RESEARCH
磁気力を用いた宇宙機制御
磁気フォーメーションフライト
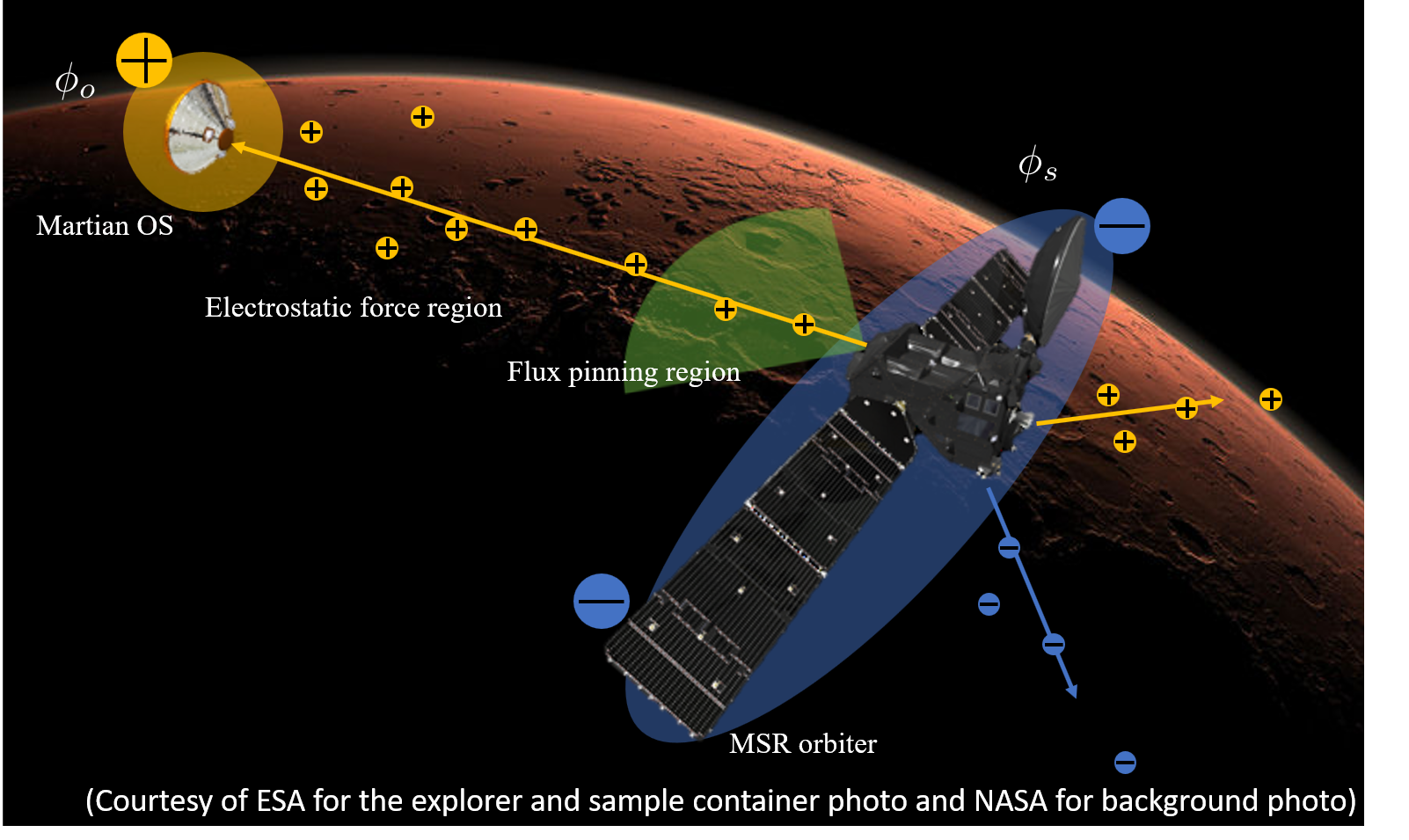
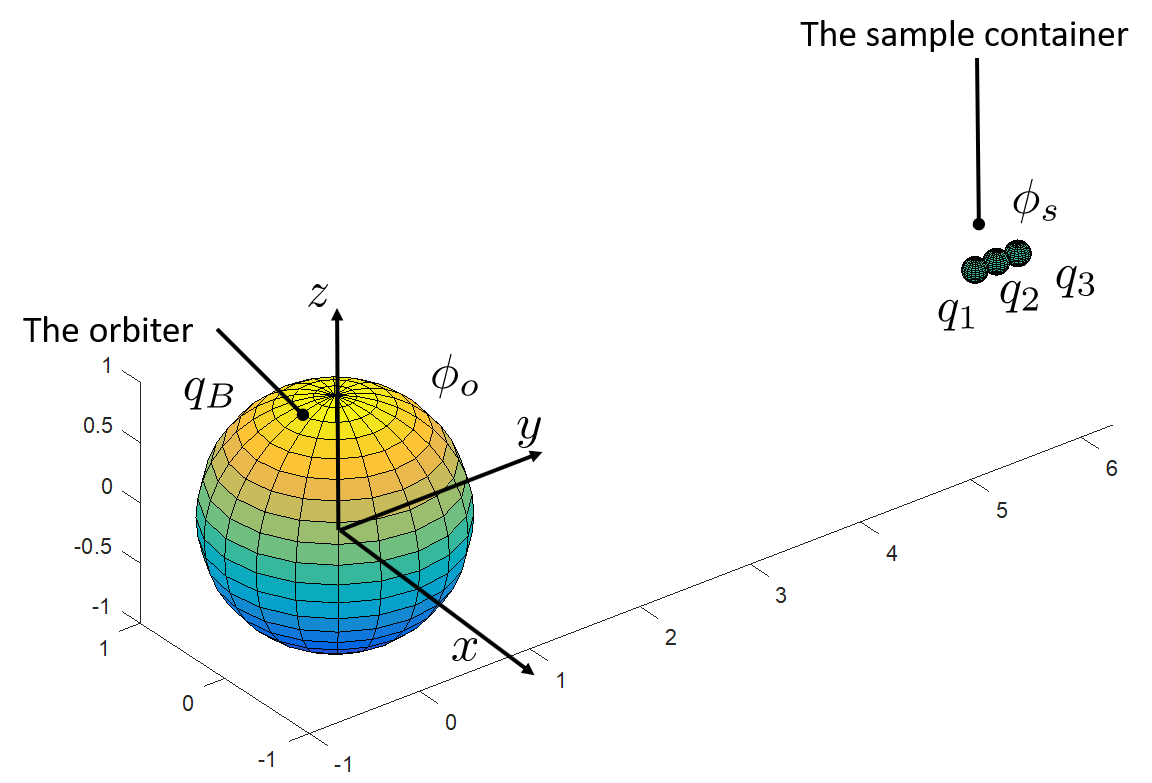
海外の研究室と共同で重力天体からのサンプルリターンのための自動ランデブードッキングシステムの設計について取り組んでいる.静電相互作用を用いて非協力対象であるサンプルコンテナの状態制御を行うシステムを設計し,評価する.
