| - Home page |
| - No.297 目次 |
| - 宇宙科学最前線 |
| - お知らせ |
| + ISAS事情 |
| - 科学衛星秘話 |
| - 宇宙の○人 |
| - 東奔西走 |
| - いも焼酎 |
| - 宇宙・夢・人 |
| - 編集後記 |
| - BackNumber |
はやぶさ近況 前人未踏の挑戦 タッチダウンに成功!
 |
|---|
| 「はやぶさ」 |
探査機「はやぶさ」は,2005年11月26日に小惑星イトカワの「ミューゼスの海」付近への降下着陸を行い,試料採取のためのタッチダウンに見事成功しました。イトカワに到着して以来,さまざまな科学観測を行うとともに,着陸地点選定のための地図作りや降下誘導のための重力モデルの構築など,降下着陸への準備を行ってきました。イトカワの画像が送られてくるたびに新しい発見と感動の連続でしたが,一方,着陸誘導の観点からは,長径わずか540mという小さい天体でしかも表面のほとんどが岩でごつごつしており,非常に高精度な接近着陸技術が要求され,難易度の高いミッションであることを強く感じました。
「はやぶさ」には,未知小天体表面に自律的に着陸するための高度なセンサと新しい航法誘導機能が搭載されています。探査機はまず,航法カメラとレーザ高度計を用いて3次元相対位置を計測して接近します。イトカワが画面いっぱいになると,探査機は速度制御に切り替え,地上からの指令で位置修正および垂直降下を開始します。その後は完全自律で降下着陸を行います。探査機は目印となるターゲットマーカを投下し,表面との相対的な横速度をキャンセルします。続いて近距離センサを用いて表面に平行になるように姿勢アライメントを行った後,タッチダウン降下を開始します。降下中は,太陽電池パネルが岩などに衝突するのを避けるため,ファンビームセンサを用いて障害物を検知します。降下後サンプル採取機構が表面に接触すると,弾丸を撃ち込んで表面のサンプルを採取します。表面がどんな状態でもサンプルを採取できるように考案されたユニークな方法です。
 |
|---|
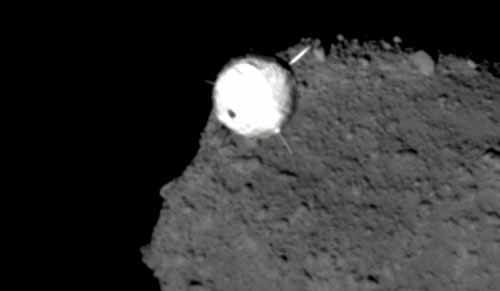
| 表紙右下写真 |
このように,「はやぶさ」には先進的な新しい技術が数多く盛り込まれているため,各機能を確認しながらミッションを遂行する戦略をとりました。まず,11月4日に接近降下のリハーサルを行い,画像処理方式と誘導方式に調整が必要であることが分かりました。すぐさま対応策を検討し,11月9日に接近再試験を実施し有効性を確認できました。また同日2回目の接近降下において,ターゲットマーカの投下(表紙右下写真)を実施しました。続いて,11月12日に着陸試料採取に向けた航法誘導機能と近距離センサの性能評価を行いました。また,探査ロボット「ミネルバ」をリリースしましたが,分離速度が許容範囲をわずかに超えたため,残念ながらイトカワ表面に着地できませんでした。しかしながら,ミネルバは分離後も通信が確保され,探査ロボットシステムとしては完ぺきに動作しました。さらに「はやぶさ」の太陽電池パネルの撮影(表紙右上写真)にも成功しました。
 |
|---|
| 表紙右上写真 |
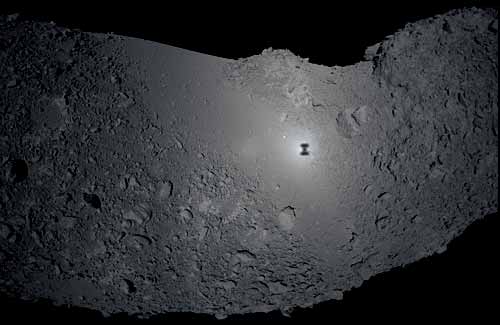
11月20日には1回目の着陸・試料採取を試みました。自律画像航法と地上からの遠隔補正誘導により,精度よく「ミューゼスの海」上空に導くことができました。また,88万人の署名入りターゲットマーカを投下し,画像トラッキング(表紙左写真)に成功しました。タッチダウン降下に移行したところで,ファンビームセンサが障害物を検知し,探査機は自ら判断して緊急浮上を試みました。しかしながら,浮上加速をするための姿勢が許容範囲外であったため,結果として安全な降下の継続が選択されました。「はやぶさ」は緩やかな2回のバウンドを経て,およそ30分間にわたりイトカワ表面に着陸し,地球からのコマンドで離陸しました。これにより探査機「はやぶさ」は,小惑星から離陸した世界初の宇宙船となりました。
 |
|---|
| 表紙左写真 |
11月26日には2回目の着陸・試料採取にトライしました。自律シーケンスは順調に動作し,ついに26日午前7時7分にイトカワ表面にタッチダウンを行い,離陸浮上しました。サンプルを採取できたかどうかはカプセルを回収してみないと分かりませんが,二度にわたりイトカワ表面にタッチダウンしたので,サンプルを採取できたのではないかと考えます。なお,「はやぶさ」は順調にホームポジションに戻ってきたところでスラスタに不具合が生じ,セーフホールドに入りました。現在回復の運用を行っています。
「はやぶさ」は今回の飛行により,地球圏内の月以外の天体において着陸と試料採取に成功しました。特に無人のロボティクス探査という点において,自律的な光学航法誘導による画期的に新しい惑星探査を遂行し,我が国独自の手法を確立・実証することができました。深宇宙探査技術面で世界の第一線に立つことができたと同時に,宇宙科学工学に少なからず貢献できたと思います。
最後に「はやぶさ」の接近降下着陸にあたり,ご協力をいただいた米国航空宇宙局の深宇宙追跡局網,臼田局,内之浦局に感謝致します。今回はLIVE中継を行うなど広報活動に多大なる支援をいただきました。そして,たくさんの方から応援や激励をいただきました。この場をお借りして厚くお礼申し上げます。
 |
|---|
| 11月26日最終降下中,高度約250mで「はやぶさ」が撮像した「ミューゼスの海」。 1回目の降下中に投下した88万人の署名入りターゲットマーカがイトカワ表面にあることを確認できた。 |
(久保田 孝)
|
|---|
