Next: 固有時間
Up: 特殊相対性理論
Previous: 超光速運動(super-luminal motion)
Contents
これまでに、3次元の直交変換が、天球座標の間の変換や人工衛星の姿勢に応用されることを
学んだ。さらに1次元を加えて4次元時空を考えると、同様の直交変換が、
特殊相対性理論にも使えることを見てみよう。
4次元空間における直交変換を考える。あるベクトルを元の基底で表したときの成分が
 、
新しい基底ベクトルで表わしたときの成分を
、
新しい基底ベクトルで表わしたときの成分を
 とする。
ベクトルの長さは不変なので、
とする。
ベクトルの長さは不変なので、
 |
(114) |
である。変換行列を
 と書くと、3次元のとき(34,
36)と全く同じように、
と書くと、3次元のとき(34,
36)と全く同じように、
 |
(115) |
 |
(116) |
が成立する。ここで、2.5節で述べたように、
同じ添字については1から4までの和を取る。
 を空間座標成分、
を空間座標成分、 を時間とする。
ある事象をある座標系
を時間とする。
ある事象をある座標系 で表わした「世界点」の座標を
で表わした「世界点」の座標を する。
下図のように、時刻
する。
下図のように、時刻 で原点がと一致し、
と相対的に速度
で原点がと一致し、
と相対的に速度 で移動している座標系
で移動している座標系 を考え、その事象を
で表わした座標を
を考え、その事象を
で表わした座標を
 とする。
とする。
 を光速として、
を光速として、
 としよう (
としよう ( が形式的に「虚時間」に対応していることに注意
)。
が形式的に「虚時間」に対応していることに注意
)。
このとき、式(114)は、
 |
(117) |
となり、これは相対的に等速運動をしている二つの座標系において、 で定義される「世界間隔」が不変量であることを示している。
式(116)で表わされる
との間の変換がローレンツ変換で、
式(114)で表わされるのがローレンツ不変量である。
一般に、式(114)で示されるように「長さ」が不変で、
式(116)のローレンツ変換に従うベクトルを
四元ベクトルと呼ぶ。
で定義される「世界間隔」が不変量であることを示している。
式(116)で表わされる
との間の変換がローレンツ変換で、
式(114)で表わされるのがローレンツ不変量である。
一般に、式(114)で示されるように「長さ」が不変で、
式(116)のローレンツ変換に従うベクトルを
四元ベクトルと呼ぶ。
特に、時刻で両系の原点を出発した光を考える。光の波面は球面上に拡がっていくわけだが、
時刻, における波面上の座標はそれぞれの系で、
における波面上の座標はそれぞれの系で、
 で、
式(117)は、
で、
式(117)は、
 |
(118) |
 |
(119) |
を意味している。
つまり、 系と系がどのような相対速度で動いていようとも、
どちらの系から見ても、光速はである、という
光速度一定の原理が得られた。
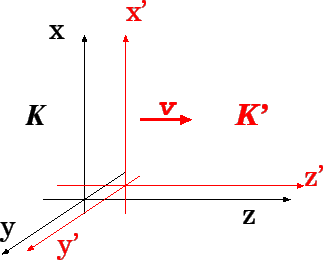
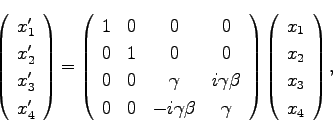
具体的な例を見てみよう。
下図のように、系の 軸(
軸( 軸)のプラス方向に、系が速度で
動いている場合を考える。
軸)のプラス方向に、系が速度で
動いている場合を考える。
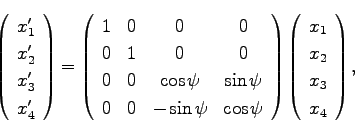
この場合のローレンツ変換は以下の通りである。
 |
(120) |
 |
(121) |
ここで、
 |
(122) |
は光速である。この変換行列が、直交条件、(115)を
満たしていること、転置行列が逆行列になっていること
 を確認しておこう。
を確認しておこう。
式(120),(121)より、
 |
(123) |
 |
(124) |
である。系の原点は 、
系の原点は
、
系の原点は であるが、これらを代入すると、
であるが、これらを代入すると、
 |
(125) |
 |
(126) |
が得られる。
(125)は、系の原点を系で表わしたときの関係式、
(126)は、系の原点を系で表わしたときの関係式で、
どちらも自明である。
3次元の直交変換は、座標系の間の空間回転を表わすのであった。同様に、
4次元の直交変換も、仮想的な回転で表すことができる。式、(120)
を以下のように書こう。
 |
(127) |
 からわかるように、ここで導入した角度
からわかるように、ここで導入した角度 は
仮想的なものであるが、ローレンツ変換を仮想的な座標軸の回転と考えても、以下で示すように、
正しい結果が得られる。
は
仮想的なものであるが、ローレンツ変換を仮想的な座標軸の回転と考えても、以下で示すように、
正しい結果が得られる。
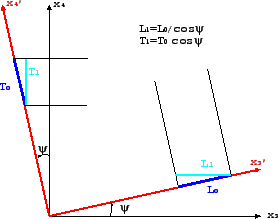
系で、 軸に沿った、長さ
軸に沿った、長さ の棒を考えよう。系から見ると、
この棒は
の棒を考えよう。系から見ると、
この棒は 方向に、速度で走っていることになる。でこの棒の長さを測るときには、
当然同時刻で測るから、それは、軸に沿った長さ
方向に、速度で走っていることになる。でこの棒の長さを測るときには、
当然同時刻で測るから、それは、軸に沿った長さ になる。
図から、
になる。
図から、
 |
(128) |
だから、
 |
(129) |
よって、走っている棒は短く見える( ローレンツ収縮)。次に、系に
固定した点における経過時間 を考える。これを系で測った時間
を考える。これを系で測った時間 は、軸に
沿って、
は、軸に
沿って、
 |
(130) |
となる。つまり、動いている時計はゆっくり進んでいるようにみえる![[*]](file:/usr/local/share/lib/latex2html/icons/footnote.png) 。
では、系から系を見たときはどうなるのであろうか?
特殊相対性原理によって、互いに等速運動をしている系から、すべての
物理法則は、全く同じに見えなくてはいけない。
。
では、系から系を見たときはどうなるのであろうか?
特殊相対性原理によって、互いに等速運動をしている系から、すべての
物理法則は、全く同じに見えなくてはいけない。
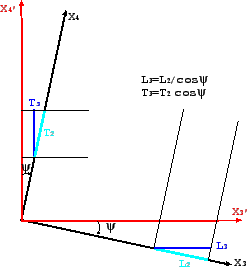
上図からわかるように、系の軸に沿った棒の長さ を
系で測定したときの長さ
を
系で測定したときの長さ は、
は、
 |
(131) |
となる。また、系に固定された点が の時間経過するとき、系における
時間
の時間経過するとき、系における
時間 は、
は、
 |
(132) |
である。
式(129)と
(131)、
(130)と(132)をそれぞれ比較することにより、からを見ても
からを見ても、まったく同じように見えることがわかる。
Next: 固有時間
Up: 特殊相対性理論
Previous: 超光速運動(super-luminal motion)
Contents
Ken EBISAWA
2011-05-30