| - Home page |
| - No.288 目次 |
| 特集 第5回宇宙科学シンポジウム |
| - 宇宙科学ミッションの新しい出発 |
| - 特集によせて |
| - 将来計画 |
| - 宇宙科学を支えるテクノロジー |
| - JAXA長期ビジョンと宇宙科学 |
| - 編集後記 |
| - BackNumber |
月や惑星の降りたいところに降りて
観たいものを観る技術
月や惑星などを調べる最初の段階は,探査機が天体の近くを通過する,あるいは探査機を天体の周回軌道に入れて,搭載したいろいろな装置で観測することです。遠隔観測が一通り終わると,着陸して表面を詳しく調べ,さらに表面のサンプルを地球に持ち帰ったり,人間が降り立って詳しく探査するようになります。現在のところ,金星,木星,土星は遠隔探査の段階,火星は着陸探査が盛んに行われており,月は人間が降りて月の石を地球に持ち帰っています。
JAXAは今年の夏,「はやぶさ」探査機を小惑星イトカワに送り,着陸して表面のサンプルを集める技術の試験をします。そのために高度な着陸誘導制御技術の開発をしましたが,小惑星は重力が非常に小さいので,ゆっくりと考えながら降りることができます。また,未知の天体からサンプルを採ってくること自体が重要なので,着陸地点を厳密に決める必要はありませんでした。
次に我々が目標としているのは,最も身近な天体である月への高精度着陸探査です。月にはすでにアポロ探査機などが何回も着陸していますが,人類はまだ安全で平坦な地点に数km程度の精度で着陸する技術しか持っていません。しかし,月は場所によって表面の特徴が違っていることが分かっています。月の謎を解くには,100m程度の精度で指定した場所(例えばクレータ中央部の地下物質が噴出している地点)に着陸し,移動ロボットで周辺を探査する必要があります。そのために必要ないろいろな技術を開発しています。
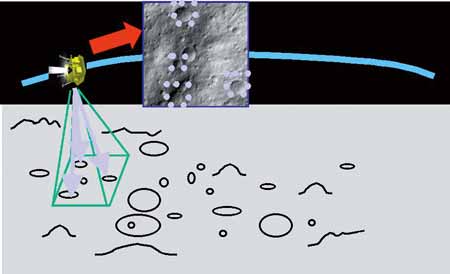 |
|---|
| 図1 高精度な自律的着陸誘導法 |
 |
|---|
| 図2 開発中のローバ |
 |
|---|
| 図3 月面探査の想像図 |
(月惑星表面探査技術ワーキンググループ)
