| - Home page |
| - No.303 栚師 |
| + 塅拡壢妛嵟慜慄 |
| - 偍抦傜偣 |
| - ISAS帠忣 |
| - 壢妛塹惎旈榖 |
| - 塅拡偺仜恖 |
| - 搶杬惣憱 |
| - 偄傕從拺 |
| - 塅拡丒柌丒恖 |
| - 乽偼傗傇偝乿偺壢妛惉壥丂戞堦曬 |
| - 曇廤屻婰 |
| - BackNumber |
師悽戙偺彫揤懱昞柺扵嵏儘乕僶偺幚尰偵岦偗偰
塅拡忣曬丒僄僱儖僊乕岺妛尋媶宯丂媑 岝 揙 梇丂
偼偠傔偵
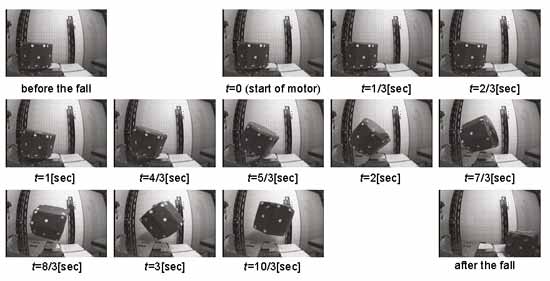
丂彫榝惎扵嵏婡乽偼傗傇偝乿偼丄偛懚抦偺捠傝丄庤偺傂傜僒僀僘偺彫榝惎昞柺扵嵏儘乕僶俵俬俶俤俼倁俙傪搵嵹偟偰偄偨丅
 |
|---|
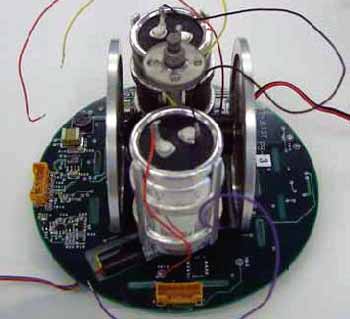
| 恾侾丂俵俬俶俤俼倁俙 |
丂俵俬俶俤俼倁俙偼丄俀侽侽俆擭侾侾寧侾俀擔偺擔杮帪娫侾俆帪俀係暘偵乽偼傗傇偝乿偐傜暘棧偝傟偨丅乽偼傗傇偝乿偑彫榝惎僀僩僇儚偵僞僢僠僟僂儞偡傞偨傔偺楙廗傪偟偰偄傞嵟拞偱偁傞丅梊掕偱偼丄彫榝惎偐傜偺崅搙俈侽m丄憡懳懍搙俆cm/s埲壓偱丄俵俬俶俤俼倁俙傪暘棧偡傞偼偢偱偁偭偨丅幚嵺偵偼丄俵俬俶俤俼倁俙暘棧帪偺乽偼傗傇偝乿偺崅搙偼俀侽侽m偱偁傝丄憡懳懍搙侾俆cm/s偱僀僩僇儚偐傜墦偞偐偭偰偄偨偨傔丄俵俬俶俤俼倁俙偼彫榝惎昞柺偵棊偪傞偙偲側偔丄懢梲傪廃夞偡傞悽奅嵟彫偺恖岺榝惎偵側偭偨丅
丂俵俬俶俤俼倁俙偼暘棧屻丄侾俉帪娫傕偺娫乽偼傗傇偝乿偲偺捠怣傪帩懕偟丄偦偺娫偵偝傑偞傑側僨乕僞傪憲偭偨丅偟偐偟乽偼傗傇偝乿偺傾儞僥僫偺庣旛斖埻奜偵弌偨屻偼丄俵俬俶俤俼倁俙偑偳偆側偭偨偐偼暘偐傜側偄丅嵟屻偵憲傜傟偨僥儗儊僩儕僨乕僞傪尒傞尷傝丄俵俬俶俤俼倁俙帺懱偵堎忬偼側偔丄彫榝惎昞柺偲偼堘偭偰慡擔徠偱丄偁傜備傞忬懺偑埨掕偟偰偄偨丅傂傚偭偲偡傞偲尰嵼傕惗偒偰偍傝丄僨乕僞傪憲怣偟懕偗偰偄傞偐傕偟傟側偄丅
丂俵俬俶俤俼倁俙偵傛傞扵嵏偼晄姰慡擱從偺傑傑廔傢偭偨偑丄俵俬俶俤俼倁俙偺奐敪傗懪忋偘屻偺塣梡傪捠偟偰摼傜傟偨惉壥偼悢懡偔偁傞丅杮峞偱偼丄俵俬俶俤俼倁俙偵傛傝摼傜傟偨惉壥傪傑偲傔丄崱屻偺彫揤懱昞柺扵嵏儘乕僶偺峔憐偵偮偄偰弎傋傞丅
俵俬俶俤俼倁俙偺塣梡偼妝
