4月4から4月6日にかけて、最初の軌道修正である、TCM-0を実施しました。結果は良好です。現在、軌道の精密推定を今月いっぱいまでの予定で実施中です。(添付の図は計画案で、今後の状況によって変更がありえます。)
「はやぶさ」の状態は、概ねこれまでと変わっていません。太陽までの距離が小さくなるにつれて、太陽輻射圧の影響も大きくなってきていて、ホイールの回転数も上がってきました。4月半ばには、は、そのホイールの回転数低減のために運用を3日間かけて実施しました。また、ゴールデンウィーク中に次のTCM-1を実施の予定です。いよいよ地球が近づいてきました。
今月末に一旦太陽までの距離が1天文単位を切り、地球軌道のやや内側に入ります。6月には、やや内側から地球に進入してくる計画です。
TCM: Trajectory Correction Maneuver 軌道修正を指します。
「はやぶさ」、初回軌道修正(TCM-0)を完了
[画像クリックで拡大画像] |
2010年4月12日[更新]
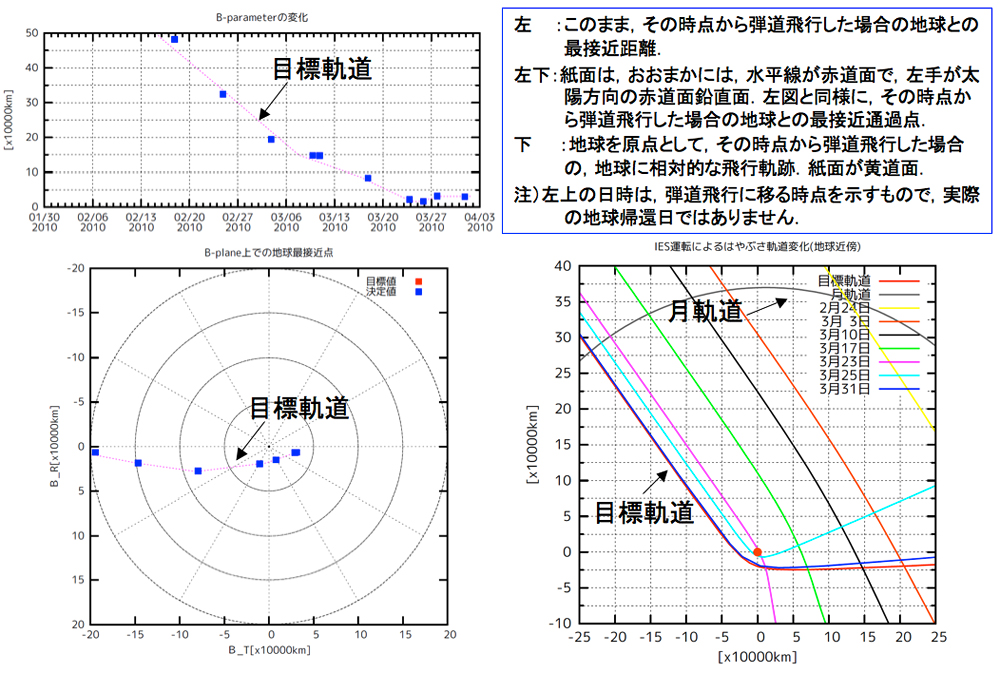
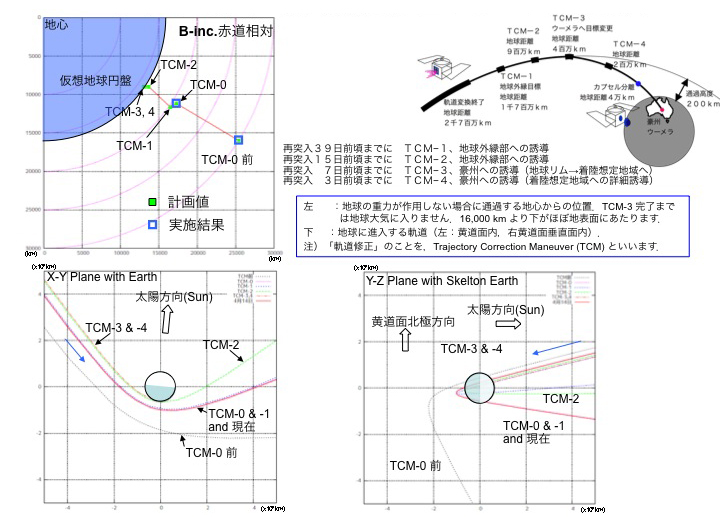
「はやぶさ」は、3月27日にイオンエンジンによる連続軌道制御を終了し、今後6月の再突入にむけて、全部で5回の軌道修正を予定しています。図で示すように、各回の軌道修正により、「はやぶさ」の地球に対する接近距離は、少しずつ短縮されていきます。
今回から、B-平面上での表現に代わって、衝突パラメータと、地球へ進入する軌道の傾斜角を軌道修正を追うごとに変化させていく計画を掲げることとしました。衝突パラメータとは、重力がはたらかないで通過する場合の最接近距離を指します。全TCMを通じて、NASA深宇宙追跡網による常時追跡およびテレメトリ、指令送達に関する支援と、カリフォルニア工科大学ジェット推進研究所による速度計測モニタの支援を受けることになっています。
「はやぶさ」は、4-5月には、双子座のポルックスの東側に見えているはずです。「はやぶさ」はほぼその方向からまっすぐ地球に向かって接近してきます。
TCM: Trajectory Correction Maneuver 軌道修正を指します。
「はやぶさ」、初回軌道修正(TCM-0)を完了
[画像クリックで拡大画像] |
2010年4月1日[更新]
「はやぶさ」は、3月27日に、昨年春からの第2期の軌道制御を終了しました。3月31日に得られた軌道の推定値によれば、ほぼ計画された目標点を通過する軌道に到達したことが確認されました。
BR-BT図で見るように、計画通りに目標点を捉えていることがわかります。慣性系での図では、目標軌道よりも鋭く曲がる軌道となっているように見えますが、これは、到達点との間になお誤差が残っていることを示しています。昨年11月から採った新たなイオンエンジンの運転形態では、どうしても直接には監視・管理できない情報があって、このために実際の推力の大きさに誤差が出てしまいます。図でみるようにスウィングバイは非常に大きな感度をもっているわけです。われわれもよく多用する手法ですが、大きな軌道制御能力をもつ反面、非常に正確な誘導技術を必要とします。
これから6月までの間に、さらに数回にわたって軌道の微調整を行っていきますが、NASA深宇宙局網の支援も得て、軌道修正中は、実時間での常時監視を行って、この誤差を把握し、精密に誘導していく計画です。
「はやぶさ」地球引力圏を通過する軌道へ!
[画像クリックで拡大画像] |