TOP > レポート&コラム > 特集 > 太陽観測衛星「ひので」 > 「ひので」の観測を支える高精度姿勢制御
![]()
橋本樹明 JAXA宇宙科学研究本部 宇宙探査工学研究系 教授
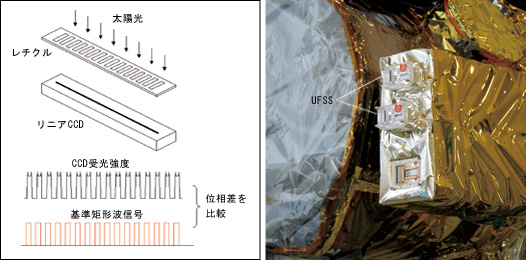
人工衛星の姿勢を制御するためには、まず衛星がどちらを向いているかを精密に測定するセンサが必要です。「ひので」の場合には、1時間の姿勢変動が2秒角(1秒角は0.00028度)以内とする必要があり、精密に太陽方向を検出する超高精度太陽センサ(UFSS)を開発しました。UFSSは、リニアCCD検出素子の前面にレチクルと呼ばれるパターンが置かれ、そこを透過した太陽光の像と基準矩形波信号との位相差から太陽入射方向を高精度に検出する姿勢センサであり(図35)、衛星から見た太陽中心の方向が約1秒角の精度で検出できます。
姿勢を安定化させ、10秒間の姿勢変動が0.3秒角以内という要求を満たすためには、姿勢の変化(角速度)を精密に測定するジャイロが必要です。「ひので」には、FRIG型とTDG型という2方式の機械式ジャイロスコープが搭載されています。両方式とも、人工衛星の高精度姿勢制御に実績のあるものでしたが、どちらを改良すれば最高性能が出るのか、10年前の検討段階では分かりませんでした。そこで、ジャイロを製造している両メーカーの技術者と協力して、2方式で競いながら開発を続けました。結果として、地上での性能試験ではほとんど同じ性能でしたので、「あとは軌道上での勝負」ということで、両方載せることにしました。人工衛星の姿勢制御のためにはX、Y、Zの3軸用のジャイロがあればよく、多くの場合は1軸故障したときに備えてもう1軸を追加して4軸構成とします。「ひので」の場合は、FRIG型、TDG型それぞれで4軸構成となる、計8軸分のジャイロを搭載するというぜいたくをさせてもらいました。
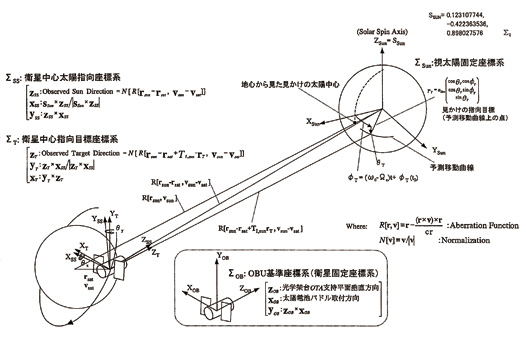
それらの姿勢センサの出力から衛星の姿勢を計算するのですが、どの座標系に対しての姿勢であるかを注意深く考える必要があります。ジャイロは、慣性座標系に対する姿勢を検出します。太陽センサは太陽の中心方向を検出するのですが、衛星の地球まわりの周回運動、太陽まわりの公転運動により光の方向が曲がって見える効果(光行差、視差)を考慮する必要があります。観測望遠鏡は、太陽面上の決まった位置に向けたいので、太陽の自転運動も考慮する必要があります。これらの座標軸の関係を図36に示します。この関係は何度考えても混乱し、姿勢制御系の会議では毎回最初の3時間ぐらいは座標系の議論をしていたため、深夜まで続くことが多くありました。
実際に衛星の姿勢を動かすためには、モーメンタムホイール(MW)と呼ばれる「はずみ車」を使用します。角運動量保存の法則から、回転する円盤を加速すれば衛星は反対方向に回り始めるので、3台以上のMWを搭載してその回転数を加減速することにより、衛星を任意の方向に向けることが可能となります。ここで問題になるのは、MWや機械式ジャイロが発生する振動です。円盤の回転軸がずれていると振動の発生源となり、望遠鏡の向きがぶれてしまうので、製造メーカーの技術者とともに、極限まで精密にバランスを取ることにしました。特にMWは、世界中で最も静かなものを求め、灼熱のアリゾナ州フェニックスに何度も足を運び、米国のメーカーのものを輸入することにしました。
可視光磁場望遠鏡(SOT)では、さらに高精度な撮像を行うため、望遠鏡に可動鏡制御機構を採用し、ぶれを補正しています。また、観測センサと姿勢センサの間の取り付け構造が熱ゆがみなどにより変形すると指向誤差になるので、温度差が付かないような熱設計、変形しない一体構造にするなど、工夫が必要でした。このように極限の指向精度の達成には、姿勢制御のみならず衛星システムとしてのもろもろの高度な技術が必要であり、理学と工学、JAXA、国立天文台、メーカーの連携により実現しています。
(はしもと・たつあき)