丂堦斒揑偵丄儘乕僶偺塣梡僔僗僥儉偲偟偰偼偳偺傛偆側傕偺傪憐憸偝傟傞偩傠偆偐丠丂傾儊儕僇偺壩惎儘乕僶偱偼丄抧媴偐傜儘乕僶傪捈愙憖嶌偡傞偙偲偼掕忢揑偵偼傗偭偰偄側偄丅抧媴偲儘乕僶偺捠怣帪偵偼丄夁嫀偵儘乕僶偑庢摼偟偨僨乕僞傪僥儗儊僩儕偲偟偰儘乕僶偐傜抧媴偵憲傝丄枹棃偵儘乕僶偑幚峴偡傞僔乕働儞僗傪僐儅儞僪偲偟偰抧媴偐傜儘乕僶偵憲傞丅偙傟偼丄抧媴偲壩惎偲偺揹攇揱攄抶墑偑戝偒偄偙偲偲丄塣梡偦偺傕偺偺晧壸傪彫偝偔偝偣傞偨傔偱偁傝丄儘乕僶傪偁傞掱搙帺棩壔偝偣傞昁梫偑偁傞丅
丂俵俬俶俤俼倁俙傪暘棧偟偨俀侽侽俆擭侾侾寧帪偺抧媴偲僀僩僇儚偲偺嫍棧偼栺俁壄km偱偁傝丄墲暅偱俁侽暘埲忋偺揹攇揱攄抶墑偑懚嵼偡傞丅抧媴偐傜俵俬俶俤俼倁俙傪墦妘憖廲偡傞偙偲偼晄壜擻偵嬤偄偨傔丄俵俬俶俤俼倁俙偼暘棧屻丄姰慡偵帺棩摦嶌偡傞傛偆偵嶌偭偰偁傞丅偮傑傝丄抧媴偐傜偺僐儅儞僪偼杮幙揑偵晄梫偱偁傝丄塣梡偲偄偭偰傕抧忋偱僨乕僞偑棃傞偺傪懸偭偰偄傟偽傛偄丅偲偼尵偄偮偮丄帺棩扵嵏偺偨傔偺僷儔儊乕僞傪曄峏偡傞偙偲偼壜擻偱偁傝丄傛傝椙偄扵嵏傪峴偆偨傔偵擔乆僷儔儊乕僞傪僠儏乕僯儞僌偡傞梊掕偱偁偭偨丅
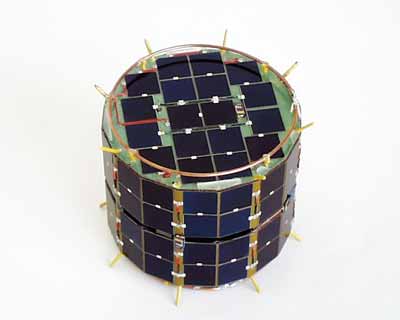
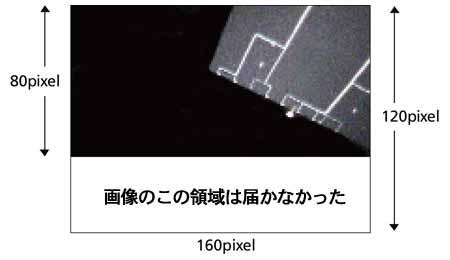
丂俵俬俶俤俼倁俙偑暘棧屻偵庢摼偟偨僨乕僞傪恾俀丄俁偵帵偡丅夋憸偼桞堦丄侾枃偩偗撏偄偰偄傞丅暘棧捈屻偵乽偼傗傇偝乿杮懱傪嶣塭偟偨傕偺偱丄懢梲揹抮僷僪儖偑幨偭偰偄傞丅
 |
|---|
| 恾俀丂俵俬俶俤俼倁俙偑庢摼偟偨桞堦偺夋憸 |
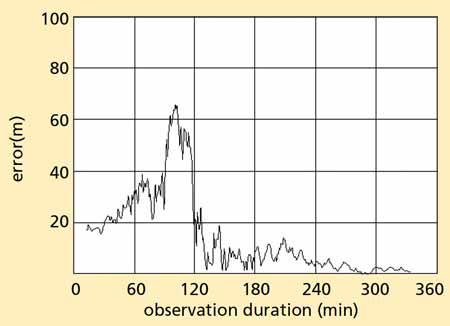
| 恾俁丂暘棧屻偺俵俬俶俤俼倁俙偺僥儗儊僩儕丅 乮倎乯僶僗揹埑偲乮倐乯奜晹壏搙寁偺棜楌丅抣偑戝偒偔曄壔偡傞帪崗偑暘棧偟偨弖娫偱偁傞丅壏搙偼懢梲偐傜偺曻幩丄彫榝惎偐傜偺曻幩丄帺屓敪擬偑僶儔儞僗偟偰偍傝丄彫榝惎偐傜偺擬曻幩偵娭偡傞抦尒偑摼傜傟傞偐傕偟傟側偄丅 |
|---|
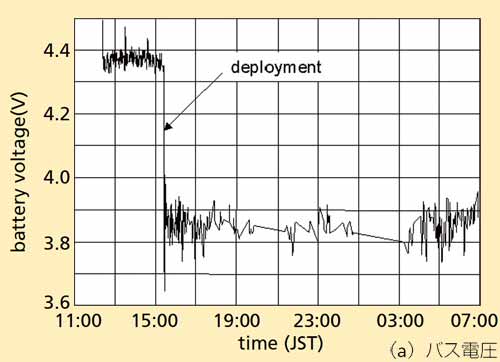 |
| 乮倎乯僶僗揹埑 |
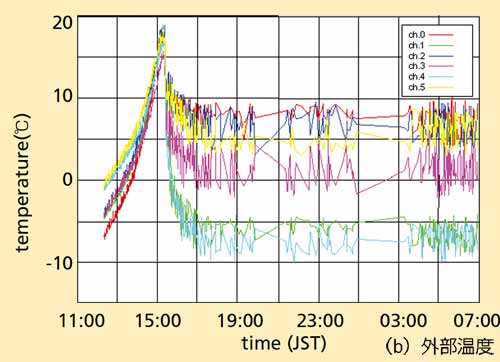 |
| 乮倐乯奜晹壏搙 |