| - Home page |
| - No.299 目次 |
| + 宇宙科学最前線 |
| - お知らせ |
| - ISAS事情 |
| - 科学衛星秘話 |
| - 宇宙の○人 |
| - 東奔西走 |
| - いも焼酎 |
| - 宇宙・夢・人 |
| - 編集後記 |
| - BackNumber |
S-310-36号機による網展開,
フェイズド・アレイ・アンテナ実験の成果速報
東京大学大学院工学系研究科 中 須 賀 真 一
神戸大学工学部情報知能工学科 賀 谷 信 幸
観測ロケットS-310-36号機では,宇宙研の支援のもと,東京大学・神戸大学が共同して,将来の大規模宇宙構造の候補である網構造の展開と,それを利用したフェイズド・アレイ・アンテナによるマイクロ波送電の基礎実験を行った。
宇宙空間で大面積の網や膜を必要とするミッションにおいては,伸展構造物で網や膜を広げるのではなく,端を小型衛星が担うことにより展開し形状維持する方式(「ふろしき衛星」と呼ぶ)が一つの候補としてあり得る。これにより,数百m程度が限界と予想される従来の展開方法に対し,数kmの展開も可能になると思われる。その際に重要な技術的課題は,網や膜をいかに小さな容積に折り畳んで収納し,もつれることなく展開できるか,その際に端の衛星はどのような制御をすればよいか,などである。また,その前段階の研究として,展開時の複数の衛星と膜や網が干渉した複雑なダイナミクスを把握することも重要である。
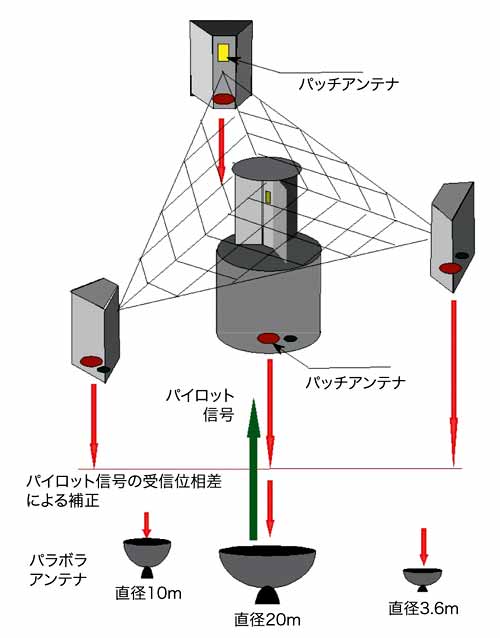
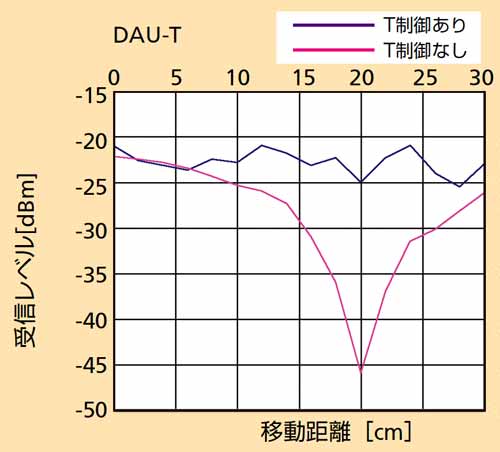
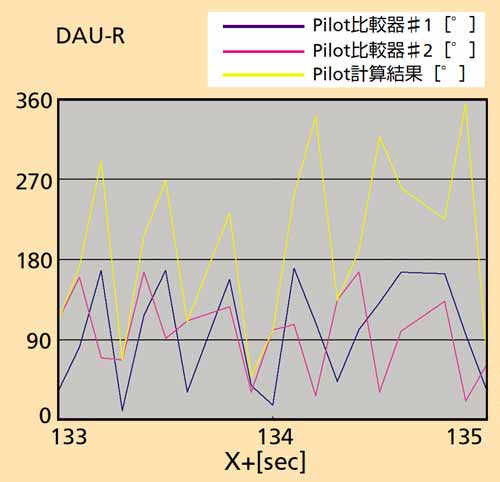
大規模網・膜構造の応用の一つとして,網に複数の送電アンテナを配置することによりフェイズド・アレイ・アンテナを構成するというものが考えられる。将来の宇宙太陽発電衛星をはじめ,超高速通信や精密レーダーなどの超大型の宇宙アンテナを実現するためには,揺れ動くアンテナ素子でも実現可能なフェイズド・アレイ・アンテナ技術が不可欠である。フェイズド・アレイ・アンテナの制御は,レトロディレクティブ方式が有望である。レトロディレクティブ方式とは,地上からのパイロット信号を用いてそれぞれのアンテナ素子での位置の変位を測定し,その変位を補正するように送信位相を変え,受信点では常に一定の位相でビームが集中するように制御するものである。