 |
 |
磁気による制振制御
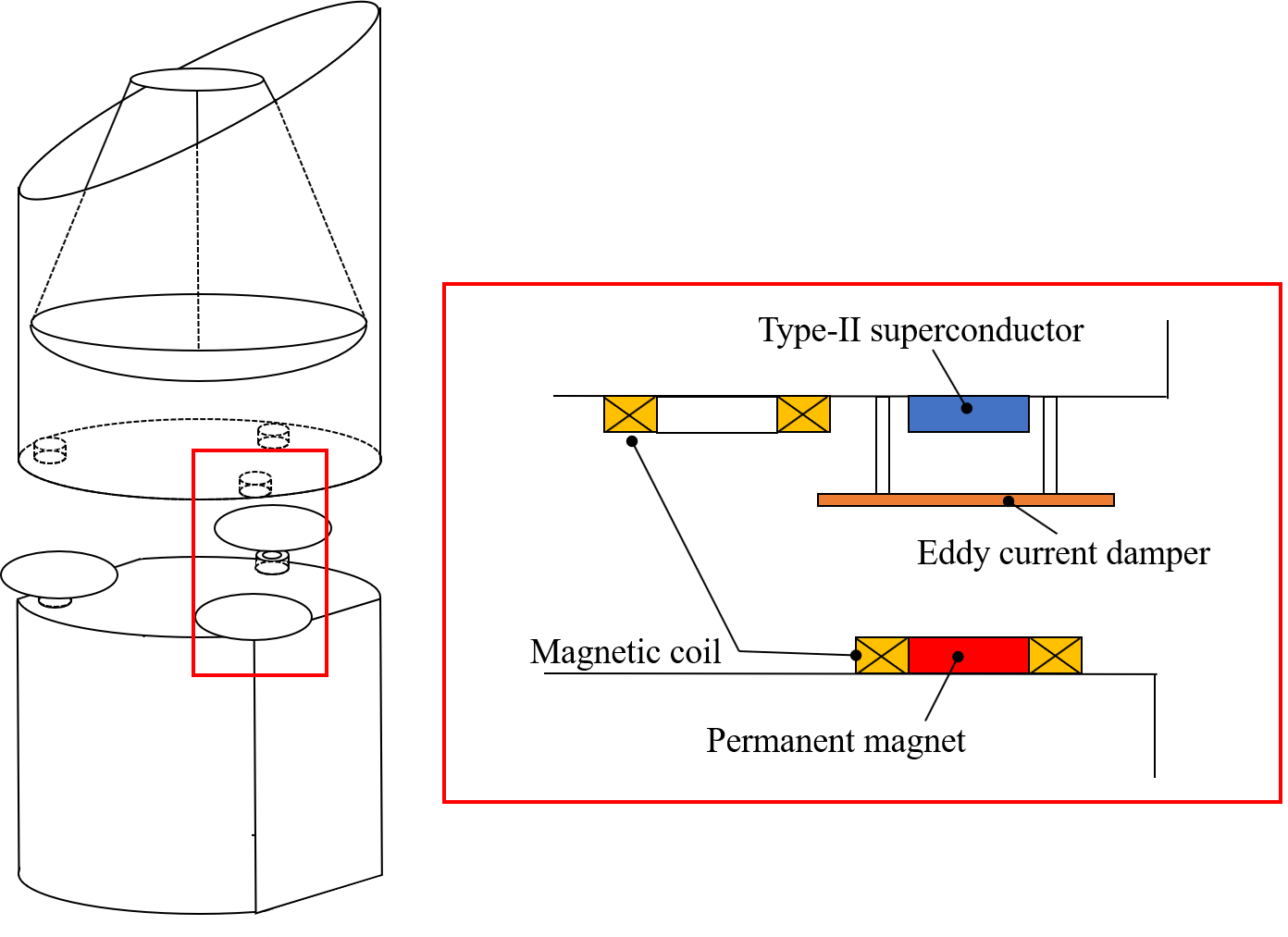
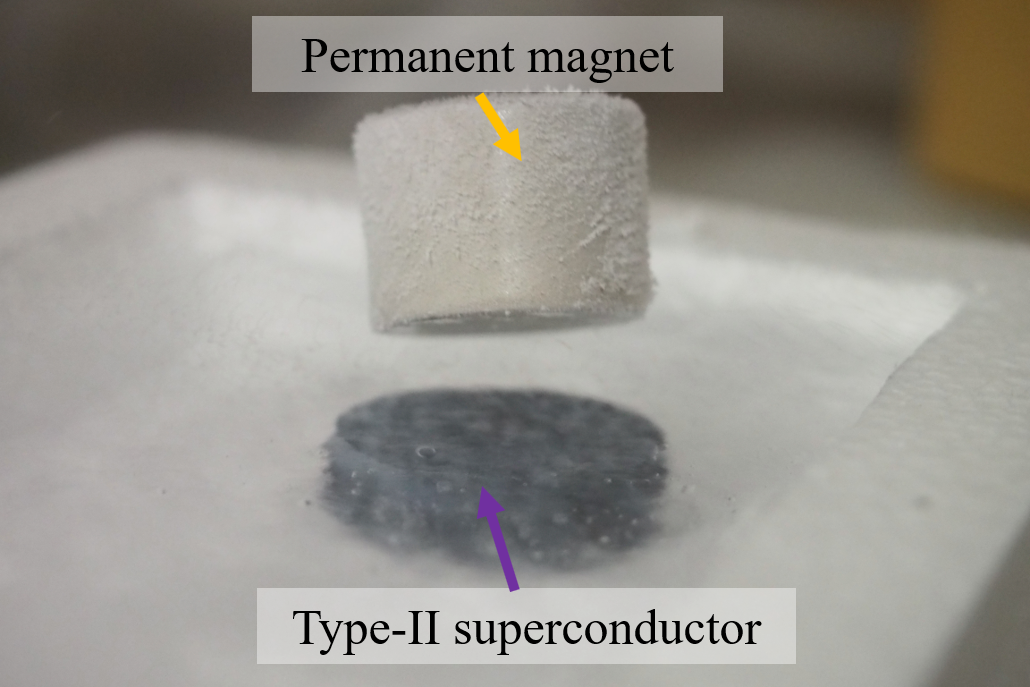
次世代宇宙望遠鏡のためにミッション部とバス部を磁気的に接続する新しい微小擾乱抑制機構を提案している.受動的にミッション部とバス部の相対位置と姿勢を維持するために磁束ピンニング効果を応用し非接触型微小擾乱抑制機構を構築する.
 |
 |
磁気編隊飛行による分散宇宙システムの衛星設計と運動計画
磁気フォーメーションフライト技術を用いた分散宇宙システム実現のための衛星設計手法と運動計画に関する研究を行っている.磁気力を用いて構成された大型宇宙構造物は従来のスラスタのように燃料に依存しないことから長寿命が期待される.応用先の一つである分散宇宙アンテナは複数の小型衛星を協調させることで所望のフォーメーション形状を達成し,深宇宙や地上の携帯端末との通信を可能にする.しかし,磁気力を制御力として用いることから電力消費を考慮する必要があり,これは送信電力のような分散アンテナ性能にも影響する.そのため,制御と通信それぞれのトレードオフを考慮したアクチュエータ(コイル)設計や運動計画を行う必要がある.
