| - Home page |
| - No.221 目次 |
| - 特集号によせて |
| - 「はるか」がなし遂げたこと |
| - 「はるか」 |
| - 萩野慎二 |
| - 大型パラボラアンテナの展開まで |
| - 井上登志夫 |
| + 「はるか」の姿勢制御 |
| - 軌道を決める |
| - VLBIのための観測システム |
| - 紀伊恒男 |
| - 干渉計/VLBI/VSOP |
| - VSOPミッションとその成果 |
| - 『活動銀河核』とは |
| - ジェット |
| - 波長と周波数 |
| - シンクロトロン放射 |
| - 宇宙で最も「明るい」銀河 |
| - BL Lac天体の偏波観測 |
| - 活動銀河核3C 84のジェットと電波ローブ |
| - VSOPサーベイ観測 |
| - 「はるか」による22GHz観測の成功 |
| - メーザー |
| - 臼田Kuリンク局 |
| - 三鷹相関局 |
| - 地上電波望遠鏡 |
| - 通信総合研究所,鹿島34mアンテナ |
| - 米国国立電波天文台 |
| - NASAジェット推進研究所 |
| - VSOP,夢がかなった! |
| - VLBI,思い出すままに |
| - はるか物語 |
| - 呑み屋での話? |
| - 編集後記 |
| - BackNumber |
「はるか」の姿勢制御
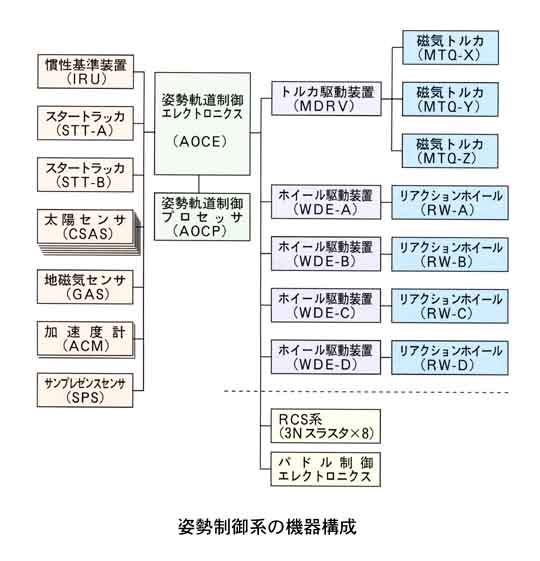
「はるか」の姿勢制御系は,ミッション実現のためにいくつかの新しい技術を使っています。ロケットにより投入された軌道から観測に適した軌道まで上昇する軌道制御機能,大型アンテナを目標の天体に誤差0.01°以内で向ける姿勢制御精度,そして多くの天体を効率的に観測するための姿勢変更機能などです。これらの目的を達成するため,下図のような機器構成になっています。
しかし,限られた重量やコストの中で制御系を構成するためには,全ての装置を冗長にして多数決をとるようなわけにはいきません。そこで,従来からの衛星運用の経験をふまえて,衛星がなんらかの異常を検出したら自動的に定常観測を中断してセーフホールドモード(スピン安定型の制御)へ移行し,地上での人間の判断を待って再立ち上げをするという方策をとっています。
初期運用においては,ロケットから分離されて後,地上からの支援無しにスピンダウン,太陽指向,太陽電池パネル展開を全て自動で行う必要がありました。最初に鹿児島局で衛星からの電波を受信するまでは,担当者一同,大変ドキドキしていました。残念ながら不安が的中してしまい,一部のコマンド設定に不適切な部分があったため,衛星の姿勢が予定とは異なる状態で最初の衛星受信時間を迎えてしまいました。直後の運用により無事回復できて,ホッとした次第です。
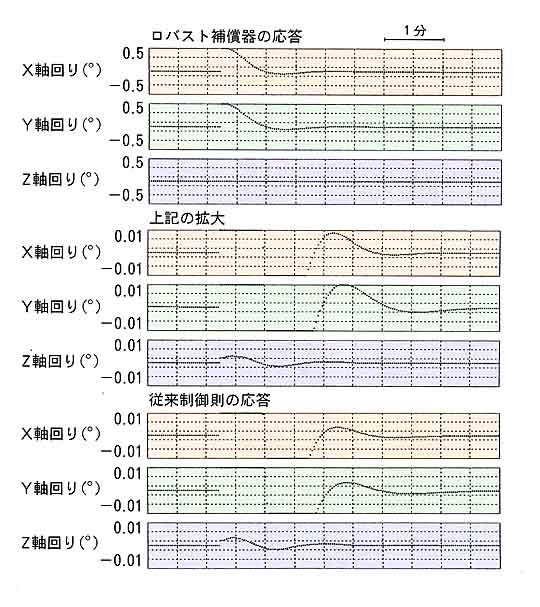
「はるか」の姿勢制御系の設計にあたって注意したことは,観測アンテナ,太陽電池パネルといった大型の構造物が付いているということです。このような構造物は柔軟性を示すために,衛星を制御しようとすると振動が発生し,うまくいかないことがあります。そのため「はるか」では,基本的には振動を起こさないようにゆっくりと姿勢を動かすと言う方針をとりました。しかし,一方であまりゆっくりしか姿勢が動かせないと天体観測の効率が悪くなりますので,計算の上,ぎりぎりの速さに設定しました。さらに,実験的に,ロバストフィルタと呼ばれる外乱推定ロジックを追加して,さらなる性能向上の試験をしました。上図は軌道上での実験結果です。従来方式より,若干ではありますが,姿勢の静定が早くなっています。柔軟構造物を有する衛星の制御については,多くの研究者がさらに進んだ研究を行っています。しかし,「はるか」の場合はまず安全性を第一に考え,基本的には古典的な制御方法で,追加機能としてロバストフィルタを付けるという方式にしたため,華々しい違いは出ていません。これも実ミッションを成功させながら地道に技術を積み重ねていく工学実験の宿命と思います。
(橋本樹明)