実験シークエンス
 |
|---|
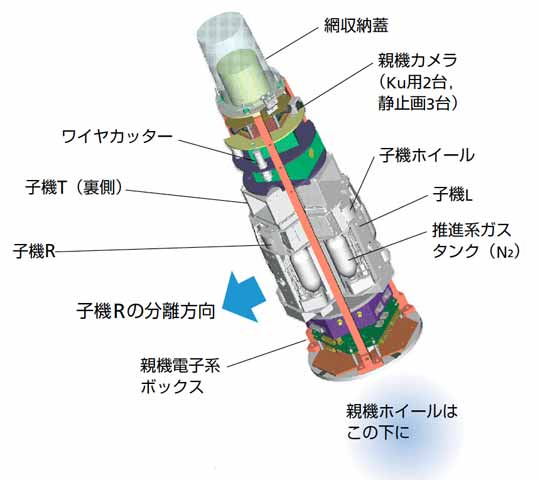
| 図1 実験システム全体図 |
今回の実験は,以上の技術の基礎実証実験として,以下のようなシークエンスで行われた。
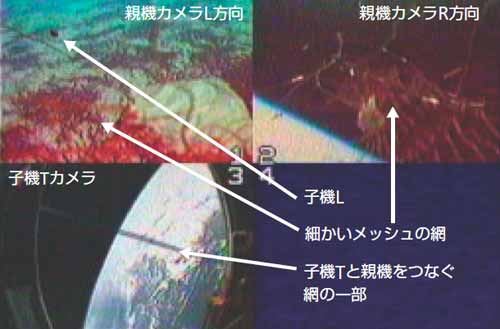
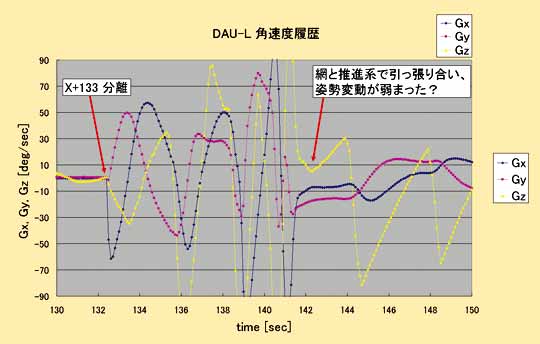
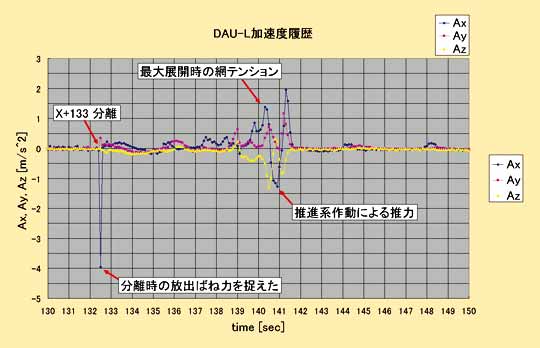
| (1) | 親機(MOT)1機と子機3機(DAU-L,R,T)がワイヤと網でつながれた状態でロケットフェアリングに搭載され,打ち上げられる。網は親機上部に収納される(図1に概略図を載せる)。 | (2) | X+83秒で共通機器部とともにロケットから分離された後,親機搭載のホイールにより約0.6Hzの残留スピンを除去し静止させる(X+84.5~120秒)。 | (3) | 網収納蓋がワイヤカッターにより分離され(X+130秒),次いで子機3機がロケット機軸に垂直な平面内で120度間隔で,バネによって約1.2m/sの初速で分離され(X+133秒),網が伸ばされていく(図2)。なお,このとき姿勢維持を図るため,親機,子機ともバイアスモーメンタム状態になっている。 | (4) | 展開時のダイナミクスを,親機と子機3機に搭載したINS(ジャイロ・加速度計),および親機・子機間の距離を測る電波センサにより計測すると同時に,親機から見た子機Lおよび子機Rの方向,子機Tから見た親機方向のカメラ映像(NTSC)をKuテレメトリでダウンリンクすることにより確認する。 | (5) | 展開中・展開後は,親機および子機3機の底面に配置したマイクロ波送受信機にて種々のフェイズド・アレイ・アンテナ実験を行う。特に,レトロディレクティブ方式の送信方法を採用することで,衛星の姿勢・位置擾乱があっても,ある程度のアンテナ特性を維持できることを実証する。 | (6) | アドバンスト実験として,子機がジャイロと画像情報をもとに親機をカメラ中央でとらえるような1軸の姿勢制御,および網が展開し終わった後バウンドバックするのを防ぐためのスラスタによる制御実験(子機LとRのみ)を行う。 | (7) | 網の展開が完了し安定するころ(X+158秒)に,アドバンスト実験として,親機の上部に収納した網上移動装置が網の上をはう実験を行う。 |