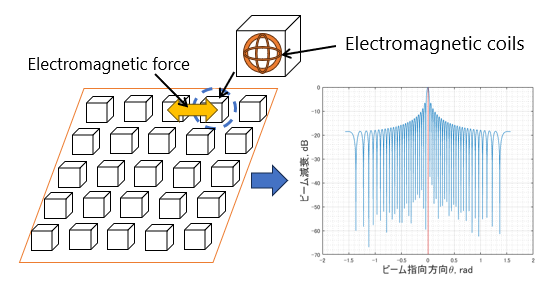
分散宇宙アンテナに関する検討例
磁気による6自由度近傍制御
磁気フォーメーションフライトを用いて大型の分散宇宙システムを実現するためには、宇宙機同士を近い距離で高い精度で扱えることが重要です。これは電磁力は距離が離れると急激に弱くなるため、常伝導コイルで実用的な推力を得ようとすると、近接領域での運用が避けにくくなるためです。
一方で、この近接領域では磁場の空間分布が単純な近似では捉えにくく、相対位置だけでなく姿勢やわずかなずれにも敏感に応答が変化します。こうした近接磁場の複雑さを踏まえつつ、オンボードで実行可能な実時間性を確保し、近接領域における所望の相対位置・姿勢精度を実現する制御器の設計に取り組んでいます。

磁気フォーメーションフライトによる近傍制御
着陸誘導制御
より精密な科学探査のために,月・惑星への精密着陸の研究や技術実証プロジェクトSLIMが行われています.精密な着陸には,探査機が自身の位置を認識するためのカメラや,地球からの助けを借りずに着陸目標まで飛行する誘導技術が必要です.
