No.253
2002.4
 ISASニュース 2002.4 No.253
ISASニュース 2002.4 No.253
No.253 |
ISASニュース 2002.4 No.253
|
|
|
|---|
|
第8回微小重力環境での物のぶつかり方の研究澤 井 秀 次 郎微小重力と関わりのある工学というと,「材料工学」や「燃焼科学」,「流体力学」といった分野がまず想起されるが,機械工学系分野でも面白いテーマがある。宇宙空間などの微小重力空間を浮遊する物体の運動は基本的に全てニュートン力学で記述されるため,それ自体は単純である。しかし,その運動に複数の物体間の衝突が絡んでくるととたんに難しく,そして面白くなるのである。この分野は当初,宇宙空間で複数の宇宙船が結合する「ドッキング技術」の問題として注目された。このときの代表的な研究アプローチは,ハードウェア試験とソフトウェア解析を組み合わせることであった。まず,ハードウェア試験では,水平テーブル上に,ホバークラフトのような低摩擦で浮上する物体を複数用意して,これらの物体をお互いに衝突させてデータを取る。このとき,たとえば2つの浮上物体にそれぞれドッキング機構の雄側と雌側を搭載して,ドッキングの様子を観測したりした。ただ,この試験では,物体の運動は2次元の平面内にすぎないので,このままでは,現実の3次元世界で起きることはわからない。そのため,計算機を用いたシミュレーションでその部分を補うということが考えられた。つまり,2次元空間での実験は,計算機内の3次元世界が現実とどの程度あっているかを検証するために利用される,というスタンスである。 ただ,衝突する物体の形状や動きが複雑になると,なかなか2次元空間での試験だけでは済まされなくなってくる。そのため,衝突する2つの物体の運動を全て,計算機で計算して,それをモータを使って実際に再現しようという流れもあった。物体の衝突は,モータで運動を再現された物体に組み込まれた力覚センサで感知され,計算機に取り込まれる。計算機は,衝突のときに発生した作用・反作用の力やトルクの情報を得て,物体の運動を計算し直し,物体の運動を再現するモータへ指令を出し直す,というループを繰り返すものである。この方法は有効であり,実際,宇宙科学研究所に設置されている「9自由度ロボティクスシミュレータ」もこの流れに乗った装置である。ただし,これでも衝突が数多くの物体の間で連鎖的に起きる場合や,形状が著しく変化する場合,さらには衝突現象が極端に速い場合には限界がある。 そこで,機械力学の分野でも近年,落下塔などの微小重力実験手段を用いて直接,良好な微小重力環境での物体の挙動を見ようという動きがある。ここでは,そのうちの2つの研究について,簡単に紹介したい。 ひとつは,微小重力空間で低反発衝突を実現する機構についての研究である。宇宙空間では時として粘着性のある有機系物質が好まれないため,低反発を実現するのに,「お手玉」のような機構を考えた。外側の殻の中に玉をいくつか詰めたようなものである。この機構が床など他の物体に衝突した場合,定性的にいえば,内部の玉が多数回,お互いに衝突することで運動エネルギーを消散していき,低反発を実現する。しかし,実際に,定量的に現象を把握するためには,やはり実際に微小重力空間で衝突させてみることが重要である。実験時間の制約はあるが,現実の微小重力空間で起こる衝突を観測することで,計算機シミュレーションで必要な様々なパラメータのありようが明らかになるのである。
 
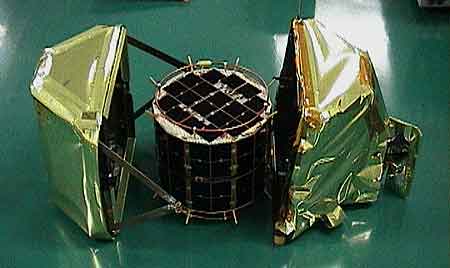
もうひとつは,移動ロボットの研究である。たとえば,微小重力天体上での移動手段を考えた場合,車輪を使っての移動というのは効率的ではない。というのも,タイヤを大地にグリップするような重力が働かないため,タイヤを回しても簡単に空転してしまうためである。そこで,天体表面を蹴り上げて,ホッピングしながら移動していく,ということが考えられる。宇宙科学研究所では,このようなタイプのロボットを微小重力実験などを通じて研究している。その成果の現れのひとつが,今年の冬に打ち上げ予定の「MUSES-C」衛星に搭載される予定の小惑星ホッピングローバ「ミネルバ」である。こちらは,微小重力空間での衝突現象を積極的に制御することで目的の行き先を目指すことになるため,制御系と衝突現象の相互関連を実際の微小重力空間で観測することが大切になる。
 ここでは2つの例をあげたが,このように,一見,単純に思える微小重力空間での物体の運動の中にも,地球重力に慣れきってしまった我々人間の頭では,にわかにはわからないエキサイティングなことも潜んでいるのである。 (さわい・しゅうじろう) |
|
|---|
