その四 パソコンによる惑星探査ローバの知能化
久保田 孝
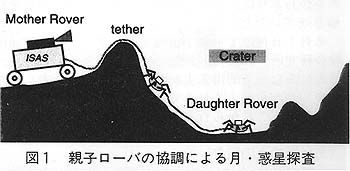 月・惑星探査用ロボットとして,ローバ研究グループは,図1に示す親子協調型ローバの研究開発を推進しています。親ローバは,比較的平坦なところを長距離移動します。一方,子ローバは必要に応じて親ローバから降りてクレータ内部や崖付近などの険しいところの探査を行います。親子ローバが協力しながら科学探査を行うのが特徴です。
月・惑星探査用ロボットとして,ローバ研究グループは,図1に示す親子協調型ローバの研究開発を推進しています。親ローバは,比較的平坦なところを長距離移動します。一方,子ローバは必要に応じて親ローバから降りてクレータ内部や崖付近などの険しいところの探査を行います。親子ローバが協力しながら科学探査を行うのが特徴です。
ローバの誘導制御方法としては,大きく分けて地上からのテレオペレーションと人工知能による自律誘導が考えられます。惑星探査において,科学者の意図をくみとって,その指示通りに行動してくれるローバが要求されます。また通信時間が非常にかかる場合には,自律的に判断して行動するローバが必要となります。従って,両者の機能を有するローバが望ましい探査ロボットといえるでしょう。その際,威力を発揮するのが搭載コンピュータです。ローバは,搭載コンピュータを用いて種々の情報を処理することにより,大きな岩や窪地の認識,マップの生成,経路計画,自己位置同定,誘導制御,地上との交信,ユーザフレンドリなマンマシンインタフェース機能,予期せぬ障害物の回避など高度な知能を備えることができます。
図2 子ローバ(多脚型ロボット)
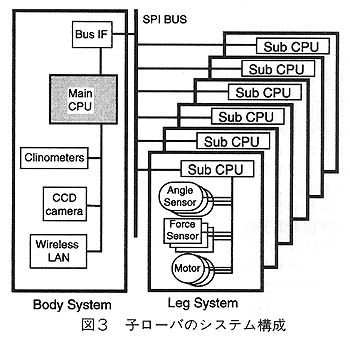
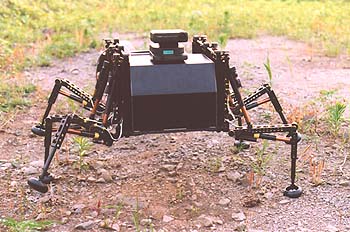 図2は,子ローバの研究用実験モデルを示しています。頭部に人間の目に相当するCCDカメラを搭載し,六足歩行により不整地を移動します。図3に子ローバのシステム構成を示します。各脚はそれぞれCPUを有し、独立に各関節の制御を行います。各SUB-CPUはBUSを介して他の脚のCPUやメインCPUと結合され,階層型制御及び自律分散型制御が可能となっています。このように配置することにより負荷分散・高速処理・フォールトレランス機能を実現しています。
図2は,子ローバの研究用実験モデルを示しています。頭部に人間の目に相当するCCDカメラを搭載し,六足歩行により不整地を移動します。図3に子ローバのシステム構成を示します。各脚はそれぞれCPUを有し、独立に各関節の制御を行います。各SUB-CPUはBUSを介して他の脚のCPUやメインCPUと結合され,階層型制御及び自律分散型制御が可能となっています。このように配置することにより負荷分散・高速処理・フォールトレランス機能を実現しています。
メインCPUとしては、おなじみの Pentium を用いています。ローバ搭載コンピュータとしては,種々の情報を処理する高速CPU,豊富なメモリ,拡張性豊かな入出力,しかも小型軽量で低消費電力であることが要求されます。昨今のマイクロエレクトロニクス技術の進歩によりノート型パソコンやサブノートパソコンがそのまま地上試験用ローバに搭載することが可能となっています。またPC-Cardの出現により,画像データの取得,モータ制御など小型軽量なインタフェースが揃っています。宇宙用としても,民生用RISCチップに放射線試験を行ったところ,良好な結果が得られており,100MIPS程度のCPUが宇宙で活躍するのもそんなに遠くはないでしょう。パソコンではソフトウェアも充実しており,またLINUXを使えば,WSと同じ環境になります。パソコンやWSでシミュレーションしたプログラムをそのまま実装するだけで,探査ローバを動かすことが可能となるわけです。あなたもローバを動かしてみませんか?
 ISASニュース 1997.2 No.191
ISASニュース 1997.2 No.191