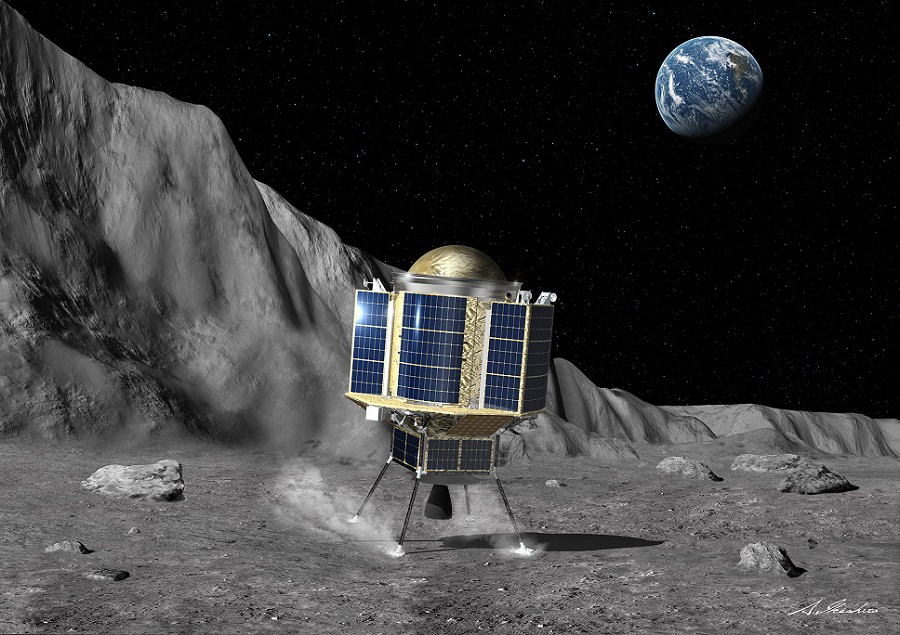
SLIM
精密着陸のための航法最適軌道
これまで,最小の燃料で着陸する誘導技術の研究はありましたが,探査機の位置認識精度が低下すると着陸の精度が悪化します.そこで,残りの燃料を考慮しつつ,カメラによる位置推定精度が高くなる軌道(低空飛行する,特徴量が多い地形にカメラが向く等)を飛行することで,着陸精度を向上させる研究を行っています.
具体的には,航法計算で使われるカルマンフィルタの共分散行列が小さくなる,航法最適な軌道を飛行する必要があります.そのために,解くべき最適制御問題を離散的な線形化で凸計画問題に変形し,オンボードで最適化計算を実行する研究を行っています.
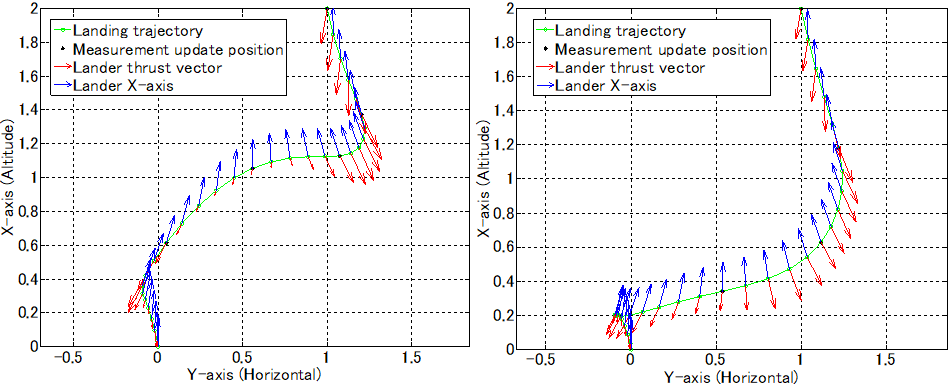
燃料最適な軌道(左図)と航法最適な軌道(右図)の例
逐次凸化(SCvx)
着陸誘導では,目標地点までの軌道を機上で高速に生成する必要があります.これに対し,最適化による誘導手法として逐次凸化法(SCvx)を用いた理論・応用研究を行っています.
