TOP > 活動内容 > 科学衛星 > 小惑星探査機 はやぶさ > 技術的特徴 > 自律型の探査機技術
![]()
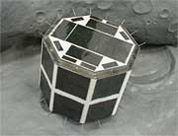
自律型の探査機技術
探査機の重量は約500kgで、その姿勢は基本的には太陽電池パドルを太陽の方向に向けるように制御されます。電波でも往復に何十分もかかる遠いところにある正確な形さえ判らない小惑星に接近するために、この探査機は高い自律機能を持ち、カメラの撮像やレーザー高度計により距離や形をとらえ、探査機自身がその場でどういう行動をとるべきかを考えます。また従来の探査機に比べても画期的な軽量化が行われる予定で、各種の搭載機器は日本の技術を結集して開発されます。
|
大きさも形状も未知の小惑星に接近・軟着陸するためには、高度な航法・誘導・制御が必要になります。航法用カメラ、レーザ高度計、近距離センサ、衝突防止センサ等のセンサを組み合わせて使うことにより、探査機は安全に接近・着陸することができます。着陸候補点に降下するためには、人工的な標的であるターゲットマーカを投下するほか、カメラから得られた画像を逐次処理して特徴のある領域を注視しながら誘導します。
探査機は、小惑星の近傍に到着後、しばらくの間、高度10km程度の上空でホバリングしながら、小惑星のデータを収集します。カメラ、レーザー高度計、X 線計測装置、赤外観測装置等を用いて、1.大きさや形、地形データ、自転軸、自転周期などの物理的力学的特性、2.表面組成と構造を調べます。これらの情報は、サンプルから得られる情報をより豊かにするとともに、サンプル採取地点を選ぶのにも役立ちます。同時に、宇宙科学研究所(現宇宙科学研究本部)が開発した小型ジャンプ・ロボット「ミネルヴァ」を用いて、表面上を移動しながらの探査も行います。

視覚誘導のための注視領域抽出
ミネルヴァ

ターゲットマーカ