応用面では,降下中に科学観測を行うシナリオにおいて,観測効率を最大化する着陸軌道の検討を行っています.具体的には,軌道計算の評価指標に「情報エントロピー」を新たに導入し,SCvxを用いて,観測性能を最大化する軌道を効率的に求めています.
理論面では,クォータニオンのノルム制約など,従来は外部的な制約条件として扱われていた多様体構造を「解空間そのもの」として捉え直す手法に注目しています.この手法をSCvxのアルゴリズムに直接組み込むことで,計算の効率化と精度の向上を目指しています.
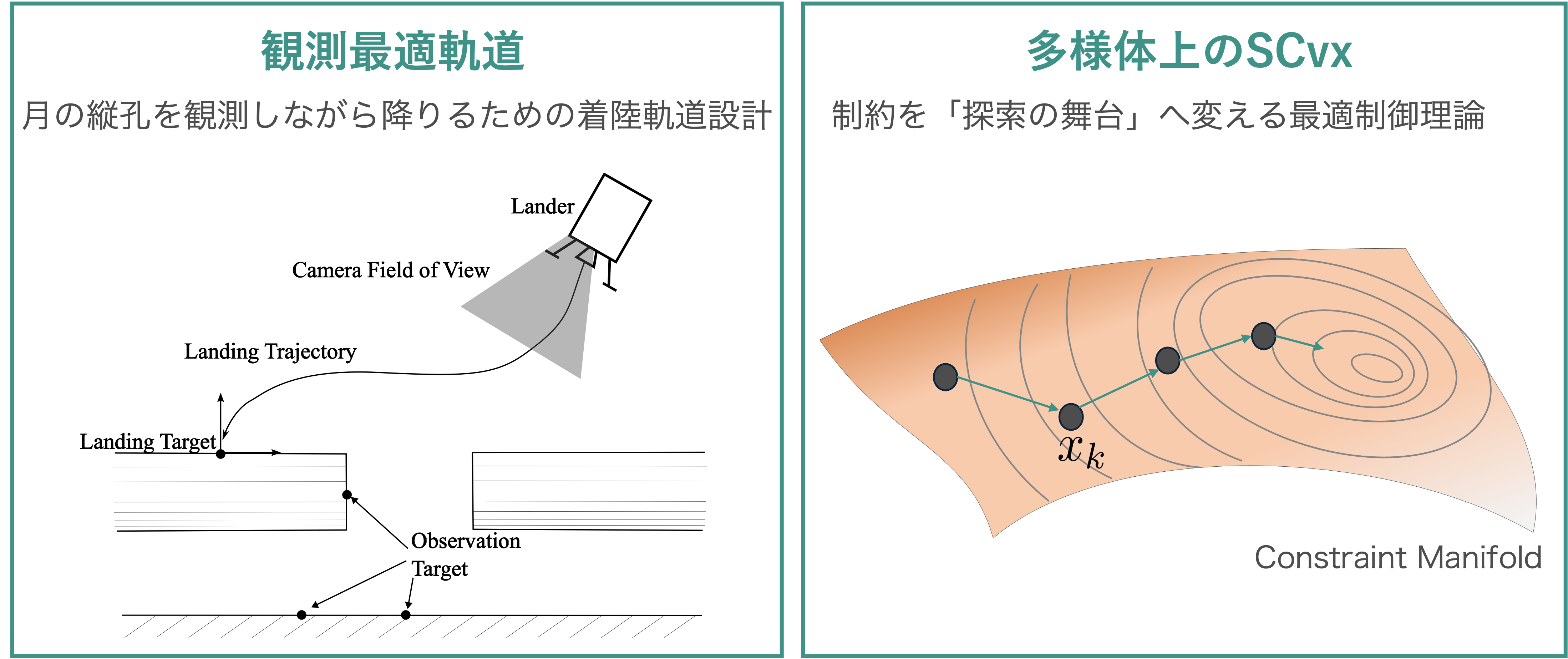
SCvxの研究
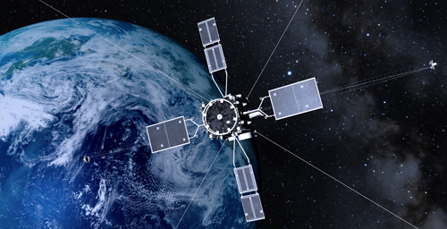
ワイヤーアンテナ衛星(惑星磁気圏探査衛星)の制振制御
惑星磁気圏の構造や, 太陽風と地球磁気圏との相互作用などの発生メカニズムなどを解明するために現在までに数多くの惑星磁気圏探査衛星が打ち上げられている.惑星磁気圏探査衛星には, 電磁場を観測する観測機器であるワイヤーアンテナと呼ばれる長さ15~50 mほどの細長い構造物がついており, 従来はこの張力を確保するために「スピン安定方式」という衛星本体をコマのようにスピンさせる受動的な姿勢制御方式がとられています.(ジオスペース探査衛星「あらせ」の姿勢制御系など) しかし, この方式では衛星設計の自由度が制限されたり, 観測のための機動的な姿勢変更を行なうことが難しいなど課題が多く, 具体的には, スピン安定方式は衛星本体を回転させることによるジャイロ剛性を利用した受動的な姿勢制御方式であるため, スピン軸の方向を制御し, 観測姿勢を機動的に変更することも難しいことや, 衛星本体が回転しているため, カメラ等の光学観測機器による観測も難しくなることなどが挙げられます.このため, 従来は搭載される観測機器ごとに別々の衛星を打ち上げる必要がありました.
『あらせ』
本研究では, これらの問題を解決するために, 従来方式に改良を加えた「二重スピン安定方式」
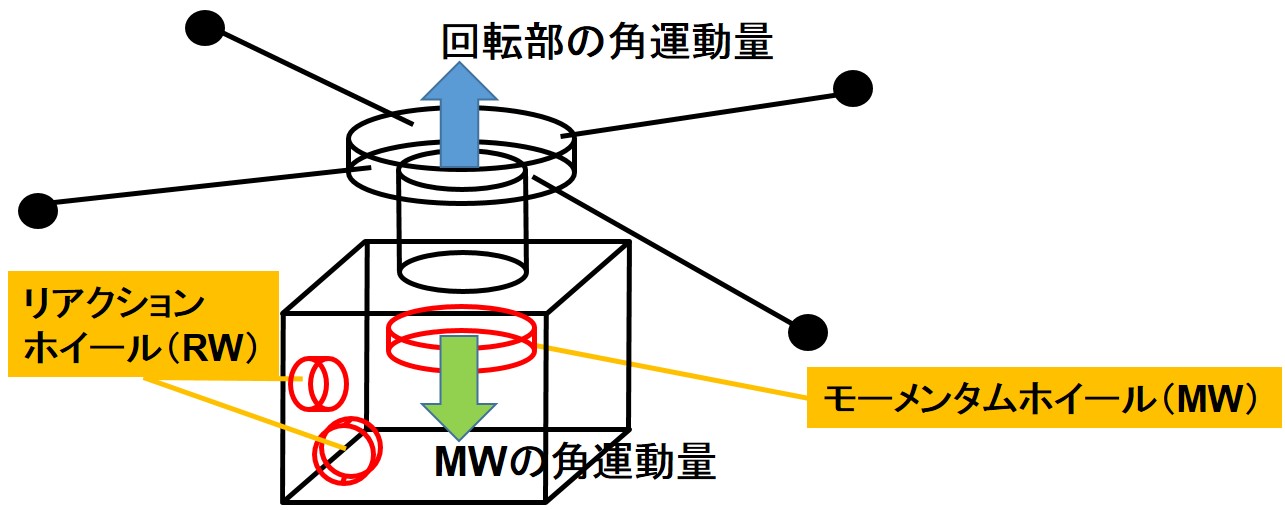
ワイヤーアンテナ衛星のモデル化